视觉导航型无人机反制技术研究
2024-05-21 01:46王奕天李建华陈佳乐许铎
中国军转民 2024年7期
王奕天 李建华 陈佳乐 许铎
近年来,无人机在各个领域得到广泛应用,其正向应用利国利民。然而,无人机普及的同时也给社会带来了新的安全威胁[1]。首先,无人机的高空俯瞰功能可能被用于侵犯他人隐私。现在的无人机已经具备了高清摄像和长时间续航的能力,一些不法分子利用无人机在住宅区、商业区等地进行非法拍摄,窥探他人隐私。这种行为不仅侵犯了个人隐私权,也可能泄露商业机密或国家机密。其次,无人机的潜在恐怖袭击威胁越发引人担忧。由于其机动性和强大的载荷能力,无人机成为携带危险物质如爆炸物实施恐怖袭击的理想工具。2023 年5 月3 日的乌克兰克里姆林宫袭击事件清晰地展示了这种威胁对社会稳定的严重冲击。最后,无人机也可能成为民航[2]领域的威胁。由于无人机可以在低空飞行,若有无人机进入民航起飞区域,会产生不可估量的危害和损失。鉴于无人机对重大会议和敏感区域的安全构成日益严重的威胁,反制无人机技术已经成为维护公共安全的不可或缺的一环。视觉导航型无人机是一种通过计算机视觉系统进行导航的无人机,是新型无人机。它能够通过高分辨率图像和视觉算法来分析和识别地面上的目标物体,从而实现无人机的自主导航和目标跟踪。目前,一些传统的无人机反制技术并不能很好的去反制视觉导航型无人机,国内外缺乏针对该类型无人机反制技术的研究,急需研究出新的反制技术来限制该类型无人机。
一、视觉导航型无人机介绍
(一)视觉导航型无人机给公安工作带来的威胁与挑战
视觉导航型无人机的出现给公安机关反制无人机工作带来了很大的困扰,其利用视觉导航的方式不同于传统的卫星信号/人工遥控导航方式,与传统无人机相比,它的设计理念、设计思路、设计程序决定了它更加智能化,能够在更复杂的环境中自主执行更多任务,具有其它类型无人机不可比拟的优势。依靠视觉自主导航是未来无人机的发展目标,也是当前的发展趋势。视觉导航型无人机作为无人机技术前沿,未来会大规模部署应用。公安机关在重大活动及重要会议的警卫安保中,必须尽快拿出反制手段查处打击利用视觉导航型无人机进行的恐怖袭击或制造政治事端等一系列违法犯罪活动。
(二)现阶段无人机警用反制装备
现阶段,公安系统中已经有各种类型的无人机反制装备[3],包括雷射干扰系统、无人机反制枪和无人机抓捕装置等。雷射干扰系统通过发射激光束剥夺无人机的导航和通信能力,将其迫降或迫使其返回起飞点。无人机反制枪则利用强大的电磁信号来干扰无人机的通信和导航系统。无人机抓捕装置通过发射网和其它机械装置将无人机迅速捕获并控制。
然而,随着无人机技术的不断演进,迅猛发展,无人机反制技术也需要不断升级和改进。特别是视觉导航型无人机,体积小巧、速度快、敏捷性高,且能够自主避开障碍物,甚至可以自主导航,不依赖于卫星信号或人工遥控,实现目标智能跟踪,航迹自主规划等。现阶段一些通过破坏无人机通信链路,干扰卫星信号等反制手段在面对该类型无人机时可能会失效,是现阶段无人机反制工作的潜在威胁和漏洞。
二、视觉导航型无人机相关技术剖析
目前,视觉导航按照是否需要导航地图(即数字景象基准数据库)可分为地图型导航[4]和无地图导航。地图型导航需要使用预先存储包含精确地理信息的导航地图,利用每一帧实拍图像与导航地图匹配即可实现飞行器的绝对定位。当导航地图采用景象图或地形图时,地图导航可分为景象匹配导航和地形匹配导航。由于景象匹配制导的精度比地形匹配制导的精度高一个数量级,因此地形匹配制导一般用于中制导,景象匹配制导一般用于末制导。在具体技术实现方面可分为以下三类:
第一类为组合导航。无人机除了有视觉传感器外还有惯性导航系统,但惯性导航器件具有累积误差,为了弥补以上的缺陷,依靠视觉所提供的实时信息可以将视觉信息和惯性导航信息进行融合,以提高导航精度,视觉惯性视觉里程计就是视觉惯性组合导航的一种经典方法。
第二类为基于深度学习。随着深度学习在图像处理[5]方面的发展成熟,深度学习广泛地应用于视觉SLAM 领域,目前主要有两个方向,分别是用神经网络的方法替换SLAM算法框架中的某个过程模块;或利用深度学习对语义地图的标签进行训练。
第三类为缓解特征依赖。目前,无人机视觉自主导航方法最大的局限就是对场景特征的依赖,会对无人机的算力和续航在成巨大的消耗,当环境特征不足或无人机运动引起图像模糊时,视觉导航信息则会起到反向作用。当前多采用的是直接法,即对像素直接操作,这样可减少对特征的依赖,还可以直接构建出半稠密或稠密地图提供给到后续的处理过程。
图1 为无人机视觉导航系统运行流程图,系统在运行时是一个不断获得图像进行处理的动态过程,对相机采集的图像进行图像处理,同时从惯性测量单元获得数据,融合多渠道获取的数据,进行视觉导航定位,输出定位结果。
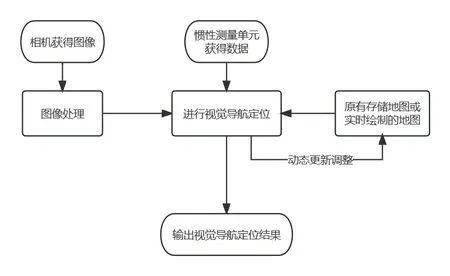
图1 :视觉导航定位流程图
三、反制方法
通过对以上视觉导航型无人机相关技术的剖析得到视觉导航型无人机功能的实现以机器视觉为核心,这是与传统无人机相比最为显著的特征,在反制技术研究中须针对这一特点进行针对性反制。
机器视觉系统是指利用机器替代人眼做出各种测量和判断。机器视觉是工程领域和科学领域中一个非常重要的研究领域,它是一门涉及光学、机械、计算机、模式识别、图像处理、人工智能、信号处理以及光电一体化等多个领域的综合性学科。视觉导航型无人机干扰因素主要有以下六种:
第一种为光照。机器视觉检测的效果会受到光照的影响,外界光照会影响照射在被测物体上的总光强,增加图像数据输出的噪声。
第二种为温度。温度变化也会影响机器视觉检测的效果。相机在出厂时都会标志正常工作的温度范围,大多数工业相机可以在-5℃到65℃之间工作,过冷或者过热都会影响相机的正常与运行。但在反制过程中,很难人为去改变无人机的相机温度。
第三种为灰尘。相机沾灰、脏污,肯定会对最终的成像有所影响。对于机器视觉检测而言,即使是非常微小的差异,也是值得重视的。尤其是传感器进灰,照片上就会形成暗区。在实战中,若用灰尘干扰无人机难度较大。
第四种为湿度。空气太潮湿,LED 或镜头上附着水蒸气,成像就受到影响。利用空气湿度影响,可以使用高压水枪射向无人机来进行干扰,但操作难度较大,且对无人机与地面距离有一定要求,超出高压水枪攻击范围后很难干扰。
第五种为振动。振动可能会导致图像模糊和失真。如今,无人机厂商在应对机身相机振动问题时,解决方案较多,故在反制过程中不宜采用该方法。
第六种为电磁干扰。工业相机属于图像传感器类,大多数器件都是弱电工作,极易受到电磁干扰的影响。因此,可采用无人机反制枪对其进行强电磁干扰。
经过对以上干扰因素的分析比较,在将其转化为反制方法后,考虑到反制方法的可行性、易用性、经济性,其中利用强光干扰或电磁干扰最有效。
(一)利用强光反制
视觉导航易受光照干扰,机身搭载相机在受到强光干扰下可能会出现以下五种情况:
第一种情况为图像过曝。强光照射会使得摄像头感光元件(如CMOS 或CCD)的感光度过高,导致图像过曝。过曝的图像中,亮部细节丢失,造成无法正确分析和处理。
第二种情况为对比度降低。强光照射会使图像中亮部的像素值过高,暗部的像素值过低,导致图像的对比度降低。这将影响机器视觉系统对物体的边缘、纹理、形状等特征的提取和分析。
第三种情况为高光点干扰。强光照射下,摄像头镜头表面的反射会形成高光点,这些高光点可能对图像中的其他细节造成遮挡或干扰,使得机器视觉系统难以正确识别和跟踪物体。
第四种情况为阴影效应。强光照射下,物体周围可能会产生明显的阴影效应,这些阴影可能会对物体的边缘和形状造成变形或干扰,从而影响机器视觉系统对物体的识别和分析。
第五种情况为颜色失真。强光照射会导致图像中的颜色出现失真,特别是在高亮度区域。这将对机器视觉系统中基于颜色的物体识别和分割造成困难。
光照对计算机视觉的影响是很大的。首先,在图像检索和识别中,不同光照条件下拍摄的图片可能存在颜色的相似度问题。由于颜色的相似度与光照有着密切关系,因此常常需要对颜色进行校正以消除光照带来的影响。其次,在物体识别和检测中,光照也会极大地影响物体的外观和形态,检测和识别的效果可能会较差。
利用强光源持续照射或者闪烁的强光照射无人机相机或其他视觉导航设备上。从而使无人机视觉系统在短时间内出现识别不精准,识别有误差,监测目标无人机是否受到干扰,例如观察无人机是否改变飞行方向或姿态。如果干扰成功,可以持续干扰目标无人机,直到目标无人机无法继续导航或离开区域,达到反制目的。
(二)电磁反制
视觉导航型无人机系统在运行使用中, 大都要通过相机/机载传感器获取各类型数据,若实施电磁干扰[6], 将使无人机的机载测控设备受到影响甚至失灵, 更有望达到反无人机的作战效果。
部分无人机具有一定的抗电磁[7]干扰能力,摄像头是无人机抗电磁干扰的短板。且视觉导航型无人机配备了多个摄像头,通过对机身搭载的摄像头[8]实施干扰,使无人机无法正常获得图像,从而使无人机失去视觉导航功能,达到反制无人机的目的。以下是摄像头在遭受不同频率电磁干扰时的故障表现:
1.工频干扰
干扰现象:图像出现雪花噪点、网纹或横条滚动带。
2.低频干扰(几十kHz)
干扰现象:图像出现静止水平条纹。
3.高频干扰(几十MHz)
干扰现象:图像出现雪花噪点或高亮点。
4.空间电磁辐射干扰
干扰现象:图像出现较密的斜型网纹,严重时会淹没图像。
尽管一些无人机具备一定的抗干扰能力,但在强大电磁干扰下无人机仍然很脆弱。通过电磁枪向无人机发射电磁脉冲,干扰摄像头成像,破坏机身电子设备,以此达到反制无人机的目的。
四、结语
综上所述,为了应对视觉导航型无人机的威胁,必须针对性地进行反制。首先,使用强光干扰技术是一种有效的、针对性强的反制手段。向无人机发射强光,干扰其光学传感器和相机,使其无法正确地获取周围环境的图像信息。这样一来,无人机就无法进行准确的飞行和导航,从而降低了其威胁程度。其次,使用电磁干扰技术也是阻止视觉导航型无人机的一种有效方法。通过发射特定频率的电磁波,可以对无人机的视觉系统造成损坏,使其迷失方向或无法获取导航信息,从而无法执行预定任务。另外,传统的声波干扰技术在面对此类型无人机时依然有效。在实战中,往往无法预先得知无人机类型,使用声波干扰技术可以有效应对潜在威胁。
除了上述的反制措施外,还可以通过法律和政策的手段来加强对视觉导航型无人机的管理。政府可以出台相关法规,规定无人机的使用范围和限制,并对违规使用的无人机进行处罚。此外,加强与其他国家和组织的合作也是必要的,通过制定国际标准和共享情报信息,共同应对无人机威胁。只有不断探索创新,并采取多种手段综合应对,才能有效地防范和反制视觉导航型无人机的威胁。中国军转民
猜你喜欢
中国机械工程(2022年8期)2022-05-09
中国机械工程(2021年8期)2021-05-07
长江丛刊(2020年13期)2020-11-19
红领巾·探索(2020年5期)2020-05-19
婚姻与家庭·婚姻情感版(2019年6期)2019-06-03
音乐教育与创作(2019年8期)2019-05-16
小学科学(学生版)(2018年9期)2018-09-21
家教世界(2017年11期)2018-01-03
英语学习(2015年2期)2016-01-30
机电信息(2014年17期)2014-02-27