基于改进的YOLOv5 算法的无人机巡检图像绝缘子检测的研究
2024-05-03 05:42张润贤陈志新赵山尧
信息记录材料 2024年3期
张润贤,贾 江,陈志新,赵山尧
(新疆信息产业有限责任公司 新疆 乌鲁木齐 830001)
0 引言
无人机巡检图像绝缘子检测是一个新兴的研究领域,它借助无人机和图像处理技术,旨在实现对电力输电线路中绝缘子状态的自动监测与评估[1]。无人机巡检图像绝缘子检测技术的研究和应用不仅能够提高电力输电线路的安全性和稳定性,降低人力资源消耗和线路巡检成本,还可推动电力行业的智能化、自动化发展。然而,由于环境的变化、污染、老化以及事故等因素,绝缘子可能会出现损坏、破裂、污染等问题,降低其绝缘性能,进而引发线路故障、事故甚至导致停电等问题[2]。
电力输电线路通常呈现出线性布局、分布广泛和地形复杂等特点,传统人工巡视存在耗时长、成本高等问题,无法满足快速、全面巡检的需求,引入无人机巡检技术可以大幅提升巡检效率和覆盖范围[3-4]。随着计算机视觉和图像处理技术的快速发展,人们可以利用图像处理算法对无人机拍摄到的绝缘子图像进行分析和处理,以实现自动检测和评估绝缘子的状态。边缘检测、纹理分析、形态学处理等算法可以有效地检测污染、破损、老化等绝缘子问题[5]。无人机在飞行稳定性、操控性以及负载能力等方面的不断提高,使得其成为执行绝缘子巡检的理想工具。无人机可以搭载高分辨率相机,能够在低空快速飞行并获取高清绝缘子图像,同时还能避免人工巡检可能存在的危险和困难[6]。
1 目标检测算法
Redmon 等[7]在2016 年提出了一种快速而准确的目标检测算法(you only look once, YOLO),将输入图像分为一个固定网格,在每个网格单元中预测目标的边界框和类别。与传统的滑动窗口方法相比,YOLO 可以在图像中一次性获取丰富的信息,从而实现实时目标检测。此外,YOLO 通过使用卷积神经网络来端到端地进行目标检测,避免了多个阶段处理和中间阶段的错误累积。Redmon等[8]在2017 年提出了YOLOv2 算法,采用更深的网络结构,首先,使用了更多的卷积层和残差连接,以提取更丰富的特征。其次,引入了Anchor Boxes(先验框),在不同比例的先验框上进行目标检测和定位,从而提高了小物体的检测精度。最后,引入了多尺度训练和预测,以增强对不同尺度目标的检测能力。王万国等[9]提出的YOLOv3 算法,采用了更深的Darknet backbone 网络,使得模型的感受野更大,能够更好地理解图像上下文,用于处理不同尺度的特征图,并融合不同层级的特征以获取更全面的目标信息。此外,使用三种不同尺度的先验框来进行目标检测,并使用不同的特征层来预测不同尺度的目标。2020 年,Bochkovskiy 等[10]推出了YOLOv4 算法,在检测小目标方面的性能有了极大提升。
2 YOLOv5 算法
YOLOv5 的网络结构主要由CSPDarknet53 主干网络和多个特征金字塔层组成,这些特征金字塔层用于融合不同尺度的特征来进行物体检测。YOLOv5 通过CSPDarknet53 主干网络提取特征,通过空间金字塔池(spatial pyramid pooling, SPP)层、路径聚合网络(path aggregation network, PAN)模块和检测头进行特征融合和目标检测,能够有效地提高检测性能并保持较高的实时性,如图1 所示。

图1 YOLOv5 网络结构图
(1)CSPDarknet53 主干网络。CSPDarknet53 主干网络是YOLOv5 中的主要特征提取网络,由交叉阶段部分(cross stage partial, CSP)结构和Darknet53 层组成。CSP结构通过将输入特征图拆分成两条路径,一条路径进行卷积操作,另一条路径进行残差连接,然后将两条路径的特征图进行拼接,这样可以增强特征的表征能力。
(2)SPP 层。SPP 层用于捕捉不同尺度的特征。它通过将输入特征图分成不同大小的网格,并在每个网格上进行池化操作(最大池化),最后将池化结果拼接在一起,形成一个固定长度的特征向量。
(3)PAN 模块。PAN 模块用于融合不同尺度的特征图。它通过将高分辨率的特征图下采样和低分辨率的特征图上采样,再进行特征融合,从而在不同尺度上获取更全局和细节的信息。PAN 模块由两个操作组成,一个是上采样和特征融合,另一个是跳跃连接。
(4)检测头。检测头是YOLOv5 中用于预测目标位置和类别的部分。它从各个特征金字塔层中获取特征,并通过卷积层和上采样层进行处理,最后输出包含目标框位置和类别的预测。此外,引入P-MVS(point-wise multi-view system)卷积操作,通过在不同尺度上对特征进行多视图采样和处理,扩展特征的感受野,可以更好地捕捉目标的细节和上下文信息。
3 基于改进YOLOv5 算法的绝缘子设备识别
3.1 Mosaic-9 数据增强
在进行绝缘子设备识别过程中,由于不同尺寸的目标在数据中被标注的数量比例不相同,往往小尺寸的目标所占的比例更大些,而中尺寸和大尺寸的目标分布比较均匀。一般来讲,Mosaic 是通过将四张不同的图像拼接在一起,形成一个大尺寸的合成图像,然后在该合成图像上进行随机裁剪和缩放,以生成新的训练样本[11]。本文中采用Mosaic-9 数据增强方法,将九张图片进行裁剪缩放拼接,相比之前的Mosaic 方法,因为每个合成图像都可以生成多个不同的训练样本,因此能增加更多的训练数据。
3.2 FReLU 激活函数
在之前的卷积神经网络中,使用普通的卷积层很难获得空间上的相关性,而使用复杂的卷积操作会让算法的运行结果受到影响,为此使用FReLU(漏斗激活)来替代YOLOv5 算法中的ReLU 和PReLU,PReLU 可以使用公式y=max(x,T(x)) 来表示,式中T(·) 是二维空间条件,利用正则卷积的方式来获取空间上的可视化布局。
3.3 Pixels-IoU 损失函数
在目标检测领域中,交并比(intersection over union,IoU)及其变体是非常常见的评估指标,在YOLOv5 算法中,使用损失函数GIoU 来增加对错误框的处理机制,以此取得较好的检测结果,其原理可以使用式(1)表示:
但是GIoU 仍然存在很大问题,在面临复杂的目标检测环境时,GIoU 会有定位不够准确等问题,减慢网络的收敛速度,因此,本文使用一种新的损失函数Pixels-IoU 来替代原始模型中的GIoU,Pixels-IoU 通过对边界角度的优化来提高精度,已经有实验表明Pixels-IoU 能够在不同数据集中展示出良好的检测性能。Pixels-IoU 具体可以使用式(2)表示:
式(2)中,M代表所有正样本,|M|为正样本的数量,b和b′分别表示目标框与真实目标。
4 实验分析与评价
本文中首先使用LabelImg 软件对拍摄的图像进行标注,其次将标签转换成Pascal VOC 数据格式进行训练,最后得到的结果如表1 所示。结果显示改进后的YOLOv5算法在精度和准确度上都得到了提升,同时每秒传输帧数实验结果表明检测速度相比原始的YOLOv5 也有很大进步,已经能够满足日常实时检测的要求。
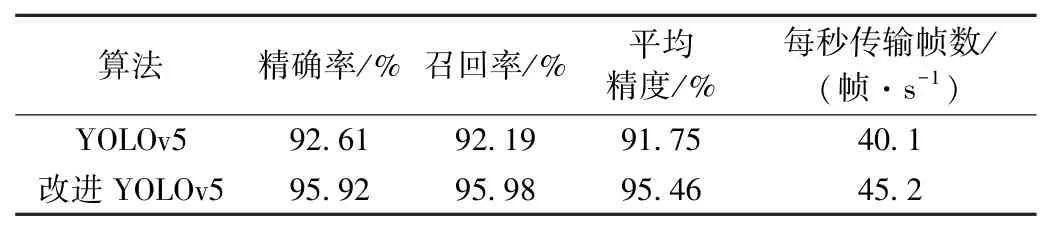
表1 原始YOLOv5 算法与改进YOLOv5 算法比较结果
本文选取部分图像对绝缘子检测结果进行展示,如图2 所示。从图中可以看出,原始的YOLOv5 算法在检测绝缘子的过程中存在遗漏和缺失,而改进以后的YOLOv5 能够准确地检测出所有的目标,说明使用改进以后的网络能够获取更多的信息,证明了本文提出的改进算法对于绝缘子检测的可行性。

图2 原始YOLOv5(左)和改进的YOLOv5(右)算法检测结果对比
5 结语
本文提出基于改进YOLOv5 算法的无人机巡检图像绝缘子检测方法,以经典的目标检测算法YOLOv5 为研究切入点,从以下三方面进行了改进:首先,采用Mosaic-9 进行数据增强,来获取更多的图像;其次,利用FReLU 视觉激活函数来替代ReLU 和PReLU;最后,使用Pixels-IoU 替代GIoU 损失函数来增加对错误框选择的处理机制。通过改进后的YOLOv5 算法进行验证,结果表明改进以后算法检测的准确度得到了极大的提升,实时检测速度也相比原始的YOLOv5 有进步,为绝缘子检测提供了研究思路。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20
太空探索(2016年5期)2016-07-12
电力建设(2015年2期)2015-07-12
时代英语·高三(2014年5期)2014-08-26
电测与仪表(2014年6期)2014-04-04
电气传动自动化(2014年6期)2014-03-20
电视技术(2014年19期)2014-03-11