基于内嵌物理知识卷积神经网络的电力系统暂态稳定评估
2024-05-18 09:00张理寅李更丰别朝红
电力系统自动化 2024年9期
陆 旭,张理寅,李更丰,别朝红,段 超
(西安交通大学电气工程学院,陕西省西安市 710049)
0 引言
新能源大规模发展是电力系统低碳转型的基本路径,也是实现“碳达峰·碳中和”目标的必经之路。2022 年,中国的风电、光伏发电新增装机容量突破120 MW,发电量首次突破1 TW·h,占全社会用电量的13.8%,接近全国城乡居民生活用电量[1]。随着新型电力系统发展,新能源渗透率将进一步提高,新型电力系统不仅需要面临大规模新能源“波动性、随机性”带来的源荷平衡问题,更要面临低惯量新能源机组代替常规机组后导致的暂态稳定问题[2-3]。
电力系统暂态稳定性(即受到大干扰后各发电机保持同步运行并过渡到新的或恢复到原来稳定运行状态的能力)是维持系统安全稳定运行的基础保障,也是进行系统运行决策的重要依据[4-5]。以风电为例,大规模风电并网下,电源结构深度调整,电力系统暂态稳定性受风电渗透率、控制方式以及接入位置等因素影响[6],暂态特性机理相比传统多同步机系统变得更加复杂[7]。此外,风电的随机性和波动性使得系统运行方式灵活多变,典型运行方式与实际运行方式差异较大,传统面向典型运行方式进行安全稳定校核的方法面临挑战,暂态稳定性的快速评估更为重要[8]。因此,亟须提出考虑新能源接入的电力系统暂态稳定快速评估方法,将评估结果从典型运行方式快速迁移到实际运行方式,实现在线动态安全评价。
电力系统暂态稳定性分析方法主要包括时域仿真法与能量函数法。其中,时域仿真法物理含义明确,但计算量大、耗时长,难以满足在线评估要求;能量函数法能够高效地实现暂态稳定评估,但复杂电力系统的“能量函数”难以构造[9],广泛使用的单机-无穷大等效系统难以表征大量风电机组接入对系统暂态特性的影响。随着机器学习、人工智能技术及相量测量单元(phasor measurement unit,PMU)的快速普及,基于数据驱动的电力系统暂态评估技术得到迅速发展,其主要思路是将暂态稳定评估建模为分类问题,通过挖掘系统状态量与暂态稳定性之间的非线性映射关系,将系统状态分为稳定和不稳定两类,并通过“离线训练-在线预测”的模式实现电力系统暂态稳定的快速预测与评估[10]。堆叠自动编 码 器[11]、卷 积 神 经 网 络(convolutional neutral network,CNN)[12-14]、长短期记忆网络[15]、深度置信网络[16-17]、支持向量机[18-19]、深度强化学习[20]、量子机器学习[21]等机器学习算法的成功应用表明了数据驱动在电力系统暂态稳定评估领域的可行性与适用性。大量研究围绕数据增强[22-24]、关键特征提取[11,25]、分类精度提升[26]等方面展开。此外,文献[27-28]提出基于轨迹簇的暂态稳定评估方法,在解决响应信息不完全的问题上具有独特优势。现有研究普遍将数据驱动方法作为“黑盒模型”,这使模型的性能和可靠性受到限制,预测结果可能与实际物理结果相悖。少部分研究关注模型的可解释性。例如,文献[9]采取梯度加权类激活映射(gradientweighted class activation mapping,Grad-CAM)算法对卷积神经模型进行了可解释性分析,明确状态量在暂态评估中的重要度。多数研究并未深入考虑模型输出与输入之间本身具备的物理关系。电力系统运行数据是满足一定物理规律的,物理模型作为“先验知识”在机器学习模型构建和训练中能够发挥重要作用[29]。此外,现有研究往往依赖大量训练数据,学习结果与数据分布强相关,不能完整反映物理规律;同时,现有研究的模型仅输出稳定/失稳判断结果,无法为系统调控提供更丰富的信息支撑。因此,对于有物理模型但难以直接求解的问题,需要使用知识-数据混合驱动的方法。
近年来,知识-数据混合驱动方法的发展使机器学习在交叉学科应用方面有了新的突破,机器学习模型并不作为“黑盒模型”,而与实际物理模型有深入的融合,内嵌物理知识神经网络(physics informed neutral network,PINN)算法被广泛应用。PINN 的核心是通过物理定律或科学知识来指导深度神经网络(deep neural network,DNN)的架构设计、优化和模型训练,如特征数据处理、损失函数构建、参数权重设计等[30]。嵌入物理知识的机器学习模型具备以下优点:1)保证预测结果与物理结果的一致性,提高模型可靠性;2)能够提高模型可解释性;3)缩小神经网络权重的搜索空间,提高训练效率和收敛性。除此以外,基于神经网络自动微分机制(auto differential,AD)[31],PINN 能够自然嵌入由微分方程表示的物理模型,实现复杂非线性物理过程的刻画。例如,文献[32]通过PINN 模拟由Navier-Stokes 方程描述的粘性不可压缩流体运动过程。已有研究表明,PINN 在刻画电力系统的高度动态性和非线性的运行特性方面具有优势。文献[29]提出了通过PINN 进行电网稳定分析的基本框架,构建多个网络适应系统结构或参数发生变化的情况。文献[33]提出基于PINN 的多机系统状态估计方法。文献[34]在图注意力网络中加入配电网潮流约束,使模型能够适应配电网拓扑变化。文献[35]基于知识-数据混合驱动实现含储能多机系统对频率偏差的快速协同响应。
本文聚焦风电机组接入下电力系统暂态稳定评估,构建了内嵌物理知识卷积神经网络(physics informed convolutional neutral network,PI-CNN),实现了运行方式、网络拓扑变化下的暂态稳定快速评估。首先,分析了风电机组接入下多机系统暂态稳定问题的物理机理,通过动态导纳表征风电机组对系统暂态特性的影响,推导了风电机组接入下多机系统暂态稳定问题的数学解析表达,将风电机组接入下系统的物理特性内嵌至神经网络;其次,设计了面向暂态稳定分析的CNN,将原始高维拓扑空间映射到低维特征空间,解决特征数据的“维数灾”问题,能够实现评估结果从典型运行方式到实际运行方式快速迁移;最后,提出了基于PI-CNN 的暂态稳定评估方法,输出具有明确物理意义的发电机功角轨迹曲线,不仅可以根据稳定判据实现电力系统暂态稳定评估,还能够为运行方式的调整决策提供可解释性依据。通过IEEE 9 节点测试系统和IEEE 39 节点测试系统时域仿真数据进行了模型训练与验证,证明所提方法的有效性和准确性。
1 多机系统暂态稳定问题的物理模型
本章介绍了风电机组动态等效模型,并在此基础上推导能够嵌入神经网络的多机系统暂态稳定物理方程。
1.1 风电机组的动态等效模型
本文主要针对现阶段使用最广泛的双馈感应发电机(doubly-fed induction generator,DFIG),考虑大规模风电集中接入系统的情况,将由DFIG 组成的风电场等效为1 台DFIG。通常,DFIG 的转子侧通过背靠背变流器接入系统,本身不存在功角失稳问题,对系统暂态稳定的影响主要体现在输出功率的变化[36]。当转子侧变流器的控制策略采用电压定向矢量控制时,DFIG 输出功率主要与机端电压及转子侧电流相关[37]。由于DFIG 电流闭环控制器的时间常数远小于暂态稳定研究的时间尺度,可以忽略暂态过程中转子电流的恢复时间[6]。因此,在暂态过程中,DFIG 的输出功率主要受机端电压影响。
将暂态过程中DFIG 输出功率的变化等效为DFIG 与其他同步机之间互导纳的变化,即将DFIG等效为动态导纳[38],从而在多机系统暂态稳定分析中考虑风电机组接入的影响。以具有3 台同步发电机和1 台DFIG 的网络为例,如图1(a)所示。
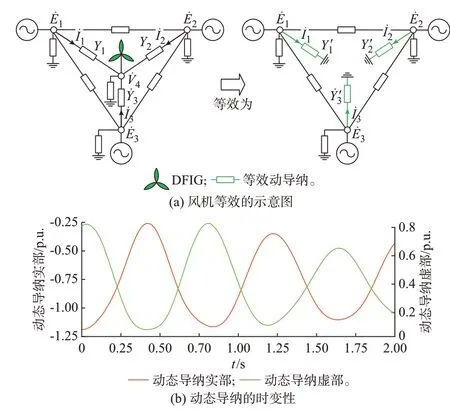
图1 风电机组的动态等效Fig.1 Dynamic equivalence of wind turbines
动态等效应保证等效前后风机对同步发电机的贡献电流(即各同步机的电流相量I˙1、I˙2和I˙3)保持不变,应与将风机等效为动态导纳前的相应值保持一致,则等效动态导纳的表达式为:
式中:E˙1、E˙2、E˙3为各同步机的暂态电势相量;V˙4为风机的机端电压相量;Y1、Y2、Y3为等效前风机与各同步机间的导纳;Y′1、Y′2、Y′3为风机与各同步机间的等效动态导纳。
在暂态过程中,假设风机的风速保持恒定[39],式(1)中等效导纳会随风机机端电压相量V˙=V∠θ和同步机暂态电势相量E˙=E∠δ的动态变化而变化,如图1(b)所示。其中,V为风机机端电压幅值;θ为风机机端电压相角;E为同步机暂态电势幅值;δ为同步机绝对功角。进一步得到:
式中:P为风机有功功率;Q为风机无功功率;I˙*为风机输出电流相量的共轭;fctrl(·)为描述风机控制方式的函数,本文考虑风机实现恒功率因数控制,表达式如式(5)所示。
式中:cosφ为恒定功率因数。
在动态相干性研究[40-41]中,一个相干组内节点电压相角的动力学相似,可以将非同步发电机节点附加到相关的同步发电机相干组中。因此,本文进行如下简化假设:风机机端电压相角近似为距离其电气距离最近的同步发电机功角δnearest[38],即
联立式(1)至式(6),可得风机动态导纳。
1.2 含风电的多机系统暂态稳定方程
考虑到暂态稳定问题重点关注状态变量,可以通过Kron 约化方法消去无源节点[42],然后根据风机的动态等效消去风机节点,最终可以将电力系统的微 分- 代 数 方 程(differential-algebraic equation,DAE)模型转换为等价的常微分方程(ordinary differential equation,ODE)模型。此过程能够缩减方程中的变量数,更加简洁地描述嵌入神经网络的物理知识。
将同步发电机和风机节点集分别记为S和W,记发电机节点集G=S∪W,非发电机节点集为Z;同时,同步发电机、风机和非发电机节点的个数分别记 为n=|S|、m=|W|和z=|Z|。本 文 同 步 发 电 机采用经典模型。电力系统网络方程为节点电压方程,即
式中:V和I分别为节点电压和注入电流向量;Y为节点导纳矩阵,进行如式(8)所示的分块切片。
式中:YSS、YSW、YSZ、YWS、YWW、YWZ、YZS、YZW、YZZ、YGG、YGZ、YZG为矩阵Y中由各节点集S、W、Z、G索引出的子矩阵。
负荷采用恒阻抗模型,可视为无源节点。通过Kron 约化方法消去节点集Z,得到只含发电机节点的约化矩阵为:
根据1.1 节所述方法,将风电场进行动态等效,可以进一步消去节点集W,表达式为:
式中:Y′为动态等效矩阵,大小为n×n;1m×1为m维元素全为1 的列向量;,,…,Y′n为虚拟动态导纳,与式(1)类似,动态导纳Y′i可通过式(11)计算得到。
进而,可得只保留同步发电机节点集合S的节点电压方程为:
式中:En和In分别为同步机暂态电势和输出电流的堆叠向量。
式中:Gii为矩阵Y′对角线元素实部;Yij和θij分别为矩阵Y′非对角线元素和其相角;ωs为系统参考电角速 度;Hi为 第i台 同 步 机 的 惯 性 系 数;Di为 第i台 同步机的阻尼系数;Pm,i为第i台同步机的机械功率;Ei和Ej分别为第i台和第j台同步机的暂态电势幅值;δi和δj分别为第i台和第j台同步机的绝对功角。
2 基于PI-CNN 的暂态稳定评估方法
2.1 总体框架
神经网络具有逼近任意连续函数的能力,本文提出一种内嵌物理知识神经网络,旨在找到能够近似满足式(14)的显式表达式。
式中:fNN(·)为神经网络的函数映射关系;绝对功角预测值δ^ 为定义的网络输出;δ0和ω0分别为功角初值和转速初值的堆叠向量;usp为给定的网络其余输入;和分别为第i台和第j台 同 步 机的绝对功角预测值;t0为初始时间。该神经网络刻画的显式表达式应具有较好的泛化能力,能够适应输入场景的变化,在给定场景下可以根据输入时间t输出该时刻对应的功角预测值。具体而言,取k1个时刻构成时间向量,与给定的δ0、ω0和usp广播后拼接作为神经网络的输入,便可以得到在该场景下k1个不同时刻的功角预测值。
所提的PI-CNN 总体框架如图2 所示,输入为系统参数、源荷场景、故障情况和时间t,输出为发电机故障后的功角轨迹曲线。网络为级联结构,分为特征提取部分和函数逼近部分。首先,将时间t分离,通过CNN 对其余特征进行特征变换、提取与降维;随后,将CNN 的输出和时间t拼接,输入PINN并进行函数逼近;最后,输出所有同步发电机的功角轨迹,再根据功角轨迹进行暂态稳定判断。同步发电机功角分别由数据驱动和物理约束两部分进行训练,其中,数据驱动即通过监督学习的方式,将功角真实值和预测值的误差反向传播,修正网络参数;物理约束部分将功角及其自动微分结果代入推导的物理知识表达式(13),再将等式两端偏差进行反向传播。下面将进一步阐述特征提取部分和函数逼近部分的原理和结构。
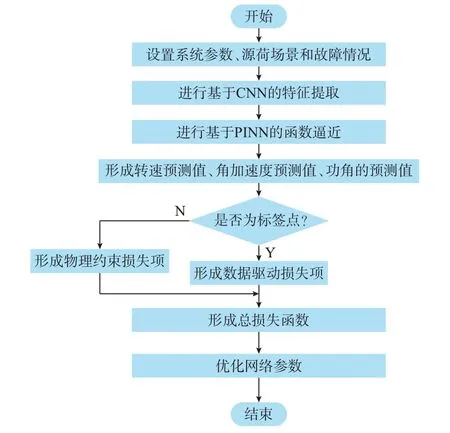
图2 PI-CNN 总体框架Fig.2 Overall framework of PI-CNN
2.2 基于CNN 的特征提取
为使网络具有良好的泛化能力,应保证网络能够适应大部分的场景变化,其中,场景指的是初值条件(例如,状态变量的初值、机械功率和暂态电势等)和扰动情况(例如,故障点、故障类型和故障切除操作等)的组合。由于扰动情况是组合问题,当系统规模扩大时会陷入“维数灾”,且使用离散编码难以准确区分不同场景之间的独特性。因此,需要对输入参数进行特征提取,在控制输入参数规模的同时,保留不同场景之间的独特性。
不同场景的独特性主要体现在故障位置、故障类型、故障切除时间等扰动情况。注意到,扰动情况实际上导致了电网拓扑结构和边权值的变化,最终影响的实际是约化矩阵。此时,网络原始输入需要包含约化矩阵,所以输入特征的数量级为O[(n+m)2],其中,O(·)为表示复杂度的渐进上界符;n和m分别为同步机和风机的个数。若不对输出参数进行特征提取和降维,则会使得优化的目标函数性态不佳,具有很多驻点,以致网络的训练过程难以收敛或容易陷入局部最优。
考虑到CNN 不需要人工提取特征,可利用数据之间的相关性自动完成特征提取过程,所以引入CNN 对多维输入提取特征。此外,由于数据格式与CNN 常见的多通道图像数据具有一定差别,需专门设计其输入数据格式和模型结构。本文构建的CNN 结构见附录B 图B1。用于进行暂态稳定评估特征提取的输入包括同步机功角初值向量δ0,转速初值向量ω0、机械功率Pm、暂态电势En和约化矩阵等。在输入网络之前需要人为进行特征构造,注意到物理知识表达式(13)中动态等效矩阵Y′元素和暂态电势呈交叉项出现,其中,动态等效矩阵Y′和约化矩阵只有对角线元素不同,表达式为:
据此,可以构造出特征表达式为:
其物理意义为同步机机械功率与固有电磁功率(机端所挂电阻)的差值。还可以构造出同步机间传输功率的系数特征为:
进一步,结合同步机功角初值向量δ0、转速初值向量ω0等独立特征一起作为网络的输入。CNN 中的二维卷积操作可以公式化为:
式中:*为卷积运算;X(l-1)为第l-1 层的输出;Xi′,(l)为 第i′个 卷 积 核Ki′,(l)映 射 出 的 第l层 特 征;bi′,(l)为 偏置;f(·)为激活函数,一般可以选为Tanh 函数,能够引入非线性因素,提升网络的表达能力。
考虑到导纳矩阵的物理意义及元素的相关性,如果直接将输入向量重塑为二维张量并作为卷积层的输入,可能会损失全局信息,所以本文在卷积层前首先进行特征变换,隐含全局信息。不失一般性,以约化矩阵为例,可以认为X(l-1)为矩阵Yˉ,则卷积操作实质是各卷积核Ki′,(l)沿输入特征X(l-1)的宽高维度滑动平移,每一步对相应局部窗口的元素进行加权求和,再经过f(·)进行非线性映射提取特征。然而,Kron 约化后的所有发电机两两相连,此时不论是卷积还是空洞卷积,卷积核Ki′,(l)都无法一次提取某发电机相连的其余发电机信息,如附录B 图B2所示,只能包含此发电机邻域信息,但是矩阵Yˉ某节点与其相邻节点之间的互导纳并不一定更大,即电气距离不一定更近,此时即丢失了全局信息。虽然在多层卷积之后,CNN 的感受野可以向后涵盖初始输入的全局信息,但是固然降低了导纳矩阵中排布相距较远节点之间的权重,而这并不意味着该节点之间实际电气距离就更远,则导致特征提取效果变差。
因此,所有输入向量先经过一个全连接层,并被tanh 函数激活,完成特征升维变换后,将数据重塑为多通道矩阵作为CNN 的输入,表达式为:
式中:X(0)和X(1)分别为第1 层的输入和输出;W(1)和b(1)分别为第1 层的权重系数和偏置;fTanh(·)为双曲正 切 函 数;Xi′,(2)为 第i′个 卷 积 核Ki′,(2)映 射 出 的 第2层 特 征;Ki′,(2)和bi′,(2)分 别 为 第2 层 的 第i′个 卷 积 核和偏置;Xreshape,(1)为经过重塑后的第1 层输出。
此时,X(1)中每个元素都是输入向量X(0)的加权求和,即隐含了全局信息,这样在对X(1)某元素的邻域进行卷积操作时,类似于注意力机制,模型将关注X(0)中作用较大的元素,自动调整分配权重,从而能够从X(1)的局部信息获取输入向量X(0)的全局信息,保证后续特征提取效率。
然后,设计多个卷积层、激活层和池化层,遵循通道数逐层增多但单通道尺寸逐渐减少的原则,用于发现更多隐式“规则”。最后,将CNN 的输出经过全连接层,神经元数量可以遵循逐层递减的原则,完成特征的降维,应保证最终输出维度在[O(1),O(n+m)]之间,一般小于等于系统同步机与风机的个数和。
本文提出的面向暂态稳定评估特征提取的CNN 结构,最显著优点是可以自动提取扰动变化特征,有利于后续函数逼近部分的性能提升以及网络整体的收敛效果。
2.3 基于PINN 的函数逼近
根据通用逼近定理[44],神经网络在理论上可以近似任何函数。然而,传统的神经网络忽略了物理规律,往往需要大规模训练数据集,同时可解释性较差。与之相比,PINN 能够将电力系统的DAE 直接纳入神经网络训练,结合第一性原理模型进行学习,并非仅依赖外部的训练数据集,具有较好的可解释性。
本文PINN 结构如附录C 图C1 所示,将特征提取结果λ和时间t作为函数逼近的输入,定义网络输出为t时刻的绝对功角预测向量。通过自动微分机制,使用网络输出对输入时间t求导,得到转速预 测 向 量=d/dt和 角 加 速 度 预 测 向 量=d2/dt2。其中,自动微分机制是反向传播算法的一般化,它基于复合函数链式求导法则,将神经网络的计算图分解为根节点(网络输出)、子节点(中间函数)和叶子节点(网络输入),根据节点间的有向关系计算任意两个节点之间的符号导数,既快速,又避免了数值求导引入的截断或舍入误差。PINN 能够通过评估神经网络本身与物理知识方程式(13)的匹配程度,来完成参数更新。具体而言,如果将式(13)右端项记为fi(t(k),k),u(k)),则通过等式失配量可以产生由物理知识引导的损失项Lf为:
在fi(t(k),k),u(k))中,主要有两部分需要使用网络 输 出,除cos(θij-+)可 以 直 接 计 算 外,Gii()将涉及对风机动态导纳的求解。在训练的每一步把网络输出k)回代式(2)至式(6),根据控制措施,利用解析法或数值法即可求解出该步的,进而结合式(10)和式(11)得到对应于网络输出k)的Gii()k)。此外,PINN 输出可以做进一步修正,使其修正值′严格满足初值条件,即
根据柯西-利普希茨定理,如果初值修正后的Lf=0,则能够实现无监督学习解ODE,并且可以保证解的唯一性。然而,仅通过Lf训练PINN 难以产生令人满意的结果,通常需要附加常规的数据驱动损失项Lδ,即以有监督的方式确定神经网络参数,表达式为:
式 中:δi,(k′)和,(k′)分别为第′个标 签 点 处 所 对应的功角真实值和预测值;Nx为标签点个数。标签点能够提供各种输入值对应的功角真实值为(t(k′),δ0,(k′),ω0,(k′),u(k′))→δ(k′),其 中,t(k′)、δ0,(k′)、ω0,(k′)、u(k′)为第k′个标签点处所对应的网络输入,δ(k′)为第k′个标签点处所对应的功角真实值向量。
一般来说Nx远小于Nf,所提方法具有低数据量特点。通过这样的设计,可以保证PI-CNN 的输出结果符合物理知识,一方面明显缩小了网络参数的搜索空间,另一方面使网络输出具有可解释性。其次,对于基于数据驱动的神经网络,在许多情况下,训练数据难以获取或者获取的成本很高,且输出结果的可靠性很难保证,容易产生在物理上不可行的结果。所以,PI-CNN 通过降低对于数据的依赖性,增强物理知识的引导,可以提高网络输出的置信度及其泛化能力。
采样点和标签点的分布情况见附录C 图C2,PINN 函数逼近的具体过程为:在训练开始阶段,网络输出自身在采样点处不满足式(13)刻画的物理知识约束,同时,其在标签点处与真实值之间一般也存在较大偏差,以上两部分偏差各自构成物理约束损失项和数据驱动损失项;优化器在训练过程中会将两者反向传播以逐渐修正网络参数,其中,密集的采样点可以从局部来约束网络的输出,而分散的标签点可以从整体上保证网络的输出符合真实值轨迹;最终,在两个损失项都趋近于0 后,网络实现收敛,此时网络输出满足物理约束,具备较好的可解释性。
最后,分别对损失项式(22)和式(24)赋以权重wf、wδ,得到总的损失函数Lsum为:
训练过程可以表示为:
式中:θ为CNN 中的参数。算法流程见附录D图D1。
2.4 基于PI-CNN 的暂态稳定评估
本文主要关注第一摇摆周期系统的稳定性,可以取最大仿真时间tmax∈[1.0,1.5]s。暂态稳定时域仿真法一般根据功角曲线振荡趋势或一定时间窗口内最大相对功角差进行暂态稳定判断。最大相对功角差在不同文献中有不同的取值,在本文中采用任意2 台发电机转子间的相对摇摆角超过180°作为系统失稳的判据。
在PI-CNN 进行暂态稳定评估时,即模型应用(预测)阶段,以故障持续(时段Ⅱ)和故障切除后(时段Ⅲ)两时段为例(见附录D 图D2),PI-CNN 的评估流程如下:首先,在时段Ⅱ通过状态估计或潮流计算获取故障发生(t0=0)前系统的运行状态,得到网络所需输入功角初值向量δ|t=t0、转速初值向量ω|t=t0、机械功率Pm和暂态电势En,利用1.2 节所述方法得到故障发生后的约化矩阵|t=t+0,进而能够根据2.2 节方法构造出网络所需特征输入Pm,i-ii|t=t0+和Ei Ej|||t=t+0,可以选择让PI-CNN 直接输出故障切除时(t1)各同步机的功角t=t-1,进一步通过自动微分机制输出各同步机的转速|t=t-1;故障切除后,在这一时段(时段Ⅲ)系统是自治的,式(13)右端并不显含t,即与时间t无关,可以直接置t1=0,然后,将前一步输出的t=t-1和|t=t-1作为网络的状态变量初值输入,故障切除操作导致系统拓扑结构发生变化,需要更新约化矩阵|t=t+1,并 构 造 网 络 所 需 特 征 输 入Pm,i-E|t=t+1和Ei Ej|||t=t+1,进一步将感兴趣的时刻组成时间向量,输入PI-CNN 即可得到故障切除后各发电机在不同时刻功角值组成的功角轨迹。最终,根据转子间的相对摇摆角判断系统是否失稳。
事实上,在系统遭遇干扰后的整个暂态过程中,式(13)在任意时段内都是自治的,非自治因素来自不同时刻发生的故障/操作,且大部分可以反映在约化矩阵Yˉ的变化中。所以,PI-CNN 实际针对每一时段内的自治系统进行训练,时间t都是从0 开始计时,故障、故障切除、重合闸等操作都可以归结到网络输入u中,PI-CNN 需要针对典型场景进行训练。在暂态稳定评估中,模型采取分时段应用策略,只需要根据故障/操作的时序过程,取前一个故障/操作时段PI-CNN 输出的状态变量末值,输入给后一个故障/操作时段的PI-CNN 作为状态变量初值,并根据故障/操作更新网络输入u,即可完成各时段的功角预测。
3 算例分析
本章主要针对2 个不同规模的典型系统进行研究,即IEEE 3 机9 节点系统和IEEE 10 机39 节点系统。使用仿真软件DIgSILENT PowerFactory 生成暂态分析数据样本。本文中的神经网络使用PyTorch[45]深度学习框架来实现并完成测试。所有测试均在搭载GeForce RTX 3080 Ti GPU、AMD Ryzen 9 5900X CPU、32 GB RAM 的台式计算机上完成。
3.1 IEEE 9 节点测试系统
采用DIgSILENT PowerFactory 软件生成IEEE 9 节点测试系统暂态分析数据。其中,同步发电机采用经典模型,负荷采用恒阻抗模型,异步DFIG 采 用 DIgSILENT PowerFactory 预 设 的DFIG 2 MW 模型,工作在恒功率因数控制模式。将并联10 台DFIG 的风电场集中接入节点4,含DFIG 的IEEE 9 节点测试系统接线图见附录E图E1。
设置故障类型为三相短路,故障发生的起始时间为0,仿真时长为3 s,仿真步长为0.01 s,切除策略为切除故障所在线路。不同场景设置如下:负荷水平在48 点日负荷曲线中随机选取;发电机出力根据负荷水平设置;故障线路在线路4-5、4-6、5-7、6-9、7-8、8-9 中随机选取,其中,故障点设置在线路首端或末端;故障切除时间变化范围为[0.08,0.30]s。
在上述条件下生成仿真样本,选取100 个场景,每个场景具有200 个步长,共20 000 条功角数据作为模型标签。其中,稳定场景为93 个,失稳场景为7 个。以线路5-7 首端故障为例,同步发电机功角、转速、电压及DFIG 的电压、功率输出变化如附录E 图E2 所示。故障发生后,同步发电机和DFIG机端电压跌落,故障切除后迅速回升。由于DFIG转子侧设置Crowbar 保护装置,其具有良好的低电压穿越特性。在恒功率因数控制下,DFIG 的输出功率在50 ms 以内即可恢复,可认为DFIG 的输出功率主要受机端电压影响,使用动态模型具有合理性。同步发电机转子转速和功角上升,在该场景下仍然同步运行。
所提PI-CNN 的网络参数设定如表1 所示。其中,Fc包含全连接层输入尺寸和输出尺寸参数;Conv和Pool分别包含卷积层和池化层的核尺寸、步幅、通道数等参数。
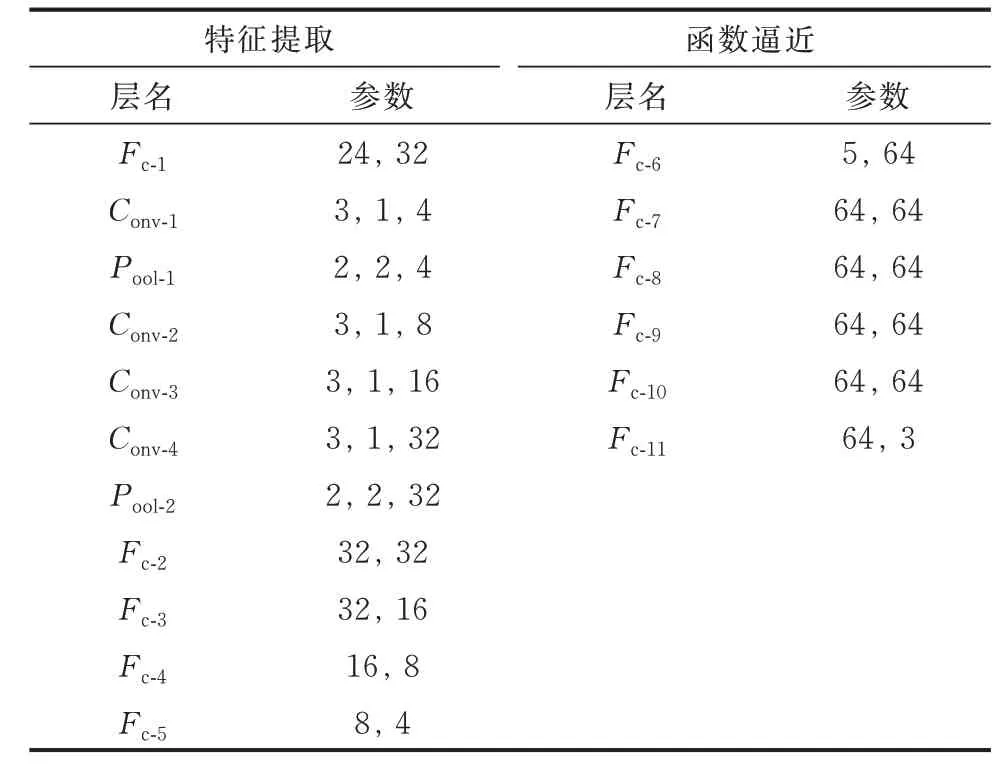
表1 神经网络参数Table 1 parameters of neural network
训练过程使用具有衰减学习率的Adam Optimizer[46],其中,初始学习率设定为0.002。总训练空间由100 个场景和200 个步长组成,时间粒度为0.01 s,场景输入域主要由故障线路、故障位置、状态变量初值和负荷水平的变化组合构成。
图3 展示了不同网络结构的损失函数随迭代次数的变化情况。为了便于对照各个网络结构的收敛效果,设定纵轴表示网络输出与全部训练数据的偏差,用均方误差(mean square error,MSE)来衡量。其中,PI-CNN 与PINN 的采样点使用全部训练空间,标签点仅使用总训练数据的5%,其他网络结构没有采样点,使用全部的训练数据作为标签。
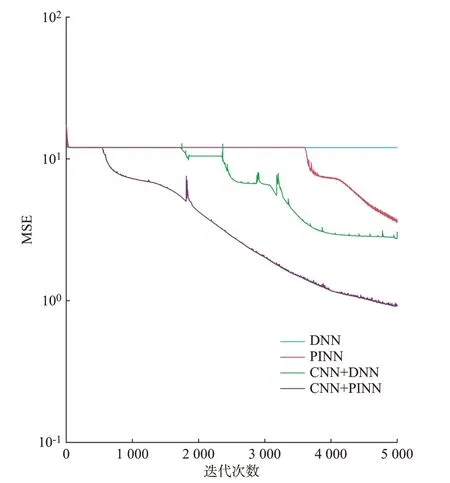
图3 不同方法的收敛情况Fig.3 Convergence of different algorithms
由图3 可知,只采用DNN 将长时间陷入局部最优,无法进一步收敛,提高网络性能可能需要输入更多的高质量数据点,这将取决于改进数据创建过程;单纯使用PINN,在训练初期产生了与DNN 类似的情况,但随着迭代的深入,损失能够进一步下降;CNN+DNN 能够明显提升收敛效率,在早期甚至能优于PINN,但是由于缺少了物理规律的嵌入,仍然无法避免过早收敛与振荡问题,同时可解释性也欠佳;只有所提CNN+PINN 方法才能进一步提高网络的性能,不仅可以迅速减少损失,而且可以继续训练过程以提高网络精度,并且由于物理规律的嵌入,不会存在可解释性与过拟合问题。
为了更加客观体现不同场景的误差情况,定义相对误差指标,即偏差面积与参考面积的比值,见附录E 图E3,并根据相对误差指标筛选出PI-CNN 最差的功角轨迹预测结果。传统数值积分中各环节误差可能会逐步累积放大,通过式(14)显式刻画的功角轨迹由于不存在逐步积分过程,所以即使某一时刻的预测值存在误差也不会向后积累,其他时刻的预测值基本不受干扰,再加之少量分散的真实值标签从整体上约束模型,一般只会出现局部误差情况,且可以通过增加训练迭代次数来进一步消除误差。在总训练空间中,面积的绝对误差均值为3.20×10-2,方差为4.30×10-4,相对误差均值为4.20×10-3,方差为7.74×10-6。
在暂态分析数据样本中,选取稳定场景和失稳场景,将其输入PI-CNN,得到不同场景下绝对功角和相对功角轨迹的预测结果,如图4(a)和图4(b)所示。显然,无论是稳定场景还是失稳场景,网络均能够保证较高的预测精度。其中,相对功角误差比绝对功角误差更明显,这是由纵轴分辨率不同导致的。在实际应用时,模型的故障信息可由动态安全评价中的预想事故集提供,模型的初值条件可以取自当前运行方式的状态估计或潮流计算。
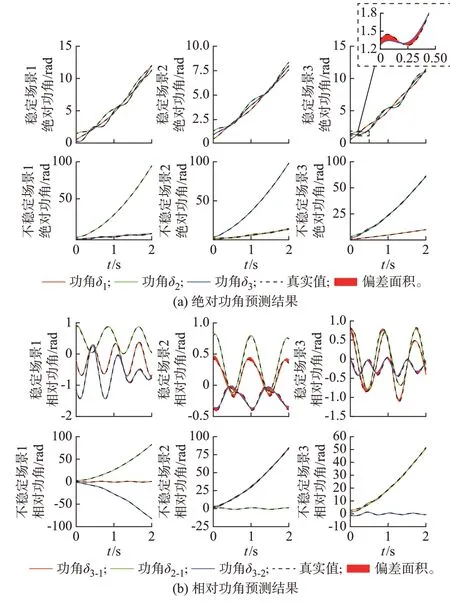
图4 IEEE 9 节点测试系统的功角预测结果Fig.4 Power angle prediction results of IEEE 9-bus test system
使用PI-CNN 进行暂态稳定分析的一个重要原因是可以显著提高评估的计算速度,这对于一些在线应用的优化或评估问题尤为关键。PI-CNN 能够将传统计算密集型的数值积分方法,转化为知识-数据空间控制规律,从而更容易嵌入这些问题。附录E 图E4 展示了PI-CNN 评估时的实耗时间与DIgSILENT PowerFactory 中实现的经典数值方法在不同仿真时间下的直接对比,与传统方法相比,PI-CNN 的速度快约1 000 倍,并且差距会随着仿真时间的增长而进一步扩大。
PI-CNN 耗时更短的原因在于输入只需要通过网络前向传播一次即可得到结果,即输出轨迹被表示成式(14)中的显式表达式。相比之下,数值积分方法需要逐步积分,直到达到所需的仿真时间,而积分次数取决于容差以及步长,该步长由解算器的数值稳定性决定。数值求解方法的计算代价很大程度上取决于非线性误差控制措施,需要较小的步长。
从复杂性分析的角度来看,PI-CNN 的评估时间仅取决于网络的大小,即层数和每层神经元的数量,对于精度水平,则可以由训练过程决定,在评估过程中不会改变。
在训练所使用的暂态仿真数据样本外,随机生成300 个测试场景使用PI-CNN 进行暂态稳定分析,最终结果如图5 所示。图中:圆形为稳定场景,三角形为失稳场景,星形为误报场景。由渐变色表示失稳场景与切除时间的关系,蓝色表示稳定,可以发现失稳场景大部分集中于测试空间右侧,直接反映了切除时间对于稳定性的影响。通过100 个场景中少量数据训练出的PI-CNN 会出现误报(稳定误判为不稳定)的情况,误报率为3.67%,但是不会出现漏报(不稳定误判为稳定)的情况,说明PI-CNN的整体性能偏于保守且鲁棒性较强。此现象可能由3 个因素导致:1)模型内嵌的物理方程往往具有输入敏感性;2)不稳定场景功角波动大,特征更显著;3)训练数据分布均匀。可以通过在稳定边界处提高训练数据密度[47]、增大训练空间和提高训练迭代次数的方法来实现更好的全局泛化能力及预测效果。
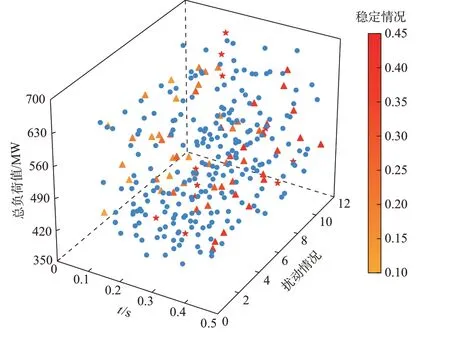
图5 暂态稳定评估结果Fig.5 Results of transient stability assessment
3.2 IEEE 39 节点测试系统
与IEEE 9 节点测试系统的仿真类似,采用DIgSILENT PowerFactory 软件生成IEEE 39 节点测试系统暂态分析数据。将风电场分别集中接入节点1 和节点16,并由等效DFIG 表示,通过仿真软件生成50 个场景和200 个时间步组合成的暂态分析数据样本,并取其中的5%作为标签点进行网络训练。含风机的IEEE 39 节点测试系统接线图见附录E 图E1。
通过扩大PI-CNN 的网络规模,具体而言,特征提取部分每层扩大1.5 倍,函数逼近部分每层扩大2 倍,含风机的39 节点系统同样能够较快地收敛,并拥有继续下降的潜力,可以继续训练过程以提高最终的预测精度,如附录E 图E5 所示。在当前的硬件配置下,扩大前的网络训练5 000 步耗时约15 min,扩大后的网络训练6 000 步耗时约40 min。通过对比训练时长可知,计算规模随系统规模的提升并不显著,从实践上来看,时间与空间复杂度大致处在多项式级别。
IEEE 39 节点系统不同场景下PI-CNN 的预测效果见附录E 图E6,对于大部分场景收敛后的PICNN 都拥有较强的拟合能力,但是少量波动较强的轨迹在初段和中段的逼近情况要略差于IEEE 9 节点系统的结果,这也可以反映本文所提的网络结构对于系统规模提升具有较强的适应能力。
4 结语
为提升数据驱动暂态稳定评估方法的可解释性与泛化能力,本文提出了一种基于内嵌物理知识卷积神经网络的电力系统暂态稳定评估方法,并验证了方法的有效性。
1)通过动态导纳表征风电机组对电力系统暂态特性的影响,推导了风电机组接入下电力系统暂态稳定问题的数学解析表达,形成可嵌入神经网络的物理知识方程。
2)针对输入场景的独特性与高维特性,提出了基于卷积神经网络的特征提取方法,将原始高维拓扑空间映射到低维特征空间,解决拓扑数据无法直接作为神经网络输入的问题,同时能够适应不同运行方式的变化。
3)提出了基于PI-CNN 的暂态稳定评估方法,输出具有明确物理意义的发电机功角轨迹曲线,再根据功角曲线进行暂态稳定评估。相比于传统基于分类的机器学习方法,所提方法直接模拟物理过程,输出更为丰富的故障动态信息,能够为运行方式的调整决策提供可解释性依据,在准确性、可解释性、泛化能力方面具有显著优势。
4)通过知识-数据双驱动的方式,所提方法能够不依赖大规模训练数据集,在仅使用5%标签数据的情况下,能够实现较好的预测效果。同时,由于增加物理知识约束,所提方法具有较好的收敛性。
后续将针对系统规模增长和故障场景增多情况下所提方法的泛化能力展开进一步研究。同时,若考虑更为复杂的发电机模型或控制模式,此时物理规律将出现不同量纲的微分方程,具体表现在损失函数中,网络的学习过程因为量纲的差异出现异质化,此时网络的收敛性也有待进一步研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
电气技术(2022年10期)2022-10-25
电力自动化设备(2022年8期)2022-08-09
大电机技术(2022年1期)2022-03-16
大电机技术(2021年5期)2021-11-04
防爆电机(2020年4期)2020-12-14
能源工程(2019年6期)2019-12-02
成都信息工程大学学报(2018年3期)2018-08-29
电子制作(2018年14期)2018-08-21
电子测试(2017年12期)2017-12-18
电子测试(2017年23期)2017-04-04