基于TLS 技术的城市地铁工程测量研究
2024-05-12 03:23孙冬冬
工程建设与设计 2024年8期
孙冬冬
(北京住总集团有限责任公司土木工程建设总承包部,北京 100029)
1 引言
城市地铁系统作为一种快速、便捷、大容量的公共交通方式,越来越成为现代城市交通规划的核心组成部分。 然而,城市地铁工程的规模和复杂性也随之增加,对其设计、建设和维护提出了更高的要求[1-2]。 传统的测量方法在应对这些挑战时作用有限,难以满足对地铁工程高精度、高效率测量的需求。因此,研究以三维激光扫描(3D Terrestrial Laser Scanning,3D TLS)技术为基础,利用激光束的非接触性扫描,快速、准确地获取大范围的三维点云数据, 旨为地铁工程提供准确的几何数据,帮助精确设计、施工和维护,提高整个地铁系统的运行效率。
2 城市地铁工程测量中三维激光扫描技术分析
2.1 三维激光扫描技术应用与优势分析
三维激光扫描技术是一种新型的测量技术, 其利用激光测距和精确角编码器获取目标物体的三维坐标。 三维激光扫描技术的基本原理是, 通过激光测距和精确角编码器测量目标物体的三维坐标。 激光测距仪发射激光束,打到目标物体上后反射回来,通过测量激光束往返时间计算距离。 同时,角编码器可以精确测量激光束的角度, 从而计算出目标物体在三维空间中的坐标[3]。 与传统的测量技术相比,三维激光扫描技术具有高效率、高精度、非接触、数字化、自动化等优点,可以在短时间内获取大量目标物体的三维坐标数据, 并且可以对数据进行自动处理和分析,大大提高测量效率和精度。 因此,研究将三维激光扫描技术应用于城市地铁工程测量。
三维激光扫描技术的应用流程包括以下步骤。 首先,选择测量场景,如地铁站台、隧道等。 然后,安装激光扫描仪器并确保覆盖整个测量区域。 在扫描过程中, 激光仪器记录点云数据,随后进行数据处理、配准,消除可能存在的误差,再利用处理后的点云数据生成三维模型,将其转换为可视化的形式。 通过时间序列数据进行结构变形监测,实时发现问题。 比对三维模型与设计模型,监测设备运行状态,提高设备维护效率。 建立数字孪生模型,整合其他工程数据进行模拟和优化,支持规划和决策。 进行数据管理与可视化,建立综合数据库,生成测量报告,为决策者提供翔实的测量数据支持。
三维激光扫描技术在城市地铁工程中展现出了多方面的显著优势。 首先,其高精度测量能力能为地铁工程提供准确的三维坐标数据,有力支持工程的精细设计和施工。 其次,相较于传统方法, 激光扫描技术以高效快速的数据采集速度脱颖而出,有效提高了测量效率。 非接触式测量特性保护了地铁结构的完整性,避免了潜在的损伤。 全方位数据获取能够覆盖难以到达的区域,为工程提供更为全面的信息。 实时监测和分析功能使得工程管理者能够及时响应潜在问题, 提高工程的安全性和可靠性。 此外,支持数字孪生模型的建立,为地铁系统的规划和决策提供了有力的工具。 适用于复杂环境的特性使激光扫描技术在各种场景下表现卓越。 最终,其综合数据管理能力通过整合不同数据源,建立综合数据库,为数据管理和可视化提供便利。
2.2 三维激光扫描技术中点云数据处理
点云数据处理是三维激光扫描技术的关键环节, 对于提高数据质量、准确性和可用性,以及支持后续的建模、分析和决策过程至关重要。 因此, 研究针对点云数据的处理做出分析。 点云数据处理主要步骤如图1 所示。
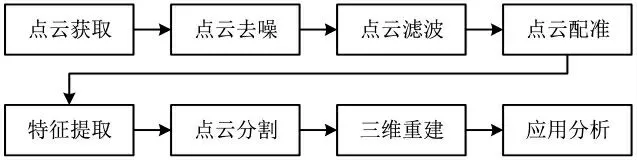
图1 三维激光扫描技术中点云数据处理步骤
由图1 可知,点云数据的处理包括8 个步骤。 首先是通过激光扫描仪等设备获取场景的三维坐标点信息, 然后进行去噪操作以排除干扰点。 随后,通过滤波方法进一步清理数据。配准步骤用于将不同位置的点云对齐, 以确保它们处于同一坐标系。 特征提取和点云分割有助于识别场景中的有意义特征和分割出相似属性的子集。 通过三维重建,离散的点云数据被转换为具有几何形状和结构的三维模型。 最后,利用处理后的点云数据进行具体的应用分析。
其中,点云获取与点云配准为最重要的步骤,点云获取涉及使用激光扫描仪或其他传感器来采集环境中的点云数据。点云的获取质量直接关系到后续处理的结果。 如果获取的点云数据不准确或者缺乏必要的信息, 那么后续的处理步骤就会受到影响,导致最终的三维模型不准确。 而在不同的扫描位置或者不同的时间点获取的点云需要进行配准, 即将它们对齐到同一坐标系中。 点云配准的准确性直接关系到最终生成的三维模型的精度。 如果配准不准确,可能导致点云中存在偏差,影响后续的结构分析、模型生成以及其他应用。
针对点云数据获取, 研究选择安博格定位法(Amberg Position Method,APM)。 传统方法通过在扫描仪前后任意摆放3 个以上的标靶球,并使用扫描仪测定它们的三维坐标来实现配准。 然而,这种方法存在布设位置不固定和高程精度相对较低的问题。 相反,APM 定位法采用全站仪与扫描仪结合使用,通过全站仪获取标靶球与双棱镜基座的点位坐标, 从而实现点云坐标在扫描仪内部坐标系与地铁坐标系的统一。 这种方法提高了外业效率,简化了工作流程,并通过双棱镜的定位基座和球形棱镜的组合定位, 有效减少了每一站点云扫描数据的系统误差累积,保证了整体点云的外符合精度。
针对点云数据配准,研究采用全站仪测定靶球中心坐标,扫描仪拟合靶球中心坐标以及坐标转换的方法, 通过全站仪获取球形棱镜的地铁坐标数据, 然后通过扫描仪拟合靶球中心坐标,最终实现多站点云数据的配准。 具体步骤包括全站仪测定靶球中心坐标, 通过扫描仪获取球形棱镜的点云数据并拟合球体,然后利用拟合靶球坐标进行坐标转换。 全站仪和扫描仪获取的数据相结合, 通过六参数配准方法计算旋转平移参数,将所有的点云数据转换到统一的坐标系下,实现点云数据的统一配准与自动拼接。
3 基于TLS技术的城市地铁工程测量项目分析
为验证三维激光扫描技术在城市地铁工程测量项目中的实用性,研究针对北京市某地铁站进行测量。 所用设备包括戴尔计算机工作站(2 台,用于点云数据的处理与分析),全站仪TS60(1 台,测角精度0.5″,测距精度1 mm+1×10-6D,D 为全站仪实际测量的距离,km),球棱镜(1 个,配合APM 定位使用),2 m 水准标尺(2 个,用于测量垂直高度),脚架(3 个,用于设备支撑),Faro Focus3D 330 三维激光扫描仪 (1 台, 测距精度±2 mm,测量距离330 m),APM 定位基座(1 个,用于扫描仪的绝对定位), Leica 常规棱镜组 (3 组, 用于反射和定位),Leica 圆棱镜 (3 个,2 个用于APM 基座, 一个用于全站仪定向),水准仪DNA03(1 台,精度0.3 mm/km)。
研究开始前,首先进行详细的现场踏勘,以全面了解地铁站点的实际情况。 这涉及对地铁结构及周边环境的形态、大小和关键属性进行分析,从而确定扫描站点、绘制扫描规划草图以及设计最佳扫描路线的整体方案。 踏勘考虑了工作路径的明确性,以及避免外界因素对扫描作业的影响。 同时,根据实验要求确定了适当的扫描站点和目标距离。 随后,布设和测量控制点, 其中包括平面控制测量和高程控制测量两个主要方面。 在平面控制测量中,采用城市控制点作为测量的起始边,通过支导线的方式将测量连接车站内的加密点。 高程控制测量则采用二等水准测量, 通过闭合水准路线的方式将测量连接车站内的高程加密点。 表格详细列出了这些控制点的城市坐标和地铁坐标, 为后续的扫描作业提供关键的基础。
在实际扫描操作中,需注意明确工作路径,防止外界因素的干扰,确保扫描站点的均匀分布。 操作中包括仪器的组装和参数设置,扫描仪和标靶球的安置,以及分站式扫描工作的具体操作。 所有这些步骤和注意事项旨在保证扫描作业的准确性和高效性,为后续的数据采集和分析奠定坚实基础。 研究共测量40 个地铁隧道横断面,并将测量结果与地铁建造时的设计数据进行对比,首先计算得出其椭圆度T 值,此指标量化椭圆形状的偏离程度, 可以反映隧道横断面整体的形状变化情况。 其次将测量结果与地铁建造时的设计数据进行对比得到拟合度。 具体结果如图2 所示。
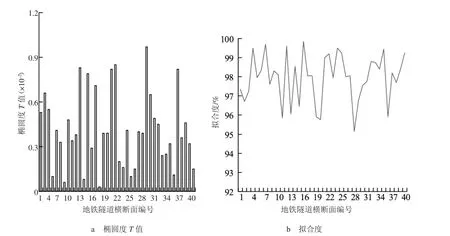
图2 三维激光扫描技术在地铁工程测量项目中的结果
由图2 可知,40 个地铁隧道横断面的椭圆度T 值范围在6×10-4~1.04×10-2,拟合度均在95.00%以上。表明隧道横断面整体呈现出较小的椭圆度变化,且测量结果的拟合度较高,与横断面的设计形状较为接近。 但要注意28 号与36 号等几个横断面的T 值较大,拟合度较低的位置,数据说明这些位置的地铁隧道横断面形变较大,在后续监测测量中应该重点关注,防止出现意外,影响城市地铁的正常运营。
4 结论
三维激光扫描技术在城市地铁工程中具有显著的优势,包括高精度、高效率、非接触、数字化、自动化等特点。 研究提出以APM 定位法为基础云数据获取方法,以及点云数据配准方法。最后研究针对北京某地铁站进行实地测量工作。通过详细的现场踏勘、控制点布设和测量,以及椭圆度和拟合度的分析,测量结果表明,40 个地铁隧道横断面的椭圆度T 值范围在6×10-4~1.04×10-2,拟合度均在95.00%以上,表明整体呈现出较小的椭圆度变化,且测量结果与设计形状接近。 然而,一些特定位置的地铁隧道横断面形变较大,拟合度较低,需要在后续监测中重点关注。
综上所述, 三维激光扫描技术在城市地铁工程中的应用为工程测量提供了一种高效、精确的解决方案。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
工程建设与设计(2021年11期)2021-07-28
少儿美术(快乐历史地理)(2020年4期)2020-02-24
学苑创造·A版(2019年4期)2019-05-10
中华老年口腔医学杂志(2016年6期)2017-01-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
中国感染控制杂志(2015年7期)2015-12-13
现代营销·经营版(2015年3期)2015-04-20
中国当代医药(2015年17期)2015-03-01
物理实验(2015年8期)2015-02-28