融合主动减振的增程混动系统动力域控制器开发
2024-05-15 18:00:04方成,郭圣刚,胡耀东,刘思源,徐可鹏,杨福源
车用发动机 2024年2期
方成,郭圣刚,胡耀东,刘思源,徐可鹏,杨福源

摘要: 针对增程混动系统的扭转振动问题,开发了一种基于多核单片机的动力域控制器,集成了整车控制、APU系统控制、发动机控制和电机控制的软硬件,在多核任务分配和核间协调的基础上,通过电机相位和发动机相位同步算法,利用矩形波进行扭矩补偿,实现了主动减振功能。试验结果表明:利用该控制器,恒转速倒拖工况发动机转速波动范围可以减少79.7%;倒拖起动工况和自由停机工况共振时,第一阶次频率分量的幅值降幅约42.9%。
关键词: 混合动力汽车;控制器;主动减振
DOI: 10.3969/j.issn.1001-2222.2024.02.007
中图分类号:U469.7文献标志码: B文章编号: 1001-2222(2024)02-0047-06
在节能和减排的双重压力下,混合动力成为汽车动力系统的技术路线之一,它既能降低整车油耗,又能解决里程焦虑问题[1]。依据发动机和电机的耦合方式,混合动力系统分为串联、并联和混联等,但无论是哪种构型,NVH(noise vibration harshness)都是混合动力汽车开发中需要解决的问题[2]。混合动力汽车的舒适性和驾驶性受到多方面因素的影响,来自传动系统的扭转振动是关键之一:一方面,扭转振动可能会损坏动力总成的部件和连接轴;另一方面,当发动机曲轴的扭转振动传递到车架时,会引起车身振动,降低驾驶的舒适性[3-4]。发动机的扭转振动主要来源于起动过程、怠速过程和停机过程[5]。增程混动系统是市面上常见的一种混合动力构型,通常由发动机和ISG(integrated starter generator)电机组成辅助动力单元(auxiliary power unit,APU)[6]。通过主动减振技术,利用ISG电机输出与发动机输出扭矩反向的补偿扭矩,可以显著降低发动机的转速波动和振动水平[7]。
在之前的研究中,分别使用发动机控制器(engine control unit,ECU)和电机控制器(motor control unit,MCU)控制发动机和ISG电机,两个控制器之间通过CAN(controller area network)总线进行通信。CAN总线的通信波特率和通信延迟限制了系统的动态协调能力。
本研究开发了一个动力域控制器(domain control unit,DCU),集成了整车控制、APU系统控制、发动机控制和电机控制等功能,基于多核单片机核间同步进行电机和发动机的高频协调控制,实现了主动减振(active damping control,ADC)功能。
1试验环境
研究用发动机为一台YC4EG185高压共轨柴油机,发动机部分参数见表1。
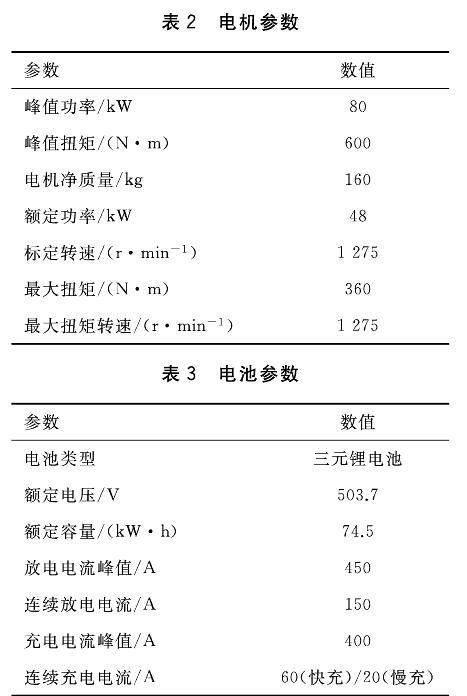
ISG电机为TZ435XS-SL080F永磁同步电机,发动机与电机为同轴刚性连接,电机部分参数见表2。电池包部分参数如表3所示。
测试台架配备HT250交流电力测功机,用于记录发动机转速和动力系统扭矩;配备Saleae Logic16逻辑分析仪,用于采集光电编码器信号获得发动机瞬时转速;配备Cambustion Dewetron燃烧分析仪,用于采集缸压信号。
2域控制器硬件设计
域控制器由主控板、驱动板、功率模块、结构件和附件(包括配电板、电流传感器和保险等)组成。域控制器主电路框架见图1。
主控板负责运行控制逻辑,在该板上集成了整车控制、发动机控制、燃烧控制和电机控制的弱电电路,包括以下部分。
1) 电源电路。通过DCDC和LDO芯片,产生内部电路和传感器供电需要的5 V,3.3 V和1.2 V等电源,以及IGBT驱动需要的15 V电源。
2) 通信电路。为了支持与其他控制单元的信息交互,以及在线监控和标定,设计了CAN和以太网的通信电路。
3) 信号调理电路。对输入的各种传感器(转速传感器、压力传感器和温度传感器等)信号和开关信号进行处理;集成了发动机各缸缸压信号的处理电路,实现放大、滤波和偏移等功能;同时还采集电机驱动的母线电压和各相电流,这些信号来自于高压部分,需要进行电气隔离。
4) 多核单片机。采用TC387高性能多核单片机,该单片机内部集成了6个运行频率达300 MHz的核心(4个功能核+2个锁步核),实时算力4 000 DMIPS(dhrystone million instructions per second,每秒处理的百万级的机器语言指令数),可满足功能安全等级ASIL-D的设计要求,另外还具备丰富的外设资源,如10 MB Flash,1 Gbit以太網和符合EVITA Full[8]的HSM(hardware security module)安全模块等。
5) 发动机及整车驱动电路。通过高低边驱动芯片驱动各种电磁阀、继电器和指示灯等,如发动机各缸喷油器电磁阀、EGR(exhaust gas recirculation)阀和轨压控制阀等。
6) 电机驱动电路。主要是输出电机驱动所需的3相6路PWM信号,一方面把单片机输出的5 V信号转换成15 V的信号,另一方面使用比较器、触发器和与门等器件实现异常驱动电流时的电机保护功能。
在驱动板上实现驱动部分的高低压隔离,把电机驱动的3相PWM信号转换成6路IGBT的驱动信号。在电路设计的基础上,进行域控制器的结构设计(见图2),在域控制器结构设计过程中,需要综合考虑防护、散热、抗振、安全和电磁兼容等性能。
3域控制器软件设计
域控制器软件分为基础软件和应用软件,软件框架如图3所示。
1) 基础软件。包括通用基础软件、转速信号处理与喷射控制软件、缸压采集和燃烧状态指标计算软件、电机矢量控制软件等。
(1) 通用基础软件。按照AUTOSAR(automotive open system architecture)[9]规范设计,包括单片机抽象层、ECU抽象层和服务层,分别包含了单片机各个模块(输入输出模块、通信模块和内存模块等)驱动、在板设备/内存硬件/通信硬件/输出输出硬件的封装、系统服务/内存服务/通信服务的封装。
(2) 转速信号处理与喷射控制软件。对曲轴转速信号和凸轮轴转速信号进行处理,建立发动机相位基准,在此基础上,根据发动机动力需求,输出各缸喷油器电磁阀的驱动脉宽。
(3) 缸压采集与燃烧状态指标计算软件。一方面,根据曲轴转速信号识别的发动机基础相位,每0.2°(曲轴转角)触发缸压采集任务,采集与发动机相位对应的各缸缸压信号;另一方面,每1°触发缸压处理任务,每6°触发运动学模型计算任务,每180°触发燃烧模型计算任务,计算各種燃烧状态指标,如瞬时放热率、累计放热、CA50和平均有效压力等[10]。
(4) 电机FOC(field orientation control)矢量控制软件。根据采集的母线电压和各相电流,利用坐标变换、PI控制器和空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)等技术,输出三相PWM信号,控制IGBT实现三相电流的调节,达到电机的目标扭矩或目标转速。
为了实现主动减振控制,需要把电机相位同步到发动机相位。通过旋转变压器来反馈电机相位,图4示出旋转变压器的转子和定子。
旋转变压器转子边缘加工成一种形状重复出现,重复次数与旋转变压器的极对数p一致。旋转变压器输出的信号,经过芯片处理后转换为k位无符号整数i(0~2k-1)给单片机。由于ISG电机与发动机同轴,电机数字相位信息i与发动机相位之间的关系如下:
φ=(m+i2k-1)×360°p。(1)
本研究中,电机极对数p为12,处理芯片输出的数字相位信息i为16位无符号整数(k=16);数字相位信息在发动机一个循环(720°)内重复出现的次数为24次,式(1)中,m(1≤m≤24)表示同一个数字相位信息第几次出现。
2) 应用软件。涵盖了从燃烧过程、发动机、电机、APU系统到整车等各个层次的控制算法。
(1) 整车控制算法。司机扭矩需求通过加速踏板输入后,转换成加速踏板目标扭矩,综合来自巡航控制、驱动控制和车辆稳定性控制的扭矩需求,经过系统扭矩保护限制后传递给动力系统控制。动力系统包括电池包、主驱电机、变速箱和APU系统等,本研究使用基于规则的功率跟随式能量管理策略[11],综合整车扭矩需求确定主驱电机的目标扭矩,根据电池包荷电状态(SOC,state of charge),确定电池包输出功率和APU系统输出功率;主驱电机的目标扭矩通过CAN总线发送给主驱电机控制器。
(2) APU系统控制算法。APU系统包含发动机和ISG电机,根据APU系统的发电功率需求,协调发动机和电机的运行,确定发动机和ISG电机的目标转速和目标扭矩。
(3) 发动机控制算法。通过燃油系统和空气系统的协调控制实现发动机动力性和经济性的控制,达到目标转速和目标扭矩,燃油系统控制输出各缸的轨压、喷油脉宽和喷油提前角,空气系统控制输出EGR率和增压压力等;通过后处理系统的控制,控制发动机的排放使之符合法规。
(4) 燃烧控制算法。一方面,通过平均指示压力(indicated mean effective pressure,IMEP)和50%放热曲轴位置(50% of the mass fraction burned,MFB50)等的闭环控制,输出各缸的喷油脉宽和喷油提前角的调节量,对燃油系统控制输出的喷油脉宽和喷油提前角进行修正,降低发动机循环波动和各缸的不一致性;另一方面,通过缸内压力和瞬时转速的采集,可以计算发动机的气体作用力扭矩和往复惯性力扭矩,实时估计发动机输出的实际扭矩。
(5) 电机控制算法。根据APU系统发电/驱动需求和主动减振需求,确定ISG电机的目标扭矩。主动减振的基本原理是让电机可以输出一个与发动机输出瞬时扭矩幅值相当,但是相位相反的理想补偿扭矩。但由于电机控制周期和电机响应时间的影响,无法输出该理想补偿扭矩,可以设计补偿扭矩波形[13-14](见图5)。
补偿扭矩方波的最大值为Teng,max-Teng,avr,最小值为Teng,max-Teng,min,单个方波波形的持续时间如下计算:
(Teng,max-Teng,avr)·Δφ+=
∫φ2φ1(Teng(φ)-Teng,avr)dφ,(2)
(Teng,min-Teng,avr)·Δφ-=
∫φ3φ2(Teng(φ)-Teng,avr)dφ。(3)
一方面,补偿扭矩方波关于角度的积分值为0,这样保证不改变APU系统输出的功率;另一方面,正的补偿扭矩(表示电机发电)积分与高于发动机平均扭矩的扭矩积分相同,负的补偿扭矩(表示电机驱动)积分与低于发动机平均扭矩的扭矩积分相同。
主动减振补偿扭矩的输出必须与发动机相位同步,利用旋转变压器获得电机相位,通过同步算法获得对应的发动机相位,使用该相位查表获得同步补偿扭矩,作为主动减振目标扭矩。该目标扭矩再叠加APU系统电机需求扭矩,作为最终的ISG电机目标扭矩,由基础软件中的矢量控制软件控制电机三相电流实现该目标扭矩。
4任务分配与核间协调机制
本研究所用的TC387高性能单片机,内部具备4个运算核心,一方面是为了均衡各个内核的计算负荷,另一方面可以让软件架构更清晰。本研究对各个内核进行了任务分配:
1) Core0。运行通用基础软件、发动机控制软件、APU系统控制软件、动力系统控制软件和整车控制软件,虽然任务较多,但最快的任务调度周期为10 ms。
2) Core1。运行转速信号处理软件、喷射控制软件和燃烧控制算法,转速信号处理任务6°触发一次;燃烧控制算法包括循环间燃烧控制和循环内燃烧控制,其中循环内燃烧控制对实时性要求很高,任务需要每隔1°同步调用[15],在发动机转速为2 000 r/min时,任务调度周期为83.3 μs。
3) Core2。运行缸压采集和燃烧状态指标计算软件,包含0.2°,1°和6°的软件任务,在发动机转速为2 000 r/min的情况下,任务调度周期分别为16.7 μs,83.3 μs和500 μs。该内核计算负荷高,未安排其他任务。
4) Core3。运行电机FOC矢量控制软件,主任务200 μs运行一次,输出各个IGBT功率管控制PWM的频率和占空比。
在任务分配的基础上,对内存进行分配。
1) 原则上,各内核拥有独立的堆栈空間、代码空间、常数空间和变量空间。
2) 共享变量,保存在单独的共享内存空间,使用标志位指示共享数据的更新状态,同时,通过旗语(Semaphore)来保证共享区域的数据连续性,避免多个内核对同一片内存进行写操作。
3) 共享的代码和参数,程序在运行过程中只会进行读取,而不会发生更改行为,所以可以保存在任何一个内核的代码空间。
最后,在各个内核之间还需要进行任务同步。
1) 强实时任务同步,指的是通过一个内核去触发另一个内核的任务运行,任务调度允许延迟时间小于10 μs;对于这类任务同步,则直接由一个内核去触发另一个内核的高优先级中断,在高优先级中断中直接运行相应代码,如在Core1的转速信号处理任务中,会基于转速预测来触发Core2的0.2°缸压采集任务[16],就是通过在Core1中触发Core2的高优先级中断来实现。
2) 弱实时任务同步,指的是通过一个内核去触发另一个内核的任务运行,任务调度允许延迟时间较长(一般大于100 μs);对于这类任务同步,则由一个内核通过操作系统去触发另一个内核的软件任务。
5控制平台试验验证
完成域控制器软硬件开发后,在发动机台架上进行试验,验证控制器的功能和性能。图6示出700 r/min恒转速倒拖工况下的主动减振试验结果。由图6可知,发动机的转速波动范围从42.4 r/min减小至8.6 r/min,降低了79.7%。循环角加速度平方定义为在一个完整发动机工作循环内角加速度平方的积分,可用于表征振动中包含的能量,主动减振介入后,该指标可减小89.7%。
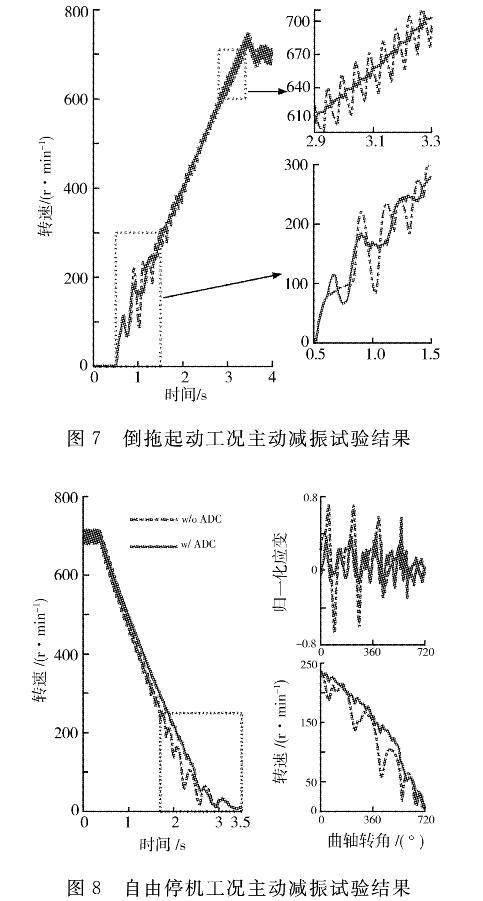
增程混动系统典型瞬态工况(倒拖起动和自由停机)的试验结果见图7和图8。
由图7可以看到,主动减振开启后,倒拖加速过程中的转速波动范围被大幅度削减,由共振导致的转速波动同样被削减。使用短时傅里叶变换(short-time fourier transform,STFT)进行时频分析,当共振发生时,第一阶次频率分量的幅值骤增至约70 r/min。主动减振使能后,该幅值下降至不到40 r/min,降幅为42.9%。
由于主动减振应用前后轴系具有不同的减速度,为了方便对比,将自由停机过程的试验结果绘制在曲轴转角域。结果显示,自由停机过程中的归一化应变的幅值能够被主动减振有效地削减;同时,由于周期性压缩缸内工质引起的转速波动也被有效削减。使用短时傅里叶变换进行分析,在自由停机过程中,当共振发生时,第一阶次频率分量的幅值骤增至约35 r/min。主动减振使能后,该幅值下降至不到20 r/min,降幅约42.9%。
6结论
a) 基于高性能多核芯片TC387开发的增程混动系统动力域控制器,集成了燃烧控制、发动机控制、ISG电机控制、APU系统控制和整车控制功能的硬件和软件,在多核任务分配和核间协调基础上,通过电机相位和曲轴相位同步算法,利用矩形波进行扭矩补偿,实现了主动减振功能;
b) 利用该域控制器,在700 r/min恒转速倒拖工况,发动机的转速波动范围能够从42.4 r/min减小至8.6 r/min,削减率为79.7%;
c) 利用该域控制器,倒拖起动过程共振时,第一阶次频率分量的幅值从约70 r/min下降至不到40 r/min,降幅约42.9%;自由停机共振时,第一阶次频率分量的幅值从约35 r/min下降至不到20 r/min,降幅约42.9%。
参考文献:
[1]杨如枝,满兴家,叶年业,等.米勒循环和低压EGR对混动专用发动机性能影响的研究[J].车用发动机,2022(3):7-14.
[2]Govindswamy Kiran,Thomas Wellmann,Georg Eisele.Aspects of NVH integration in hybrid vehicles[C].SAE Paper 2009-01-2085.
[3]Rong Guo,Chong Cao,Yongchao Huang.Experimental investigation of the noise,vibration and harshness performances of a range-extended electric vehicle[J].Proceedings of the Institution of Mechanical Engineers,Part D: Journal of Automobile Engineering,2015,230(5):650-663.
[4]Lijun Zhang,Wenlong Chen,Dejian Meng,et al.Vibration analysis of series-parallel hybrid powertrain system under typical working condition and modes[C].SAE Paper 2018-01-1291.
[5]Yechen Qin,Xiaolin Tang,Tong Jia,et al.Nosie and vibration suppression in hybrid electric vehicles:state of the art and challenges[J].Renewable and Sustainable Energy Reviews,2020,124:1-16.
[6]欧阳明高,李建秋,杨福源,等.汽车新型动力系统:构型、建模与控制[M].北京:清华大学出版社,2008:260-268.
[7]胡耀东.混合动力系统高频主动转矩补偿控制研究[D].北京:清华大学,2021.
[8]EVATA project.Project summary[M/OL].[2012-04-01].http://www.evita-project.org.
[9]AUTOSAR Organization.Layered software architec-ture[M/OL].[2014-03-31].http://www.autosar.org.
[10]方成,杨福源,欧阳明高,等.新一代压燃发动机控制平台开发[J].汽车安全与节能学报,2017,8(4):403-411.
[11]王开德,韩凯凯.基于增程式电动汽车的能量管理控制策略研究[J].车用发动机,2019(3):38-45.
[12]方成,杨福源,欧阳明高,等.使用缸压信息的柴油机低温燃烧闭环控制[J].清华大学学报(自然科学版),2013,53(3):371-377.
[13] Jinyu Zhang,Song Hu,Longyu Ju,et al.Active vibration control strategy for online application in a range extender[J].IEEE Access,2023,11:26686-26702.
[14]Yuki Nakajima,Masaaki Uchida,Hiroaki Ogane,et al.A study on the reduction of crankshaft rotational vibration velocity by using a motor-generator[J].JSAE Review,2000,21:335-341.
[15]Cheng Fang,Minggao Ouyang,Per Tunestal,et al.Closed-loop combustion phase control for multiple combustion modes by multiple injections in a compression ignition engine fueled by gasoline-diesel mixture[J].Applied Energy,2018,231:816-825.
[16]方成,高国景,杨福源,等.柴油机控制用燃烧状态分析单元开发研究[J].内燃机工程,2014,35(1):51-56.
Development of Powertrain Domain Control Unit with Active Damping Control for Range-Extended Hybrid System
FANG Cheng1,2,GUO Shenggang1,3,HU Yaodong1,LIU Siyuan3,XU Kepeng3,YANG Fuyuan1
(1.State Key Laboratory of Automotive Safety and Energy,Tsinghua University,Beijing100084,China;2.ECTEK Automotive Electronics Co.,Ltd.,Changzhou213164,China;3.Weichai Power Co.,Ltd.,Weifang261001,China)
Abstract: Aiming to reduce the torsional vibration of range-extended hybrid system, a powertrain domain control unit based on a multi-core microcontroller was developed. The softwares and hardwares of vehicle control, APU system control, engine control and motor control were integrated. Based on multi-core tasking and inter-core coordination, the synchronization algorithm between the motor phase and engine phase was used, the rectangular torque wave was used for torque compensation, and the active damping control was realized. The experimental results show that the engine speed fluctuation range can reduce by 79.7% under constant speed motoring conditions by using this controller. When the resonance of motoring starting conditions and free stop conditions happens, the amplitude of first-order frequency decreases by approximately 42.9%.
Key words: hybrid vehicle;control unit;active damping control
[編辑: 袁晓燕]
猜你喜欢
煤气与热力(2021年12期)2022-01-19 05:19:42
大陆桥视野·下(2016年11期)2017-02-28 22:43:28
汽车工程学报(2016年5期)2017-01-16 02:25:57
汽车工程学报(2016年6期)2017-01-11 17:35:29
通信电源技术(2016年4期)2016-04-04 02:57:34
科技与创新(2015年23期)2015-12-08 22:29:11
现代电子技术(2015年22期)2015-12-02 21:44:41
科技资讯(2015年12期)2015-06-29 18:58:02
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17