气道异物淤积导致呼吸波形改变的临床模拟研究
2024-05-13 07:05熊伟毛彬陈寒鉴黄永全王彬权孙静张倩冯靖祎
中国医疗设备 2024年3期
熊伟,毛彬,陈寒鉴,黄永全,王彬权,孙静,张倩,冯靖祎,3
1. 浙江大学医学院附属第一医院 a. 医学工程与物资部;b. 麻醉科,浙江 杭州 310003;2. 浙江大学 生物医学工程与仪器科学学院,浙江 杭州 310027;3. 浙江大学医学院附属第一医院 浙江省医疗器械临床评价技术研究重点实验室,浙江 杭州 310003
引言
在麻醉相关死亡病例中有70%是由气道问题所致,主要为气道梗阻、困难气道和插管误入食管[1],因此气道管理在麻醉患者急救和手术中至关重要,控制了气道才能保证患者获得足够的氧气供应,保障患者围手术期的安全,而快速建立气道并保证气道持续畅通也成为麻醉医师必备的一项工作技能[2-3]。现有的气道管理设备与技术多集中于解决人工气道建立的过程问题,如应用了可视化技术的可视喉镜和可视喉罩等[4-9]提供了多种安全有效的人工气道建立途径,但用于气道建立后管理过程的设备和技术则较少。目前对人工气道建立后的监测更多依赖于麻醉医师根据工作经验对麻醉患者气道通气参数的观察或呼吸机的报警[10],缺乏对气道管理过程更直接、持续、实时的数字化监测。异物阻塞型气道梗阻主要是因为血液、分泌物或呕吐物等[11]堵住了气管,若发生在可视气道中,可通过图像识别技术实时辨别并给出相应等级的声光报警。为验证气道实时可视化和数字化监测的可行性,本文拟开展针对气道异物淤积导致呼吸波形改变的研究,建立气道异物淤积量与呼吸波形改变程度之间的关系。
1 研究思路
鉴于患者发生气道阻塞的突发性及医护人员处理的及时性等实际因素,无法通过临床试验获得真实世界的患者气道阻塞数据及其对应的呼吸波形数据,故采用模拟试验获取相关数据并进行分析。选用科室备用的德国Dräger Evita V300 呼吸机1 台(带呼吸管路)、德国Dräger SelfTestLung™模拟肺1 个、美国柯惠331/5661可伸缩型呼吸回路延长管(模拟人体气道)若干、美国3D SYSTEMS Figure 4 Modular 3D 打印机打印的管路阻塞标准件5 个、龙德20 mL 注射器若干、WOWSTICK GLUER 锂电热熔胶枪1 支、凯普乐KL-250II 型超声耦合剂1 瓶、优亿TIC-I3 可视软性喉镜1 台,搭建一个气道异物淤积可控的呼吸过程模拟平台。气道异物淤积采用管路阻塞标准件和超声耦合剂2 种方式模拟,对应的呼吸过程模拟平台分别如图1a 和图1b 所示。

图1 呼吸过程模拟平台
2 研究过程
2.1 平台搭建与参数设置
在模拟平台开展实验时,通过向模拟气道置入阻塞标准件或通过注射器向模拟气道注射超声耦合剂来模拟气道异物淤积。阻塞标准件封堵气道面积大小和超声耦合剂量的多少代表气道异物淤积程度(阻塞程度)。每种情况下均设置呼吸机采用压控模式和容控模式分别进行通气,同时采集每种阻塞程度下对应的呼吸波形,提取波形特征,根据阻塞标准件实验数据拟合气道阻塞面积与呼吸波形特征之间的关系曲线,再用超声耦合剂实验数据验证拟合曲线的精度并遴选最优拟合关系曲线,技术路线如图2 所示。
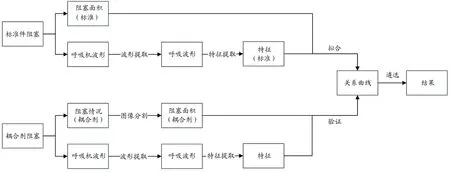
图2 技术路线图
气道管路阻塞标准件直径较管路内径小1 mm,以便将其放置到管路中。设置圆环和3 个支架作为支撑结构,以免实验中标准件受呼吸气流影响从而在管路中移位导致阻塞面积偏差。由于管路内径为圆形,为便于控制阻塞面积,标准件实体部分采用扇形结构。管路阻塞面积与管路横截面积占比依次为1/6、2/6、3/6、4/6、5/6,标准件结构如图3 所示。

图3 标准件结构上下二等角轴测示意图及不同阻塞面积标准件后视图
呼吸机压控通气模式的关键参数设置如下:呼气终末正压(Positive End-Expiratory Pressure,PEEP)设为5 cmH2O;吸气压力(Pinsp)设为20 cmH2O;吸入氧浓度分数(FiO2)设为21 Vol%;呼吸频率(Respiratory Rate,RR)设为12 次/min;吸气时间(Ti)设为1.4 s;呼气时间(Te)设为3.6 s;压力上升时间(Slope)设为0.2 s;患者类别选成人。呼吸机容控通气模式关键参数设置如下:PEEP 设为5 cmH2O;潮气量设为500 mL;FiO2设为21 Vol%;RR 设为12 次/min;Ti 设为1.4 s;Te 设为3.6 s;Slope 设为0.2 s;患者类别选成人。
2.2 气道异物淤积分析
阻塞标准件模拟气道异物淤积情况下的气道阻塞面积在设计标准件时已确定,不用再单独计算。超声耦合剂模拟气道异物淤积情况下的气道阻塞面积需通过图像处理等方法单独分析。因为在此类模拟场景下,每次通过注射器向模拟气道内注射耦合剂的量无法精确控制,且注射到模拟气道内的耦合剂形状不规则,故每次注射完耦合剂后需将可视软性喉镜镜头伸入到模拟气道内固定位置拍摄阻塞场景照片,再获取对应的呼吸波形。针对阻塞照片采用图像分割算法识别阻塞面积。因耦合剂的透明性导致MATLAB 程序在识别时精确度不高,故先手动勾画出阻塞区域,再通过程序识别转化为灰度图像,最后计算阻塞面积。
2.3 呼吸波形提取
由于数据的保密性,呼吸机的压力、流速和容量数据无法直接导出,故采用呼吸机自带的截屏功能获取对应的呼吸波形截图。对截图进行裁剪后,通过MATLAB程序识别呼吸波形对应的灰度值及波形横坐标位置,再将像素数转为具体数值,从而实现呼吸波形的提取。针对压力波形基本呈现周期性的方波,提取方波宽度和方波峰值2 个特征;流速波形基本呈现周期性的上下2 个尖峰,提取上升峰值、上升梯度、下降峰值和波形宽度4 个特征;容量波形基本呈现周期性的三角波,其数值近似为流速的积分结果,提取波形宽度和波形峰值2 个特征。各波形特征示意图如图4a~c 所示。

图4 各波形特征示意图
2.4 波形特征变化与相关性分析
呼吸波形各特征根据气道阻塞面积的变化程度采用变异系数来衡量。当变异系数≤10%时为弱变异性,当10%<变异系数≤100%时为中等变异性[12-13]。遴选标准件阻塞和耦合剂阻塞2 种情况下均呈现中等变异性的波形特征进行其与阻塞面积的Spearman 相关系数计算。分析相关性,相关系数绝对值为0.8~1.0 表示强相关,0.5~0.8 表示中度相关,0.3~0.5 表示相关性较低,0~0.3表示相关性极弱[14-15]。根据标准件阻塞情况下阻塞面积的比值及对应的各呼吸波形特征值,用MATLAB R2021b 基于最小二乘法[16-17]拟合关系曲线,再计算耦合剂阻塞情况下阻塞面积的比值及对应呼吸波形特征值与上述拟合关系曲线的均方根相对误差,遴选均方根相对误差较小的拟合关系曲线,并描述气道异物淤积量与呼吸波形改变之间的关联,从而设定基于可视化与图像识别技术的不同程度气道阻塞报警阈值。
3 研究结果
采用压控通气模式时,在标准件阻塞的情况下进行6 组实验(包含1 组没有置入阻塞标准件的基准情况),即每个波形特征有6 组数据;在耦合剂阻塞的情况下也进行6 组实验,每次随机向模拟气道内注射一定量的耦合剂,同样获取了不同阻塞程度下每个波形特征的6 组数据。采用容控通气模式时,在标准件阻塞情况下进行6 组实验(同上),耦合剂阻塞情况下进行7 组实验。通过计算组内变异系数,排除变化不大的波形特征,最终遴选出变化较大的波形特征并进行曲线拟合与对比分析。
3.1 波形特征变异系数
计算不同通气模式和不同阻塞情况下各组波形特征数据的变异系数,见表1。采用压控通气模式时,流速波形上升峰值、流速波形上升梯度和流速波形下降峰值3 个特征在2 种气道阻塞情况下,均呈现出随阻塞面积变化的中等变异性。采用容控通气模式时,流速波形上升峰值、流速波形上升梯度、流速波形下降峰值和容量波形宽度4 个特征在2 种气道阻塞情况下,均呈现出随阻塞面积变化的中等变异性。

表1 各波形特征变异系数(%)
3.2 压控通气模式关系曲线
根据变异系数,对压控通气模式下3 组波形特征数据与气道阻塞面积的相关性进行分析,结果如表2 和图5 所示。表2 为压控通气模式下各波形特征与阻塞面积比值的相关系数、特征曲线与拟合曲线之间的均方根相对误差及拟合曲线关系式的系数,图5 为标准件阻塞和耦合剂阻塞情况下的各波形特征曲线,以及各波形拟合曲线。结果表明,上述3 组波形特征与气道阻塞面积均有强相关性,且标准件阻塞和耦合剂阻塞2 种情况下,各波形特征曲线与拟合曲线间的均方根相对误差均较小,即可用波形特征变化描述气道阻塞程度,也可用气道阻塞面积反映波形特征变化量。对比相关系数和均方根相对误差,并结合波形特征曲线,本实验中流速波形上升峰值最能反映气道阻塞情况,两者为二次曲线关系。以气道阻塞面积比值为自变量,波形特征值为因变量,其拟合曲线关系式系数如表2 所示。

表2 压控通气模式波形特征相关系数、曲线均方根相对误差与拟合曲线关系式系数
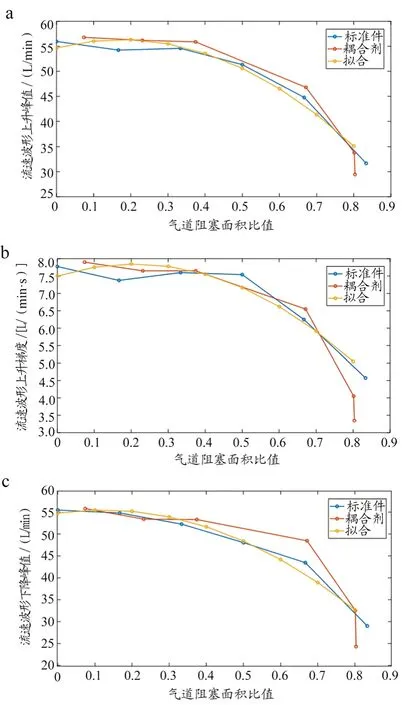
图5 压控通气模式下各波形特征的关系曲线
3.3 容控通气模式关系曲线
容控通气模式关系曲线分析结果如表3 和图6 所示。除耦合剂阻塞情况下,容量波形宽度与气道阻塞面积呈中等程度相关性外,其他波形特征与气道阻塞面积均呈强相关性。同理,对比相关系数和均方根相对误差,并结合波形特征曲线可知,容控通气模式下,流速波形上升峰值最能反映气道阻塞情况。

图6 容控通气模式下各波形特征的关系曲线
4 讨论
关于气道梗阻导致的呼吸波形改变,已有相关研究发表,杜叶平[18-19]的研究表明,阻塞性通气障碍患者在正压通气时,根据通气障碍类型不同,其呼吸波形可出现不同的典型特征,在压力、容量、流速曲线和压力-容量环上有明显的特征性改变,并指出利用呼吸波形监测对分泌物进行定位的可能;潘清等[20]和马树[21]开展了基于小波的呼吸机管路积液自动检测算法研究,通过对管路积液情况下呼吸机的气道压力波形进行小波分解和重构,进而提取波形特征,判断并自动提示发生积液的情况,测试结果表明,该判断准确率最高能达97.2%,提供了一种呼吸机管路内发生积液情况的判定方法。前人的研究更多关注通过呼吸波形变化推测阻塞性通气障碍是否发生及阻塞的大致位置,关于阻塞程度的推测与判断则少有提及。本文通过模拟试验,用最小二乘法等方法建立气道阻塞程度与呼吸波形特征之间的定量关系,从全新的视角进一步探索了呼吸波形在气道管理中的重要临床价值。
本实验表明,气道异物淤积量(阻塞程度)与部分呼吸波形特征之间有强相关性,而波形特征在临床上代表着相应的生理意义,如流速波形横轴上方代表吸气流速,横轴下方代表呼气流速,若临床认为流速波形上升峰值降到其基准值的1/3 或2/3 时需要进行报警提示,则可根据上述关系式求出对应的气道阻塞面积比值。未来可利用图像识别技术实时监测气道阻塞情况,当阻塞程度达到设定值而波形特征还未发生改变时即发出对应等级的声光报警。
此外,虽然实验结果表明,压控通气模式和容控通气模式下均是流速波形上升峰值最能反映气道阻塞程度,但并不代表该波形特征就是最优选择。一是因为上述实验仅模拟了没有自主呼吸状态的单独机械通气场景,没有覆盖所有临床真实场景;二是波形特征选择应结合临床具体生理意义,而不仅仅只考虑数值的相关性与变化趋势;三是每次实验中耦合剂形状可能会在通气过程中受实时气流的影响而改变,即同一次实验中拍气道阻塞情况照片时耦合剂的形状和采集呼吸波形时耦合剂的形状可能会不一致,从而带来实验误差。如上述结果中,耦合剂阻塞情况下个别数据差异较大,在只考虑标准件阻塞情况时,上述7 组波形特征均与气道阻塞程度有强相关性,且压控通气模式和容控通气模式下均为流速波形下降峰值的相关性最强。
5 结论
本文通过开展气道异物淤积导致呼吸波形改变的临床模拟研究,发现无自主呼吸时,机械通气波形受气道阻塞程度影响明显,压控通气模式和容控通气模式下流速波形上升峰值、流速波形上升梯度和流速波形下降峰值3 个波形特征,均与气道阻塞面积有强相关性,且其相关关系均可用二次曲线描述,验证了气道实时可视化和数字化监测的可能性,以及将麻醉医师对患者气道通气参数的观察工作转化为机器图像识别与报警的可能性,为人工气道管理提供一种新的思路。后续可开展针对不同年龄段、不同体型患者、不同气道情况、不同通气设备的有自主呼吸时气道异物淤积导致呼吸波形改变的临床模拟研究,结合呼吸波形的临床生理意义,以更逼近临床真实场景,进一步论证上述方案的可行性,探索气道管理新模式。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05
机械工业标准化与质量(2022年4期)2022-08-12
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
大众科学(2020年7期)2020-10-26
小天使·六年级语数英综合(2018年1期)2018-10-08
电子制作(2017年19期)2017-02-02
电子世界(2016年24期)2016-03-10
汽车零部件(2014年5期)2014-11-11
组合机床与自动化加工技术(2014年12期)2014-03-01
中国质量与标准导报(2014年1期)2014-02-28