基于磁耦合传动的吸痰装置的研制与验证
2024-05-13 07:05谭文君王赛宇邢斌瑜汤博袁力蓉吕毅1c朱皓阳1d
中国医疗设备 2024年3期
谭文君,王赛宇,邢斌瑜,汤博,袁力蓉,吕毅,1c,朱皓阳,1d
1. 西安交通大学第一附属医院 a. 外科重症医学科;b. 精准外科与再生医学国家地方联合工程研究中心;c. 肝胆外科;d. 麻醉手术部,陕西 西安 710061;2. 西安交通大学 医学部护理系,陕西 西安 710048
引言
气道分泌物管理对保持有效的气体交换至关重要,吸痰是清除气道分泌物的必要措施[1]。对于建立人工气道的患者,人工气道在一定程度上破坏了机体正常的解剖结构,使上呼吸道失去了对吸入空气加湿加热,以及对灰尘和微生物过滤的功能,同时会干扰正常的保护性上气道反射,减少有效咳嗽,使气道内痰液增多、质地更黏稠、不易被排出。淤积的痰液使气道变窄、堵塞而致肺不张,增加病原菌繁殖从而致肺部感染[2-4]。而绝大多数危重症患者身体衰弱,不能完成自主咳嗽和排痰,加之并发肺部炎症,容易造成其呼吸道梗阻、呼吸衰竭等严重情况。因此,通过人工气道内吸痰操作可及时清除呼吸道内的分泌物,增加患者肺通气、换气功能,有效改善患者的生存质量,降低并发症,改善预后,是挽救危重症患者的重要措施之一[5-6]。
目前的吸痰操作均由护士手动进行。在临床工作中,危重症患者的吸痰频率高,且在每次吸痰操作过程中需更换吸痰管,注意吸引压力,监测患者的生命体征、血氧饱和度、瞳孔等变化[7],无疑增加了护士的工作量和工作强度,妨碍其他重要护理操作同步进行,还存在气道损伤的风险,不利于危重症患者的综合管理。在这种情况下,本文致力于开发机械化、自动化、智能化的吸痰装置以辅助或代替护士完成重复、琐碎的吸痰操作。前期本文研究团队在2016 年申请了智能吸痰装置的专利(专利号:CN106039428A 和CN105816925A)[8-9]。该专利研制的样机分别采用机械手及直线导轨的驱动、传动方式完成人工气道内送、退吸痰管。虽然该专利可在一定程度上完成吸痰操作且未见明显安全隐患,但抓持吸痰管的装置忽略了吸痰管光滑的材质,使送管成功率难以保证,且退管旋转动作难以有效完成,这将影响后续操作和临床应用[10]。因此,针对人工气道吸痰操作中送、退吸痰管这一核心操作,需要探寻一种能确保吸痰管输送的结构,从而完善吸痰装置的研制。
本团队近年来致力于研究磁相关技术在医疗设备中的应用,用以解决目前临床中所存在的问题,具有一定磁相关技术和医疗机器人的研发基础。其中,磁耦合传动技术具有驱动与传动之间非硬链接而是通过磁铁之间的相互作用,以非接触的方法达到传动功能的特点。为解决前期研究中送、退吸痰管的技术问题,本文将磁耦合传动技术应用其中以确保吸痰管输送的有效性和稳定性,完成吸痰装置的改善和实施,并通过吸痰练习模型对该吸痰装置实施可行性验证,达到有效代替护理人员完成吸痰操作,减少护理工作量,提高护理工作质量和医疗水平的目的。
1 设计思路和原理
针对目前人工气道吸痰操作中送、退吸痰管这一核心操作所存在的技术问题,在前期已获取实际环境下的吸痰技术操作的必要参数、已有相关控制单元和人机界面的基础上[10],本文将磁耦合传动技术结合滚轴输送装置应用于吸痰操作中从而完成整体吸痰装置。该磁耦合传动装置主要由3 部分构成,分别是内磁环、隔离套筒和外磁环。内磁环和外磁环均匀安装了磁瓦,由电动机带动外磁环转动。内磁环的磁铁在外磁环磁铁的磁场作用下与外磁环同步转动,实现非接触动力传递。将非接触式传动技术应用于吸痰装置的优势在于:① 确保吸痰管送入的稳定性和安全性,当送管阻力小于磁耦合传动力时,装置能稳定地送管;当送管阻力大于磁耦合传动时,装置则不能送管,该传动方式避免了因送管力量过大而损伤气道。② 便于拆卸、消毒、清洗,适用于重复使用的医疗器械。
本设计的操作原理为吸痰装置可连接气管插管和闭式吸痰管接口,形成稳定的吸痰-人工气道管路。通过磁耦合传动系统的磁性非接触动力带动防滑滚轴,并通过滚轴转动实现吸痰管的稳定输送。当吸痰管送入气道指定位置后,机器自带的负压吸引器自动启动以提供吸力,同时通过滚轴回退吸痰管完成吸痰操作。该装置解决了上一代样机中机械手抓持吸痰管易滑动、输送不到位的问题,达到稳定输送吸痰管、正确完成吸痰操作的目的。
2 基本结构
根据设计思路研发一种基于磁耦合传动的吸痰装置,该装置包括:① 吸痰单元:用以传送吸痰管、实施吸痰操作,是本次研发修改的主要部分;② 控制单元:用以设置输送吸痰管的速度、深度、间隔时间等参数;③ 负压吸引器:用以根据控制单元设定的压力参数提供相应的压力并进行吸痰操作,其中根据指南等[1,11-12]推荐将压力参数设定为80~200 mmHg;④ 负压吸引瓶:用以储存吸出的痰液。其整体实物图如图1 所示。
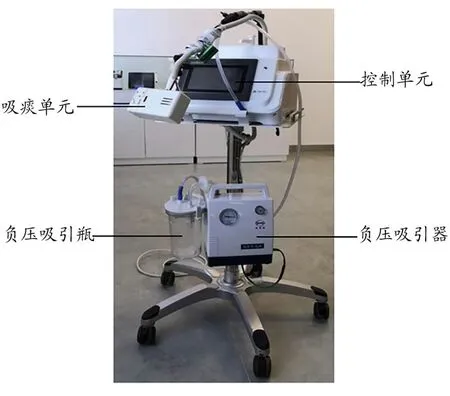
图1 基于磁耦合传动吸痰装置实物图
2.1 吸痰单元设计
基于磁耦合传动的吸痰单元的示意图如图2 所示,设计图如图3 所示。吸痰单元主要分为驱动模块、传动模块和磁耦合组件3 部分。① 驱动模块:包含用于提供动能的电机,电机控制为脉冲+方向。② 传动模块:包含传动组件(图4),由上下相互啮合的2 个滚轮组成;滚轮包括齿轮和卡管滚轴,上下滚轮的齿轮相互啮合,上下卡管滚轴共同形成吸痰管通道。③ 磁耦合组件:为可拆卸组件,包含内转子和外转子;内转子与电机相连,外转子与滚轮相连(图3b、3d);电机发电时带动外磁环转动;内磁环在磁场作用下与外磁环同步转动,从而带动齿轮和卡管滚轴,卡管滚轴处便可开始输送吸痰管;电机不发电时可将磁耦合组件拆卸、清洗和消毒。

图2 磁耦合传动吸痰单元示意图

图3 吸痰单元设计图

图4 吸痰单元实物内部图
2.2 控制单元设计
控制单元采用可编程逻辑控制器(Programmable Logic Controller,PLC)+ 人机界面(Human Machine Interface,HMI)的方式。人机界面为触屏式面板(图5),PLC 和HMI 之间为串口通信。控制单元与电机相连,电机控制为脉冲+方向。在人机界面可通过设置速度、位移等参数直接控制电机的正转、反转和电机加减速,通过磁耦合传动组件带动吸痰管前进和后退。其中,设置吸痰操作所需的技术参数为前期在临床中收集和在吸痰模型中验证所得的数据。为保护患者安全,根据前期收集和模拟练习所得的参数,设定电机所提供的驱动推力最大为1 N,设定送、退吸痰管的速度为5~6 cm/s。在人机界面可根据不同患者的不同情况输入操作所需的各种参数,从而实现个体化吸痰。

图5 控制单元人机界面
3 基于磁耦合传动吸痰装置的使用方法
使用磁耦合驱动吸痰装置进行人工气道内的操作主要包括3 个步骤。
(1)吸痰通道的固定:危重症患者因机械通气的缘故,均要进行气管插管,建立人工气道。使用磁耦合传动吸痰装置代替人工吸痰操作,首先要完成机器与人工气道的对接,见图6。打开吸痰装置壳体,分别将气管插管及吸痰管与吸痰装置相连,手动搓动闭式吸痰管外套,将吸痰管头端卡入两滚轮之间,关闭外壳,实现吸痰通道的接通。因闭式吸痰管留有氧气通道,在吸痰过程中不影响机械通气。

图6 吸痰装置使用示意图
(2)设置参数,完成吸痰:在控制端的人机界面选择合适的吸痰参数(如送管速度、深度、间隔时间等),启动吸痰程序。装置开启后,电机带动内转子旋转,因磁场作用,外转子在磁力的作用下进行转动,随之带动上滚轮运动,实现吸痰管的输送。输送的吸痰管可顺着气管导管送入气道。当吸痰管送入指定位置后,自动启动负压,并回退完成痰液吸出。根据时间间隔,重复上述操作。因闭式吸痰管是将吸痰导管持续密闭在塑料袋中,在吸痰全过程中不暴露,所以闭式吸痰管可重复使用。每位患者预计每12~24 小时更换一次吸痰管及吸痰设备,若中途出现污染需立即更换[13-15]。
(3)拆卸、清洗和消毒:每次吸引结束后,使用无菌注射用水或无菌生理盐水对管路进行冲洗。该装置为可重复使用设备,装置使用后,与吸痰管接触部位(主要为两个滚轮)需要清洗、消毒。磁耦合传动装置为非硬性连接,便于拆卸。使用75%的酒精擦拭设备3 次,尤其是滚轮部位,再于钴60 射线下灭菌,以备下次使用。
4 吸痰装置的有效性和安全性评价
为了确定该吸痰装置的有效性和安全性,本文将基于磁耦合传动的吸痰装置应用于建立人工气道的高级吸痰练习模型中进行模拟实验(图6)。
4.1 有效性评价
为确定该吸痰装置的有效性,以鸡蛋清模拟痰液,将蛋清中加入红色墨水以便于观察。共进行20 次模拟实验,每次用15 mL 注射器抽取10 mL 的鸡蛋清,并注入仿真模拟人的气道中,使用12 Fr 闭式吸痰管将气管插管及闭式吸痰管与吸痰装置和负压吸引器相连。在人机界面设置参数,其中送管速度为6 cm/s、插管深度为12 cm、负压为180 mmHg。设置好参数后进行自动吸痰操作,操作完成后清理模型气道中残留的蛋清以便于下次操作。20 次模拟实验中,17 次实验可成功吸出模拟痰液约5~9 mL,平均可抽出约7.5 mL,仅3 次因阻力过大未成功输送吸痰管致未抽出痰液。分析未抽出痰液的原因是由于模拟痰液容易风干致黏稠,使模拟痰液附着于模拟人气道壁内致阻力增加。出于安全考虑,使吸痰装置停止输送吸痰管,清洗模拟人气道并重新设置参数后一般可重新成功输送。
4.2 安全性评价
为确定吸痰装置的安全性,将万能测力计的测量探头与吸痰管相连以测量送、退管过程中的力量大小。将万能测力计放置于吸痰模型中分别进行手动吸痰和机器吸痰,通过对比手动和机器传动送、退吸痰管时进管推力、退管拉力和旋转力的大小来确定其安全性。其中,手动吸痰操作由1 名在重症加强护理病房工作2 年以上的护士在吸痰练习模型上进行。本文一共进行了10 次对比实验,具体实验结果数据如表1 所示。由于进管推力、退管拉力和旋转力等参数是在前期手工操作吸痰时获得,并被应用于装置参数的设定,所以在10 次对比实验中,吸痰装置与手工操作的数据未见明显统计学差异,但吸痰装置更为稳定。手工推力、拉力和旋转力等参数是在使用万能测力计进行临床实操及动物离体肺脏试验时所得,且在设计研制初期已经选择了尺寸合适的磁铁以提供合适的传输力,使吸痰管的前进及后退的力度控制在手工最大力以下。以该力度输送吸痰管,不会损伤气道黏膜[16],确保了设备的安全性。

表1 安全性模拟实验结果(N)
值得注意的是,原本预想吸痰过程中由于闭式吸痰管留有氧气通道不会影响机械通气,但在两种模拟实验中发现,因机器中空且接缝处存在间隙,在负压吸引器提供负压进行吸痰和呼吸机在输送氧气时,机器中间解封处会存在漏气现象,从而可能影响氧气供应效果。
在人工气道的吸痰练习模型中进行的有效性和安全性实验结果表明,基于磁耦合传动吸痰装置可实现有效吸痰,且其推力、拉力和旋转力均在安全范围内。当超过安全范围时,该装置会自动停止,使其安全性有所保障,不会损伤气道,而目前存在的漏气问题可为下一步吸痰装置的设计和优化提供思路。
5 讨论
建立人工气道的患者常常会残留分泌物,而人工气道内吸痰是清除分泌物的重要措施,是重症监护中最常执行的干预措施之一,也是防止肺不张、低氧血症、肺部感染等并发症的主要措施之一。在传统吸痰操作中,医护人员难以为大部分患者进行及时又有效的吸痰,在重复繁杂的护理工作中还容易忽视吸痰操作。即使进行了吸痰操作,不同级别、不同年资、不同手法的护士所进行的吸痰操作效果也各有不同,若操作不当甚至有可能导致气道损伤[17]。临床中也会使用人工拍背或多频震动排痰机辅助患者排痰,但手工拍背排痰存在力道作用较浅、不均匀、可持续性差及传导性差的缺点[18]。排痰机也需人工操作,体力消耗大且效果不明确,如使用方法不恰当还会引发患者心脏不适。由于吸痰操作的简单性和重复性较强,易于被机械模仿,因此国内外正致力于开发一款有效的吸痰装置以减轻工作负担、提高工作效率。日本ULVAC 机工株式会社在2016 年研制了一款具有引管路、切换部、测定部以及控制部的人工呼吸系统吸痰装置,其吸痰方式类似于机械辅助的吸气/呼气机,但该装置体型较大且操作复杂[19]。2021 年,刘齐山[20]设计了一种便于人工气道内自动吸痰的装置,当患者咳嗽并将痰液咳出时,咳嗽的气流推开吸痰器的活塞从而将痰液吸走,但该装置不能完整代替吸痰操作。其余吸痰装置的研发也多集中于对现有设备的改善方面,如便携式痰液收集装置[21]、吸力可调节吸痰器[22]等。本研究团队在前期采用仿生设计的方式成功研制了智能吸痰机器人,但该机器人的送管成功率无法得到保证[8-9]。
针对现有排痰方法和预期研发智能吸痰装置所存在的不足,本研究利用磁性非接触力取代传统硬性传动结构,从而改善吸痰装置在送、退吸痰管时出现的易卡顿、输送不成功等缺点。由验证性试验的结果可知,该装置送、退吸痰管较稳定和安全,且其推力在一定范围内可避免强制送管致患者气道损伤的问题。该装置的结构特点与技术参数均来源于临床实践,其过程不仅不改变人工气道内吸痰的原理,还可根据患者的不同情况设置不同送管速度、深度、时间等参数,既符合临床操作的特点,又可实现个体化、精准化吸痰。其次,该装置的主要吸痰部分小巧、使用方法简单,不易受空间大小的限制,且装置可拆卸,便于清洗和消毒,避免了操作过程中伴随的潜在感染。在可行性训练中,本文根据中华护理学会下发的行业标准《成人有创机械通气气道内吸引技术操作》[23]中要求的“根据人工气道的型号选择适宜型号的吸引(吸痰)管,吸引(吸痰)管管道外径应不超过人工气道内径的50%”选择了12 Fr 吸痰管,且由于人工气道的存在,吸痰管的运动范围被限制在吸痰装置及气管插管中,而磁耦合驱动传输吸痰管力度有限,在遇到阻力或下管不顺畅时,会停止输送而致下管失败,一般不会出现吸痰管打折、盘曲于口腔或气道内而致黏膜损伤的现象。有效性实验和安全性实验也表明了该吸痰装置可稳定、安全地送退吸痰管,有效完成吸痰操作。
本研究的吸痰装置在实际使用过程中也存在一定局限性。因装置在接缝处存在缝隙,吸痰过程中会出现漏气现象,该问题可能会影响吸痰时负压的引力而无法将痰液完全吸出,从而降低吸痰效率,也可能会影响人工气道的供氧效果。之后的研究会在后续实验中改进完善并优化该装置,如结合人工智能设置机器可根据患者情况抓取临床数据、自动触发吸痰操作,还可增加血氧饱和度监测模块,保证吸痰过程中机械通气的安全性,使其更方便、更有效、更安全地应用于需要长期进行机械通气和频繁吸痰的患者治疗中以及医院临床、养老院、康复医院等工作场景中。
6 结论
本文研制了一款基于磁耦合传动系统的智能吸痰装置,与目前临床中常用的传统排痰和手动吸痰操作相比,该装置具有智能化、个体化、安全化、便捷化等优势,可代替护士完成繁杂的吸痰操作,减少患者的痛苦,减轻护士的工作量,为护士节约更多时间去完成其他护理工作,从而提高护理质量和患者满意度。
猜你喜欢
军事文摘(2022年8期)2022-11-03
物流技术与应用(2022年8期)2022-08-26
小学科学(学生版)(2021年3期)2021-04-13
哈哈画报(2021年11期)2021-02-28
物流技术与应用(2020年4期)2020-05-06
国际呼吸杂志(2019年22期)2019-12-09
国际呼吸杂志(2019年5期)2019-03-30
国际呼吸杂志(2019年3期)2019-03-01
国际呼吸杂志(2019年2期)2019-02-14
中国自行车(2018年8期)2018-09-26