
基于FPGA的双目高精度宽波段激光告警系统
2024-05-17 11:57:06张卓奇牛家麒王志斌
计算机测量与控制 2024年4期
张卓奇,张 瑞,牛家麒,王志斌
(1.中北大学 仪器与电子学院,太原 030051;2.中北大学 山西省光电信息与仪器工程技术研究中心,太原 030051;3.中北大学 前沿交叉科学研究院,太原 030051)
0 引言
激光技术作为光电探测领域的重要分支,凭借其响应快,功率大,应用面广的特点,在军事领域中已经得到飞速的发展。20世纪以来,激光追踪、激光制导、激光雷达和激光作战卫星等激光武器已经相继应用到战场之中,激光武器已经成为各个国家军队竞赛的重要领域。因此,为了应对国际上日益严重的激光威胁,各国都在大力发展激光告警技术。激光告警系统是一种可以测得来袭激光方位角、俯仰角、光功率和波长等参数的军用告警设备,其可以对敌军武器进行实时监测和反侦察,也可以对我方的激光设备进行定期的精度和性能检测[1]。目前,激光告警系统主要装配在卫星雷达上,星载激光告警系统安装在易于受到反卫星激光武器攻击的部位,告警信号由星上数据处理系统快速分析与处理,判断激光武器的威胁程度,发送给卫星防护体系,并采取信号干扰、拦截和破坏等操作进行防御[2]。
现有的激光告警技术按成像原理主要分为散射探测型、光谱识别型和光栅衍射型[3]。散射探测型的激光告警系统结构简单,制作成本低,但是只能探测固定波长的激光,并且角度分辨率低;光谱识别型激光告警系统可以探测多波段的激光,但是其衍射效率低,角度分辨率低,并且搭建仪器较为复杂,成本较高;光栅衍射型激光告警系统凭借其测量精度高,探测波段广和制作成本低的优点,已经逐步将散射探测型和光谱识别型激光告警系统取代[4]。自从各国开始发展激光告警技术以来,激光告警系统逐渐朝着多波段,大视场范围和高精度的方向发展[5]。20世纪80年代初期,英国BAE公司研制的1220型激光告警机器,其探测光谱接受范围达到0.35~1.1 μm,俯仰角水平范围达到了-15~+40°,方位角水平范围达到了360°,测量角度分辨率为10°左右[6]。1998年,中国信阳空军第一航空学院基于CCD线阵探测器,研制了国内第一台激光告警机器,其角度分辨率达到1.5°,并且单个探测器的方位角视场范围达到120°。2010年,合肥电子工程学院设计出FPGA+DSP的激光告警装备,具有宽波段探测波长范围的优点。近几年,中北大学光电信息研究中心使用了面阵CCD探测器,解决了国内不能对俯仰角测量的问题,并且方位角视场范围达到±45°,俯仰角视场范围达到±35°,角度分辨率达到0.5°,自此国内激光告警技术逐渐走向成熟[7-10]。
随着激光技术在基本理论和材料工艺等方面的成熟,各国对激光告警的测量精度要求日益严格,传统的激光告警系统已经不能满足现代化战争的需求。光斑中心提取的准确与否决定了激光告警系统测量精度的好坏[11]。但是在实际应用中,由于探测器工艺生产过程中不可避免的缺陷与激光告警机器工作环境的复杂性,激光告警系统探测器的成像往往有噪点和非目标因素的干扰,这些干扰直接影响到光斑中心提取的准确性,进而影响到激光告警系统的测量精度,所以有效去除噪点和非目标因素的干扰,对激光告警系统测量的准确性至关重要[12-14]。
近年来常见的目标分割方法主要有:1)最大熵阈值分割,该方法是在保持图像均匀性的前提下,寻找最优的阈值来分割图像的方法,但是该方法对噪声比较敏感且计算量比较大,在激光告警系统的实际应用过程中不易分割出光斑与噪点[15],不适于光栅衍射型激光告警系统的成像特性;2)迭代阈值法,该方法是根据给定的阈值对图像进行二值化处理,不断调整阈值,直到最合适的图像位置,但是的计算速度较慢,不满足于激光告警的系统的实时性要求[16];3)边缘检测法,该方法主要是通过一阶导数算子或者二阶导数算子对图像做卷积来提取图像的边缘信息,该算法边缘检测较准,对噪声比较敏感,但是阈值的大小需要自己设定,自适应能力较差,不适用于激光告警系统工作时复杂变化的环境[17]。Otsu阈值分割算法具有自动选取阈值,处理速度快和适用范围广的优点。该算法不需要人工干预,在计算类间方差时,只需要计算一次灰度直方图,并且适用于各种复杂变换的环境。因此,Otsu算法满足高精度宽波段激光告警系统实时性和复杂环境下工作的需求。
针对现有激光告警系统提取精度差,测量角度分辨率低的问题,提出了基于FPGA与改进Otsu算法的高精度宽波段激光告警系统,对Otsu算法进行了推导和改进,并将改进后的Otsu算法与探测器的成像控制相结合,有效去除了噪点和非目标因素的干扰,提高了激光告警系统的测量精度,并将测量的来袭激光的参数通过RS422接口传输至上位机实时观看。
1 基本原理
高精度激光告警系统主要包括光学衍射模块,探测器控制模块、图像处理模块和数据传输模块。光学衍射模块是将来自被探测物体的光线集中到探测器芯片上,生成电信号并传输图像。探测器控制模块是通过FPGA控制探测器将光电信号转变为模拟信号。数据传输模块是基于AD芯片和RS422接口构成的通信传输系统。图像处理模块主要包括图像阈值分割模块。图像阈值分割模块基于Otsu算法,实现了自适应阈值控制,基于计算出的阈值,对探测器采集的图像进行二值化处理。系统基于处理后的图像,进行光斑中心坐标提取和角度计算。系统原理如图1所示。
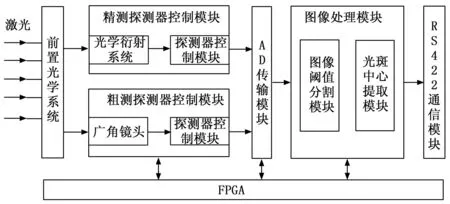
图1 激光告警原理图
1.1 光栅衍射型激光告警测量原理
系统使用两个InGaAs焦平面阵列探测器分别进行角度的精测和粗测,可以实现对波段为0.4~1.7 μm的可见与近红外光探测[18-19]。粗测模块仅仅使用了广角镜头,不使用光栅,计算出的角度为激光告警系统提供大致的方位角和俯仰角。
(1)
其中:x粗和y粗是粗测模块获得的光斑中心坐标,f粗是广角镜头的焦距。α粗和γ粗是粗测计算出的方位角和俯仰角,可以确定光斑衍射的级数。
精测模块使用宽波段大视场二维衍射光栅,利用多缝衍射原理将来袭激光根据不同的波段衍射成不同个数的光斑[20],通过计算最靠近成像中心的光斑坐标来计算出来袭激光的方位角和俯仰角。
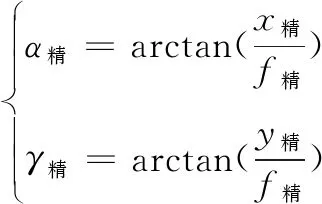
(2)
其中:x精和y精是经过宽波段二维衍射光栅衍射后离成像中心最近的光斑坐标,f精是带有光栅的镜头焦距,α精和γ精是精测计算出的方位角和俯仰角。
根据式(1)和式(2)可以计算出经过光栅衍射后光斑的衍射级数a和b:
(3)
其中:round是四舍五入的取整函数,d为光栅常数。由式(1)~(3)可以得到来袭激光的方位角、俯仰角和波长为:
(4)
式中,α和γ是激光告警系统真正测出的方位角和俯仰角,λ为测得来袭激光的波长。
1.2 Otsu算法原理
Otsu算法又称作最大类间方差法,是一种经典的非参数,无监督的自适应阈值选取法,该算法是通过计算一帧图像的灰度直方图信息,使目标因素和非目标因素的方差取得最大时的像素值作为分割图像的最佳阈值[21-22]。
传统Otsu算法的基本思想是:假设一副图像的灰度值范围是[L0,L1],灰度值为i,算法通过设置灰度值t把图像分为a0和a1两部分,则a0区域的灰度值取值范围为[L0,t],a1区域的灰度值取值范围为[t+1,L1]。则a0和a1的灰度概率为:
(5)
(6)
则这两个区域所有像素点的平均灰度值为:
(7)
(8)
由式(5)~(8)可得到传统的a0和a1类间方差表示为:
g=w0w1(u0-u1)2
(9)
满足式(9)取得最大时的阈值t,即为最大类间方差获得的最佳分割阈值:
t=Arg{max(g)},L0≤t≤L
(10)
但是传统的Otsu算法计算的阈值t,只考虑到类间方差的大小,没有考虑各类本身的内聚性,在目标区域和背景区域相差较大时,会导致图像得不到有效的分割[23]。为了对来袭激光衍射的光斑图进行有效的分割,引入了类内绝对差和类间差的比值作为阈值判别的依据,改进后的算法公式表示为:
g=w0w1|u0-u1|
(11)
(12)
σi=σ0+σ1
(13)
则新的最佳阈值判别函数为:
(14)
满足式(14)取得最大时的阈值t,即为改进后的Otsu算法的最佳分割阈值。
改进后的Otsu算法只需计算绝对值,而无需计算平方,降低了算法的复杂程度和计算量,并且采用了类内绝对差和类间离差的比值作为判别函数,使得目标和背景分类效果最优的同时,目标类内的内聚性也比较好,使得式(14)计算出的阈值更接近实际的最佳阈值。
2 双目高精度激光告警系统硬件设计
高精度激光告警系统硬件部分重点设计了InGaAs探测器驱动电路、RS422串口通信电路、模数转换电路和FPGA控制电路。
2.1 InGaAs探测器驱动电路设计
系统使用两个InGaAs焦平面阵列探测器分别进行角度的精测和粗测。其中LINE1 和DATAVALID端口为探测器第一行数据有效标志和行数据有效标志,由探测器向FPGA输入数据,FPGA通过端口的高低电平进行处理。SERDAT为探测器的串口数据输入端口,FPGA通过SPI通信协议向SERDAT端口输入寄存器组,以此来配置探测器的积分电容,输出通道控制和功耗控制等初始工作模式。INT为系统帧同步信号端口,由FPGA对端口进行控制,FPGA向探测器输入高电平时探测器进行数据处理,低电平时不进行数据处理工作,FPGA通过配置INT端口来配置探测器的积分读出工作模式。MC为探测器时钟端口,由FPGA向探测器输入工作时钟。VDDA和VDDA3为探测器的模拟电源,典型电压为3.3 V。SUBPV引脚为探测器的外部输入偏置电压,推荐电压为2.25~2.95 V。系统使TPS7A7002DDAR 电压基准芯片为SUBPV和VBLM供电。VLOG、VBP和VREF为探测器内部产生电压。
InGaAs焦平面阵列探测器的参数如表1所示,探测器驱动电路设计如图2所示。
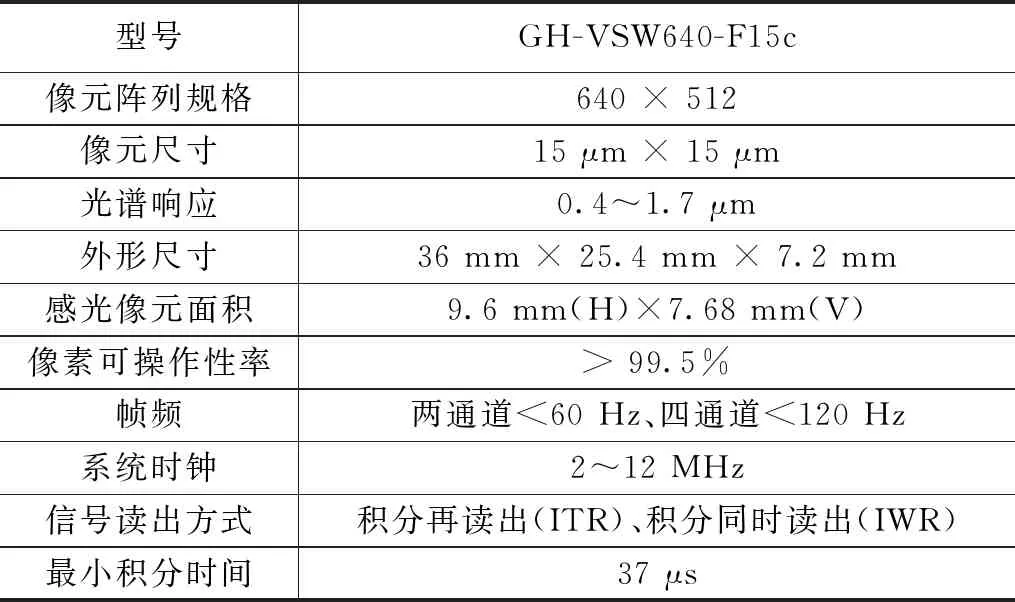
表1 面阵探测器主要参数
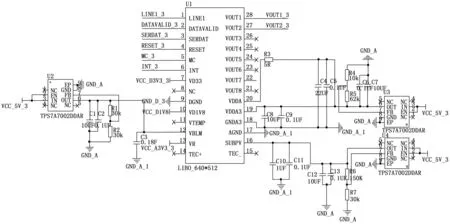
图2 InGaAs探测器驱动电路原理图
2.2 RS422串口通信电路设计
二维激光告警系统的接口模块使用了RS422串口通信电路,RS422是一系列规定采用4线,全双工,差分传输和多点通信的数据通信协议,具有传输速率高、传输速率远、不易受到干扰的特点[24]。电路使用了MAX3490ESA低功耗收发器,每个器件中都具有一个驱动器和一个接收器,可以减小电磁干扰,并降低由不恰当的终端匹配电缆引起的反射,实现最高250 kbps的无差错数据传输。其原理如图3所示,电路中MAX3490ESA收发芯片的工作电源为3.3 V,D2、D7、D8、D9、D10、D11均为瞬态抑制二极管,阻值设置为120 Ω,用于对接口的保护。
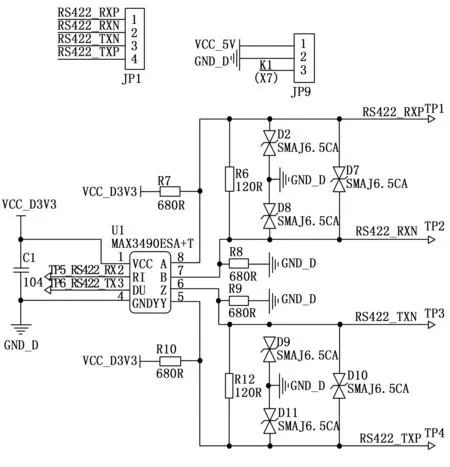
图3 RS422串口通信电路原理图
2.3 模数转换电路设计
激光告警系统具有高传输速度的要求,为了匹配InGaAs探测器最高8通道的模拟信号输出,系统设计选用了型号AD9288的模数转换芯片,该芯片拥有最高125 Msps的采样速率,可以满足激光告警系统的传输要求。为了保证探测器和AD芯片传输时的最大效率,在电路每个接地端口均放置了去耦电容,并将其差分端口INA+、INA-和INB+、INB-探测器输出端口相连接,以供FPGA进行数据读取。其电路设计如图4所示。
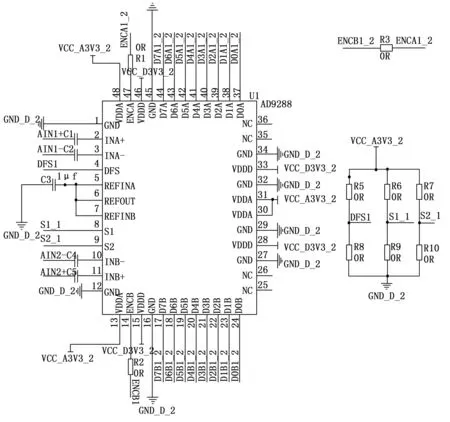
图4 AD9288模数转换芯片电路原理图
2.4 FPGA控制电路设计
激光告警系统主要通过FPGA进行探测器芯片控制、图像处理和数据传输。系统选用的FPGA控制芯片为Intel公司的EP4CE55F23I7N芯片,该芯片是一款架构先进、高性能、低功耗的FPGA。该芯片能够使用的IO引脚多达374个,芯片的逻辑单元高达55 000个,片内RAM的存储容量为2 340 kbit,满足激光告警系统的设计需求。FPGA控制器的输入电压由整机系统电源模块输出的5 V电压提供,随后需要将5 V电压转化为FPGA芯片内部I/O口需要的数字电源电压3.3 V、PLL锁相环需要的模拟电源电压2.5 V以及内核数字电源电压1.2 V。因此,系统选择使用电压精度芯片TLV62130完成3.3 V和1.2 V电压转换。FPGA控制电路如图5所示。

图5 FPGA控制电路
3 双目高精度激光告警系统软件设计
系统软件部分基于EP4CE55F23型号的FPGA芯片、Quartus Ⅱ开发环境和Verilo HDL编程语言,实现了InGaAs探测器控制、RS422串口通信、Otsu图像分割算法。
3.1 InGaAs探测器时序控制
FPGA芯片控制InGaAs探测器将来袭的激光信号转换为模拟信号,再通过AD芯片传输给FPGA处理。为了提高激光告警系统的采样频率,同时满足实时性的要求,使探测器工作在边积分边读取模式,这种工作模式下,InGaAS探测器在输出前一帧图像的同时,同时对当前帧信号进行积分处理操作,实现一边积分,同时一边读出的功能。每个信号读出的时间为一个时钟周期Tmc,帧周期近似等于读出时间,积分时间几乎和输出时间重叠。探测器工作流程如图6(a)所示,其各个端口的FPGA工作时序如图6(b)所示。
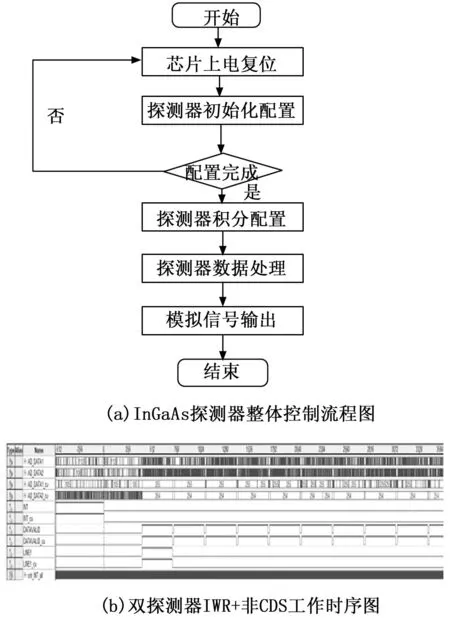
图6 InGaAs探测器逻辑控制图
3.2 Otsu算法图像分割
Otsu图像分割模块根据式(14)计算出的结果,调整最优阈值t,从而实现对探测器图像输出的阈值控制。阈值的大小通过FPGA的Otsu模块传到两个探测器的控制模块,并根据计算出来的t,将探测器输出的数据进行二值化处理:灰度值大于阈值的数据设置为1,灰度值小于阈值的数据设置为0。将处理后的光斑数据传输给图像处理模块,进行光斑中心坐标、来袭激光俯仰角和方位角的计算。其FPGA的RTL viewer如图7所示。
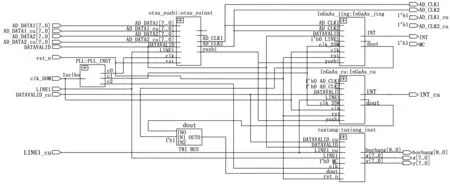
图7 激光告警系统RTL视图
3.3 RS422串口通信
基于RS422通用全双工收发传输器规定的设备之间传输的帧格式。FPGA向上位机模拟发送了8字节进行串口通信验证,发送的数据为:17 h、70 h、00 h、10 h、00 h、14 h、AAh和55 h,传输波特率设置为115 200波特,RS422串口通信的工作时序如图8所示。
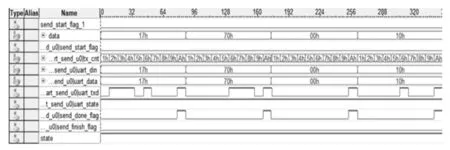
图8 RS422的工作时序图
4 实验结果分析
在上述理论研究和系统设计的基础上,基于实验室的光学平台和测试仪器,搭建的双目高精度激光告警系统实验装置如图9所示。

图9 双目高精度宽波段激光告警实验图
多波段激光器模拟523 nm、1 064 nm和1 550 nm的3种波段的来袭光源,作为激光告警系统测试的发射光源。高精度二维转台使激光告警系统在不同角度的光照射下,进行数据采集、标定和验证,并且转台转动精度达到0.01°。PC上位机通过RS422接口实时检测激光告警的测量数据。
4.1 探测器图像采集
在合适光照强度的照射下,用1 064 nm波段的模拟光源照射激光告警系统,将探测器采集到的光斑衍射图通过FPGA芯片和USB2.0通信协议传输至上位机实时观看。采集到的光斑如图10所示。
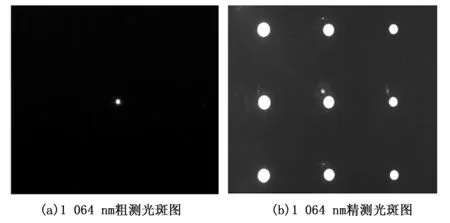
图10 不同波段激光采集
从图10中可以看出,探测器可以成功采集来袭激光的衍射光斑图,并且采集到的图像清晰无坏点,但是由于探测器工艺生产不可避免的缺陷,InGaAs探测器在成像过程中往往有噪点和盲元的干扰,并且由于光栅衍射效率的影响,在波长1 064 nm激光的照射下,精测光斑图像会有零级光斑衍射产生的光晕的干扰,这些噪点和光晕会影响后续对中心光斑的坐标计算,进而影响到激光告警系统对方位角和俯仰角等参数测量的准确性。
4.2 改进的Otsu算法验证
为了验证改进的Otsu算法的分割结果,基于MATLAB开发软件,分别用传统的阈值分割算法,传统的Otsu算法和改进的Otsu算法,对探测器采集的光斑图像进行阈值分割。3种不同方法的分割结果如图11所示。
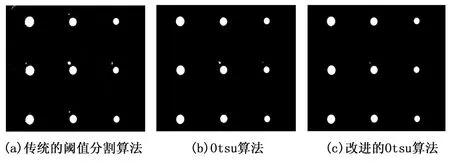
图11 光斑分割效果比较图
从图11不同算法的分割结果比较图可以看出,在1 064 nm的模拟光源照射下,传统的Otsu算法相对于传统的阈值分割算法,可以有效避免由于探测器工艺产生的噪点和无效像元的影响,但是零级光斑附近还是存在较大光晕的影响。相比于传统的阈值分割算法和Otsu算法,改进的Otsu算法不仅抑制了噪点和无效坏点的干扰,还可以有效抑制了衍射光晕的影响,提高了探测器的成像质量,为激光告警系统计算的准确性提供了一定的保障。
4.3 高精度激光告警系统验证
在有效抑制噪点和光晕的干扰后,为了验证激光告警系统的精度,通过转台调整激光告警系统的方向,使其在不同方位角和俯仰角的模拟激光照射下工作,通过灰度质心法,对传统阈值分割法下的光斑中心坐标和改进的Otsu法下的光斑中心坐标进行多次计算,并和理论光斑中心坐标进行对比,两种不同方法的对比结果如表2所示。
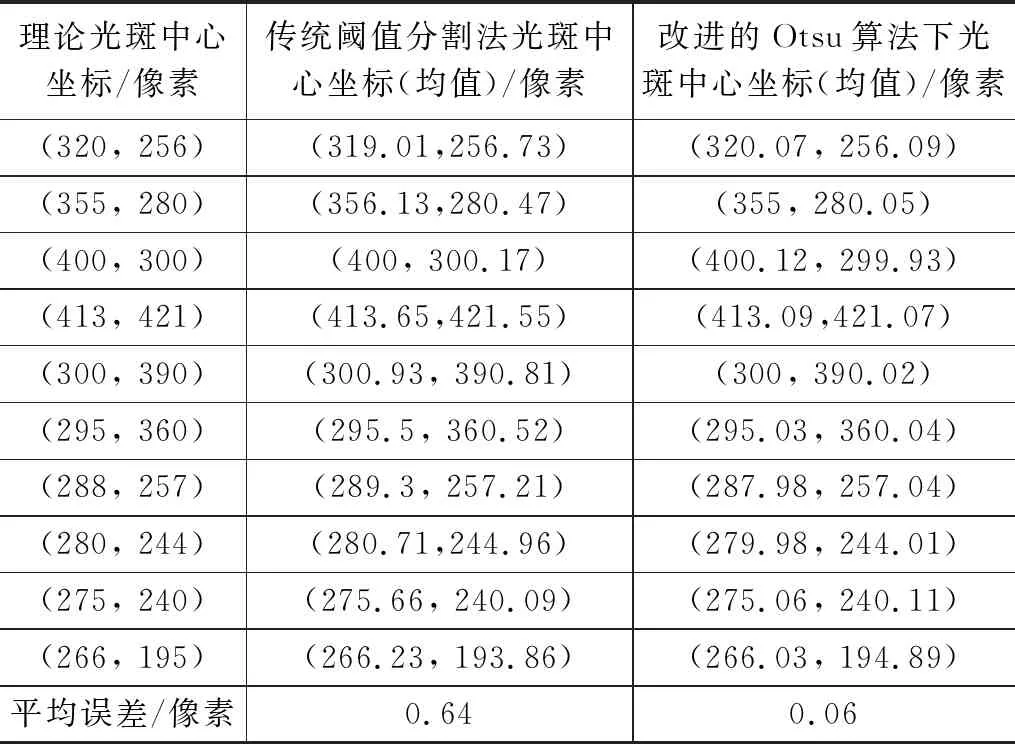
表2 不同角度下衍射光斑的中心坐标
由表2可知,传统阈值分割法光斑中心坐标像素误差在0.64个像素左右,而改进的Otsu算法误差在0.06个像素左右,实验结果表明,相较于传统的阈值分割算法,改进后的Otsu算法使光斑中心提取精度达到了0.06个像素,有效抑制了盲元和光晕对光斑中心提取的影响,提高了激光告警系统对光斑提取精度。
基于改进后的Otsu算法,将灰度质心法提取出来的光斑中心坐标x粗、y粗、x精、y精代入式(1)~(4)中得到来袭激光的方位角、俯仰角和波长。以转台的角度为基准,激光告警系统测量的方位角与俯仰角和转台角度对比结果如表3所示。

表3 激光告警系统测量角度对比
由表3可知,双目高精度宽波段激光告警系统的方位角和俯仰角测量最大误差为0.1°,平均误差为0.03°,角度分辨率达到了0.05°,相比较传统激光告警系统,从测量精度和角度分辨率两个方面都有了较大的提升。
为了验证双目高精度宽波段激光告警系统的视场范围,在转台俯仰角为0°时,使方位角以0.05°的步进依次增加,记录出可测范围内x精和转台角度的关系,如图12(a)所示。转台方位角为0°时,可测范围内y精和转台角度的关系,如图12(b)所示。
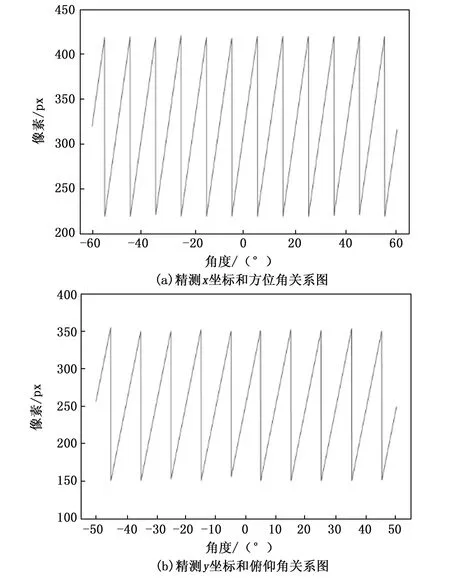
图12 光斑中心坐标与角度关系图
由图12可知,随着转台角度的不断变化,距离成像中心最近的光斑中心坐标x精和y精呈现周期性变化,符合光栅衍射的成像原理,并且双目高精度宽波段激光告警系统测量的方位角视场范围可以达到±60°,俯仰角视场范围可以达到±50°。
5 结束语
本文针对激光告警系统采集的光斑中心提取误差大,角度测量精度差和测量分辨率低的问题,设计了一种基于FPGA和改进的Otsu算法的高精度宽波段激光告警系统。系统通过将改进的Otsu阈值分割算法和探测器图像输出相结合起来,通过自适应计算出合理的阈值,有效抑制了探测器固有噪声和衍射光晕的干扰,提高了探测器的成像质量,突出了探测目标的信息。经验证,改进后的激光告警系统对光斑中心提取平均误差在0.06个像素,系统的方位角视场范围达到±60°,俯仰角视场范围达到±50°,在满足大视场范围的同时,角度分辨率达到0.05°,角度测量平均误差为0.03°。实验证明,双目高精度宽波段系统在测量精度和视场范围等方面都有了一定的改善,满足了激光告警系统在现代化战争的应用需求。
猜你喜欢
都市(2023年6期)2023-12-28 07:56:54
诗歌月刊(2023年1期)2023-03-22 14:06:24
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
阅读(高年级)(2019年9期)2019-11-15 07:22:54
阅读与作文(小学高年级版)(2019年8期)2019-10-16 04:46:50
小学科学(2019年12期)2019-01-06 03:38:45
河南科技(2015年18期)2015-11-25 08:50:14
