
基于云平台的新能源汽车通信网络定位技术
2024-05-13 02:23张佳佳
通信电源技术 2024年4期
张佳佳
(商丘职业技术学院校地合作处,河南 商丘 476000)
0 引 言
在新能源汽车通信网络中,定位技术至关重要。通过准确获取车辆的位置信息,可以实现导航、交通管制、车辆调配等功能,从而提高道路的利用效率,优化交通流量,提升用户体验。云平台作为一个强大的计算和存储资源集合,对于新能源汽车通信网络定位技术的发展和应用具有重要影响。
云平台提供了大规模数据处理和分析的能力,能够接收和处理来自不同车辆与其他交通设备的定位信息。通过云平台的计算能力和分布式存储,可以实时整合与分析海量的位置数据,为交通管理部门提供更准确的交通状况和预测信息,为车主提供更智能的导航和交通建议。基于此,文章提出一种基于云平台的新能源汽车通信网络定位技术。在该技术的研究过程中,重点关注通信技术的发展和创新。利用物联网技术,通过车辆信号传感器、无线通信模块和云平台的结合,可以实现更准确、更稳定的定位。充分利用云平台的计算和存储资源,结合通信技术的创新与发展,实现对新能源汽车的准确定位。
1 云平台下新能源汽车通信网络定位
1.1 云平台下汽车位置数据采集与通信
新能源汽车通信网络定位技术的应用是依托云平台内所部署的数据应用服务,通过云平台提供的应用程序接口,获取云平台上部署的全球定位系统(Global Positioning System,GPS)设备的数据信息,将其存储到云端的同时将数据传输到新能源汽车通信网络终端,完成GPS 设备与新能源汽车通信网络的交互[1]。云平台由多个云端服务器组成,对于新能源汽车通信网络定位,其具有GPS 数据存储层、数据服务层以及分析管理层3个功能层,具体内容如下。
第一,GPS 数据存储层。由GPS 设备采集新能源汽车的位置数据,并由远程无线通信网络将其传送至云端服务器,以完成数据格式的变换,利用消息队列遥测传输(Message Queuing Telemetry Transport,MQTT)协议将其传送至云端,然后,采用云端数据库与本地数据库并行的方式进行数据存储[2]。
第二,数据服务层。新能源汽车GPS 数据上传至云端,通过在云平台上搭建模型,实现对新能源汽车通信网络的定位,并对其进行可视化展示[3]。
第三,分析管理层。通过分析汽车GPS 数据,确定汽车在地图上的具体位置,为新能源汽车通信网络定位提供数据基础。云平台下新能源汽车的GPS数据传输如图1 所示。

图1 云平台下新能源汽车GPS 数据传输
采集和传输汽车GPS 数据,在云平台上创建产品和添加设备,采用蜂窝模式连接汽车通信网络[4]。创建完产品后,在云平台网关中心添加GPS 设备,选中联网的GPS 设备名称,云平台会自动生成设备三元组,表达式为
式中:U为云平台上GPS 设备三元组;PK为设备钥匙;DN为设备名称;DS为设备密码。利用生成的三元组将GPS 设备接入云平台,GPS 设备可以在云平台上进行通信。GPS 设备采集到新能源汽车的坐标数据后,采用Topic 定义云平台上云端与GPS 端的通信格式。根据Topic 定义将汽车GPS 数据传输到云平台上,用于后续新能源汽车的地图匹配。
1.2 新能源汽车地图匹配
在云平台下的汽车位置数据采集与通信结果基础上,为新能源汽车位置进行地图匹配。该过程实际为新能源汽车通信网络定位的校正过程。用一个均匀位置概率分布函数约束新能源汽车可能活动的区域,将汽车位置映射到新能源汽车通信地图上。匹配公式为
式中:P(x,y)为新能源汽车的地图匹配结果;k为常数,表示匹配地图;0 为不匹配地图;N为新能源汽车的活动区域范围。
1.3 新能源汽车通信网络差分定位
在新能源汽车通信网络中,已知基站的位置、基站向GPS 设备发射信号的时间、GPS 设备向基站反馈信号的时间,计算GPS 信号发射与接收时间差为
式中:T为GPS 信号传输时长;t0为GPS 设备向新能源汽车通信网络基站发射信号的时间;t1为新能源汽车通信网络基站接收到GPS 信号的时间[9]。根据信号传输速度,得到GPS 设备载体新能源汽车与基站距离变化长度为
式中:H为GPS 设备载体新能源汽车与基站距离变化长度;v为GPS 信号的传输速度。假设新能源汽车与通信网络基站在同一个二维坐标平面内,根据新能源汽车通信网络的基站坐标,得到新能源汽车的坐标为
式中:xo为原点横坐标;yo为原点纵坐标;xe为新能源汽车通信网络的基站横坐标;ye为新能源汽车通信网络的基站纵坐标;xb为当前新能源汽车在二维坐标系中的横坐标;yb为当前新能源汽车在二维坐标系中的纵坐标。
将基站坐标和原点坐标代入式(5),即可得到新能源汽车的位置坐标。如果该坐标在新能源汽车活动范围内,则将该点映射到新能源汽车通信网络地图上;如果该坐标不在新能源汽车活动范围内,则不能将该点映射到新能源汽车通信网络地图上。利用经验校正系数校正定位坐标,再重新映射,直至定位点成功映射到地图上为止。将定位结果通过地图进行可视化展示,以此实现基于云平台的新能源汽车通信网络定位。
2 实验分析
选择20 台新能源汽车为研究对象,在汽车上安装GPS 设备,并与汽车通信网络联网。将该20台新能源汽车作为车载终端,配置华为公司生产的云平台为云端。云平台具有10 个计算节点,均配有Windows 2010 操作系统、X 86 架构、12 GB 内存以及Intel Core i8 处理器,汽车通信网络基准带宽为1.52 Gb/s。新能源汽车在道路上匀速行驶,行驶时间为70 min,行驶速度为10 km/h。GPS 设备共采集到1.62 GB 数据,通过数据处理与分析,定位新能源汽车在地图中的位置。随机选择1 台新能源汽车,其通信网络定位结果如表1 所示。

表1 新能源汽车通信网络定位结果 单位:m
由表1 可知,新能源汽车通信网络定位结果与真实位置存在较小偏差。本文方法的定位结果更接近真实位置,有助于提高定位的精确度。在复杂的道路和环境条件下,稳定的定位结果能够确保车辆的导航和行驶更可靠,减少因定位误差导致的误判和误操作。在面对各种复杂环境和通信条件时,本文方法能够提供相对稳定的定位结果,降低因定位误差导致的安全风险。为凸显本文技术在新能源汽车通信网络定位中的性能,对比本文技术与文献[5]技术(考虑通信时延的智能网联汽车协同定位技术)、文献[6]技术(一种城市环境下GNSS/MEMS IMU 车载实时精密定位方法技术),利用定位偏移率定性分析3 种技术的定位结果[5-6]。定位结果比真实位置小,表示负偏移;定位结果比真实位置大,则表示正偏移。参照实验中记录的新能源汽车通信网络定位结果,计算出3 种技术的定位偏移率,其计算公式为
式中:D为新能源汽车通信网络的定位偏移率;α为新能源汽车通信网络定位的正偏移量;β为新能源汽车通信网络定位的负偏移量。定位偏移率值越大,新能源汽车通信网络定位精度越低,定位偏差越大。实验选取10 台新能源汽车,其定位偏移率计算结果如表2 所示。
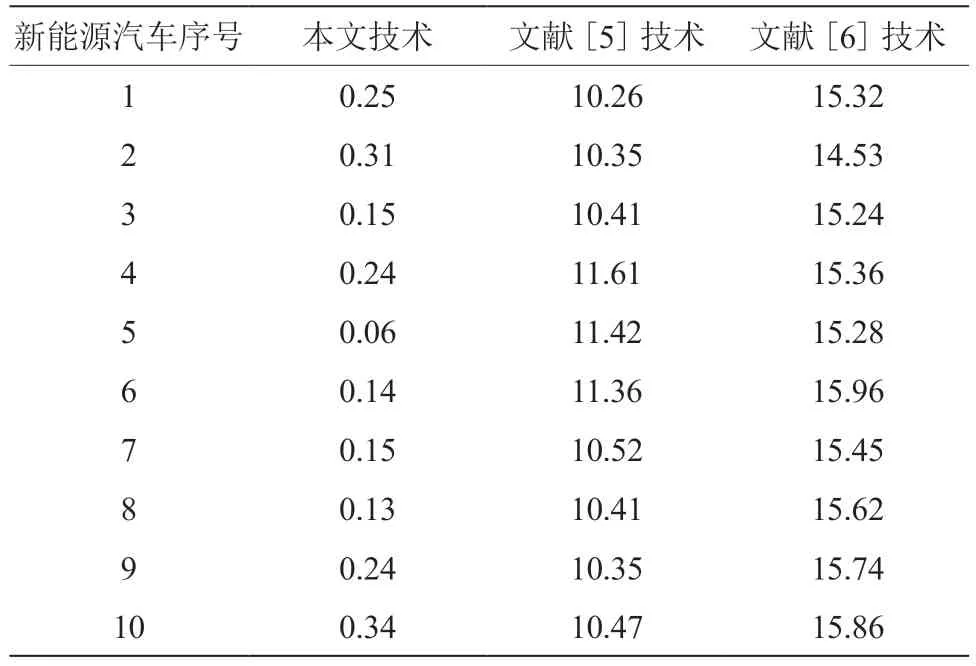
表2 新能源汽车通信网络定位偏移率计算结果 单位:%
由表2 可知,对于新能源汽车通信网络定位,3 种技术均存在定位偏移问题。但是本文技术的定位偏移率较低,平均定位偏移率为0.201%,说明本文技术定位结果基本与新能源汽车实际位置一致。文献[5]技术的平均偏移率为10.716%,文献[6]技术的平均偏移率为15.436%,均高于本文技术。通过对比分析,证明了本文技术能够实现对新能源汽车通信网络的精准定位。
3 结 论
云平台的新能源汽车通信网络定位技术是一种基于云计算手段的创新型解决方案。该技术利用云平台作为数据存储和计算的核心,通过与新能源汽车通信网络的无缝结合,实现对车辆位置信息的精准定位和持续跟踪,为车辆运营管理和智能交通系统提供重要支持。在未来的研究中,可以继续深入研究如何提升定位精度,强化车联网通信,从而进一步提高数据安全性。
猜你喜欢
现代装饰(2020年5期)2020-05-30
探索科学(2017年4期)2017-05-04
丝路艺术(2017年5期)2017-04-17
初中生(2017年3期)2017-02-21
小学生优秀作文(趣味阅读)(2017年3期)2017-02-11
瞭望东方周刊(2016年40期)2016-11-02
中国交通信息化(2016年8期)2016-06-06
移动通信(2015年17期)2015-08-24
发明与创新(2015年29期)2015-02-27
风能(2015年4期)2015-02-27
