
基于编队和动态优先级的混合路口通行策略
2024-04-29 19:29:02吴易王庆芝
复杂系统与复杂性科学 2024年1期
关键词:自动驾驶
吴易 王庆芝

摘要: 在包含自动驾驶车辆和人工驾驶车辆的混合路口中,传统通行策略下的车辆平均速度慢,停车等待时间长,通行效率低。为解决这一问题,根据车辆间距建立编队,为不同类型领导者的编队制定不同的通行逻辑与通行优先级计算方法,有效地防止了自动驾驶车辆为形成编队而减速,保证了路口通行的公平性。实验结果表明,随着自动驾驶车辆渗透率的提高,所提策略在交通承载能力、平均速度、平均等待时间、平均油耗等方面均优于对比传统策略。
关键词: 混合路口;自动驾驶;车辆编队;通行策略
中图分类号: U491.4;O231文献标识码: A
A Traffic Strategy for Mixed Intersections Based on Platoon and Dynamic Priority
WU Yi,WANG Qingzhi
(College of Automation,Qingdao University,Qingdao 266071,China)
Abstract:In a mixed intersection composed of autonomous and manual vehicles, the traditional traffic strategy leads to slow traffic, long waiting time, and low efficiency. To solve the problem, in this paper, platoons of vehicles are formed based on the distance between vehicles. The platoons with autonomous and manual vehicles are controlled by different traffic strategies and priorities, which effectively prevents the traffic efficiency reduction of autonomous vehicles and ensures the fairness of traffic at intersections. Simulations show that with the increase of penetration rate, the proposed strategy is superior to the traditional strategies in terms of the average speed, the average waiting time, and the average fuel consumption.
Keywords: mixed intersection; autonomous vehicles; platoon of vehicles; traffic strategy
0 引言
隨着人工智能技术的快速发展,自动驾驶汽车逐渐进入人们的视野,以自动驾驶为基础的车车协同、车路协同将是未来智能交通的发展方向[1]。传统交通信号灯管理策略显然不能充分利用自动驾驶车辆信息交互的优势,因而需要设计适用于自动驾驶和人工驾驶混合交通场景的路口调度策略[2]。目前,该领域已有不少研究成果。例如Yuan等[3]基于元胞自动机模型和跟驰模型在混合路口仿真环境中进行实验,发现自动驾驶车辆的引入能提高交通流的稳定性,且随着自动驾驶车辆比例的增加,交通稳定性将进一步提高。Zhao等[4]考虑了车辆编队,并令自动驾驶车辆引领人工驾驶车辆,以编队作为调度单位通过路口,通行效率明显提升。Feng等[5]通过计算车辆的延误时间和车道的排队长度来确定车道通行优先级。但这些研究并没有考虑到以下问题:1)用交通灯来控制混合路口的全部车辆,可能导致自动驾驶车辆规划的停车位置更为靠前,减速也会提前,不能实现最优控制;2)如果只用自动驾驶车辆作为领导者,会导致为了形成编队而牺牲自动驾驶车辆通行效率。
为解决此类问题,本文改进了编队机制,不再规定只有自动驾驶车辆能成为领导者,给不同领导者的车辆编队赋予不同的调度逻辑,使编队机制更为自由,解决了只有自动驾驶车辆做领导者影响通行效率的问题;另外本文借鉴基于延误时间模型确定通行优先级的思路,设计了一种基于编队和动态优先级的路口通行策略,除延误时间外,还把车辆运动状态和编队信息加入通行优先级的计算之中,使优先级的计算逻辑更适合以编队作为调度单位的场景,最终实现提高通行效率的目的。
1 交通场景描述
考虑同时包含自动驾驶车辆与人工车辆的混合路口交通场景。混合路口的通行控制系统主要由自动驾驶车辆的车载控制模块、路侧信息感知单元、交通灯系统和路侧基站构成,其中路侧信息感知单元负责采集场景内所有车辆的位置、速度等信息,并发送至基站;基站负责接收其他模块发送的信息,经决策处理后,发送运动控制指令给自动驾驶车辆的车载控制模块,发送颜色变更指令给交通灯,由此实现对路口的实时控制。
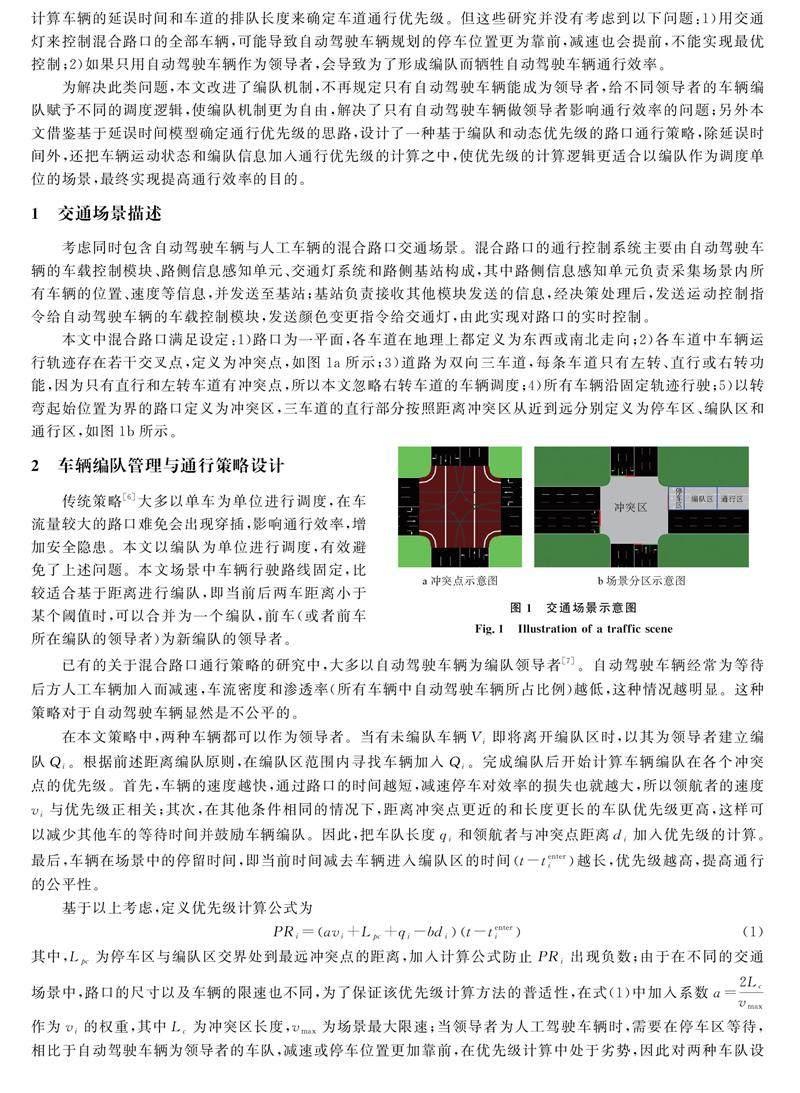
本文中混合路口满足设定:1)路口为一平面,各车道在地理上都定义为东西或南北走向;2)各车道中车辆运行轨迹存在若干交叉点,定义为冲突点,如图1a所示;3)道路为双向三车道,每条车道只有左转、直行或右转功能,因为只有直行和左转车道有冲突点,所以本文忽略右转车道的车辆调度;4)所有车辆沿固定轨迹行驶;5)以转弯起始位置为界的路口定义为冲突区,三车道的直行部分按照距离冲突区从近到远分别定义为停车区、编队区和通行区,如图1b所示。
2 车辆编队管理与通行策略设计
传统策略[6]大多以单车为单位进行调度,在车流量较大的路口难免会出现穿插,影响通行效率,增加安全隐患。本文以编队为单位进行调度,有效避免了上述问题。本文场景中车辆行驶路线固定,比较适合基于距离进行编队,即当前后两车距离小于某个阈值时,可以合并为一个编队,前车(或者前车所在编队的领导者)为新编队的领导者。
已有的关于混合路口通行策略的研究中,大多以自动驾驶车辆为编队领导者[7]。自动驾驶车辆经常为等待后方人工车辆加入而减速,车流密度和渗透率(所有车辆中自动驾驶车辆所占比例)越低,这种情况越明显。这种策略对于自动驾驶车辆显然是不公平的。
在本文策略中,两种车辆都可以作为领导者。当有未编队车辆Vi即将离开编队区时,以其为领导者建立编队Qi。根据前述距离编队原则,在编队区范围内寻找车辆加入Qi。完成编队后开始计算车辆编队在各个冲突点的优先级。首先,车辆的速度越快,通过路口的时间越短,减速停车对效率的损失也就越大,所以领航者的速度vi与优先级正相关;其次,在其他条件相同的情况下,距离冲突点更近的和长度更长的车队优先级更高,这样可以减少其他车的等待时间并鼓励车辆编队。因此,把车队长度qi和领航者与冲突点距离di加入优先级的计算。最后,车辆在场景中的停留时间,即当前时间减去车辆进入编队区的时间t-tenteri越长,优先级越高,提高通行的公平性。
基于以上考虑,定义优先级计算公式為
其中,Lpc为停车区与编队区交界处到最远冲突点的距离,加入计算公式防止PRi出现负数;由于在不同的交通场景中,路口的尺寸以及车辆的限速也不同,为了保证该优先级计算方法的普适性,在式(1)中加入系数a=2Lcvmax作为vi的权重,其中Lc为冲突区长度,vmax为场景最大限速;当领导者为人工驾驶车辆时,需要在停车区等待,相比于自动驾驶车辆为领导者的车队,减速或停车位置更加靠前,在优先级计算中处于劣势,因此对两种车队设定不同的系数b以保证公平性:当领航者为自动驾驶车辆时,b=1;当领航者为人工驾驶车辆时,b=diLs+di,Ls为停车区长度,di为停车区与冲突点的距离。这样的优先级计算方式,既延续了经典的基于车辆延误时间的思路,也融入了对编队长度、停车造成的损失等方面的考量,更加适合复杂交通场景。
具体通行策略:1)若领导者为自动驾驶车辆:忽略交通灯,由算法控制其运动状态以实现最优的通行策略。每个周期动态更新优先级,直至其通过冲突区;2)若领导者为人工驾驶车辆且冲突车道无优先级更高的车队:交通灯为绿灯,每个周期动态更新优先级,直至其通过冲突区;3)若领导者为人工驾驶车辆且冲突车道有优先级更高的车队:交通灯为黄灯,提醒车辆注意减速。前面的车队最后一辆车驶离停车区时切换为红灯,动态更新当前车队优先级,直至车道变为绿灯后车队通过冲突区。
3 自动驾驶领导者编队的运动控制
当车队的领导者为人工车辆时,由驾驶员根据交通信号灯做出相应的驾驶行为;当领导者为自动驾驶车辆时,可以进一步对其驾驶行为进行精确的控制。本节将介绍如何在给定约束条件下,计算最优的车辆控制策略。
本策略中选择模型预测控制算法[8],通过解优化问题来控制自动驾驶车辆。算法可以看作上下两层,上层算法在一维运动中做规划,得到车辆在预测时域内沿轨迹的参考位移、速度和加速度。上层算法的结果映射在二维平面后,输入到下层的模型预测控制算法中,实现对车辆运动规划结果的跟踪。
3.1 沿轨迹的一维运动规划
设离散时间系统的周期为T,规划时域为Np。从当前时刻开始,车辆Vi在规划时域内的一维位置、速度、加速度为sik,vik,aik,k=0,1,…,Np-1,其中位置和速度的初始值si0=s*i,vi0=vi分别为车辆的参考一维位置和实际速度,其中参考一维位置为路径上距当前车辆最近的点在路径中的位置。将一维运动控制写成如下二次规划问题:
目标函数分为两部分,第1部分表示在Np步内使车辆行驶最远的距离,第2部分是为了避免数值较大的加速度,增加车辆乘坐舒适度的同时也能降低油耗。
约束条件中,式(3)(4)为一维的运动学方程;式(5)(6)初始状态约束;式(7)~(10)为车辆运动时的速度和加速度边界限制;式(11)表示不同车道的编队在冲突点的避碰。当优先级高的车队最后一辆车通过冲突点时,优先级低的车应未到冲突点且与冲突点距离大于二分之一车长。CQi为尚未通过与车队Qi的冲突点,且优先级高于车队Qi的所有车队Qj的集合,di,j为车队Qi和Qj的冲突点在车队Qi轨迹中的位置,L为车身长度,ki,jj,Nj为车队Qj中的最后一辆(即第Nj辆车)通过两车队冲突点的时间。第10式表示同一车道前后两车的跟车距离不小于Δs。Pri为与车辆Vi在同一车道且优先级高于Vi的车辆合集,Δs为同一车道前后两车的安全距离。
求解此二次规划问题可以得到车辆Vi在规划时域Np步内沿轨迹的参考位移、速度和加速度si,rk,vi,rk,ai,rk,k=0,1,…,Np-1。将一维运动规划结果映射到二维平面中,可以得到对应的二维平面内车辆的参考运动状态,并以此为跟踪目标,通过MPC求解出车辆实际的控制信息。
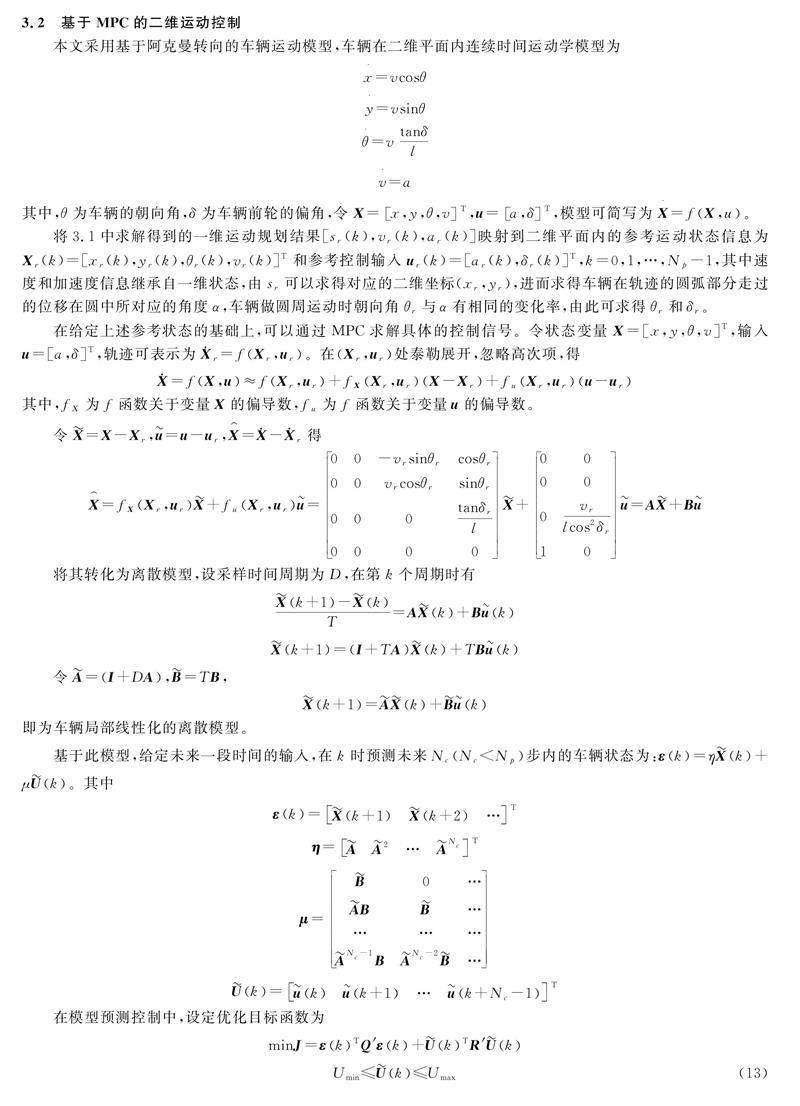
3.2 基于MPC的二维运动控制
本文采用基于阿克曼转向的车辆运动模型,车辆在二维平面内连续时间运动学模型为
经二次规划求解器对上式求解后,得到轨迹跟踪的最优控制序列u(k)=ak,δ(k)T,k=0,1,2,…,Np-1。此时车辆执行该序列的第一个指令,即u(0)=a0,δ(0)T,车辆的位置和状态发生变化后,下一时刻重新求解优化问题,得到新的控制量,循环进行,直到车辆驶离交通路口。
本文所提策略,即基于编队和动态优先级的混合路口通行策略,完整算法总结:
4 仿真实验与结果分析
4.1 实验方案设计
本文实验使用SUMO[9]作为仿真平台,在CUP型号为R7-5750g,内存为16g的电脑上运行。仿真的离散时间周期T=0.1 s,规划时域Np=20个周期,控制时域Nc=5个周期,权重Q=5In,R=2In。实验中参数如表1所示。
設置从图像上方开始顺时针4个方向的来车数量比例为1∶2∶2∶3,以固定时间间隔进入场景。车流量由两部分构成:1)自动驾驶车辆,调用traci接口,用章节3中的模型预测方法进行控制;2)人工驾驶车辆,采用软件内的SUMO Krauss模型进行控制,并设置失误率参数,从而模拟真人驾驶员的驾驶逻辑。为了增加随机性,车辆进入场景的初始速度为不超过最大速度1/5的随机值。车辆的油耗统一采用SUMO中的PC_G_EU4标准。最终计入统计结果的数据为5次实验的平均值。
对比算法中选择传统的交通灯策略[10]和基于车辆延误模型的交通灯策略[1112]。其中传统的交通灯策略为固定时间相位进行切换。由于两个直线方向的最大车流密度比例为2∶3,所以两方向交通灯时间设定为同样的比例,实验中分别设定为40 s和60 s,其中直行和左转各占一半时间。基于车辆延误模型的交通灯策略是一种自适应相位的策略,根据道路的通行能力建立延误模型,以场景中现有的车辆数来估算总延误时间,再根据延误时间来优化交通灯的配时方案,以此提高总体的通行效率。
4.2 实验结果与分析
选择传统的交通灯策略和基于车辆延误模型的交通灯策略作对比,两种对比策略几乎不受渗透率影响。在场景中测试两种对比策略和不同渗透率下本文策略在不同交通流压力下的平均速度、平均等待时间和平均油耗。实验结果如图2所示,其中横坐标为场景图顶部方向单车道每小时总车流量,纵坐标为相应指标。
基于实验可得:1)传统交通灯的通行策略,无论在交通流承载能力、通行效率还是能源消耗方面,都和其他策略有明显差距;2)基于车辆延误模型的策略,在渗透率为0.3和0.5时,低车流密度下的一些表现与本文策略相当或者更好。当渗透率达到0.7,才会在各类场景中的表现都明显落后于本文策略;3)自动驾驶汽车渗透率的增加,将提升通行效率。当渗透率为0.3,单车道车辆达到每小时220辆,路口会出现堵塞现象,而同样密度的车流在渗透率为0.5和0.7时可以顺畅通行。车辆平均油耗方面,同样也是高渗透率的场景更低。
上述实验结果出现的原因:相比于人工驾驶车辆,自动驾驶车辆在场景中停车的概率会低很多,也很少会有大幅的加减速,所以本策略在高渗透率的场景中表现更好;相比于传统策略,本策略优势体现在自由编队方法和与编队匹配的优先级机制,使各个车辆能够以平稳的速度通过路口;合理的优先级机制,则保证了路口各个方向车辆调度的公平性,使各条道路减少排队拥堵。
5 总结与展望
为了提高混合交通路口的通行效率,同时减少能源消耗,提出了一种基于编队和动态优先级的通行策略,根据领航车辆速度、车辆停留时间和编队长度等因素制定优先级通行机制,在一定程度上改善了传统策略以及其他混合路口策略普适性弱、编队机制破坏公平性等问题。SUMO仿真表明,本策略在渗透率或车辆密度提高到一定程度时,交通承载能力、通行效率和能源消耗方面均优于传统交通灯策略和基于车辆延误的通行策略。
本文策略仍存在一定局限性,例如没有考虑特殊车辆、行人等其他交通对象;自动驾驶车辆的低渗透率会导致策略缺乏优势;跟随者可以采用其他跟驰算法代替MPC以节省算力等。未来将在上述方面继续开展工作。
参考文献:
[1]SU Z, HUI Y, YANG Q. The next generation vehicular networks:a content-centric framework[J]. IEEE Wireless Communications, 2017, 24(1): 60-66.
[2]刘卓, 卢凯明, 何佳,等.面向人机混驾环境的交叉口车辆通行控制策略[J]. 北京工业大学学报, 2022, 48(6): 608-621.
LIU Z, LU K M, HE J, et al. Control strategy for the mixed traffic flow of CAV and HV in intersection[J]. Journal of Beijing University of Technology, 2022, 48(6): 608-621.
[3]YUAN Y M, JIANG R, HU M B, et al. Traffic flow characteristics in a mixed traffic system consisting of ACC vehicles and manual vehicles: a hybrid modelling approach[J].Physica A: Statistical Mechanics and Its Applications, 2009, 388(12): 2483-2491.
[4]ZHAO W, NGODUY D, SHEPHERD S, et al. A platoon based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalised intersection[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 802-821.
[5]FENG Y, HEAD K L,KHOSHMAGHAM S, et al. A real-time adaptive signal control in a connected vehicle environment[J]. Transportation Research Part C: Emerging Technologies, 2015, 55: 460-473.
[6]栗红强. 城市交通控制信号配时参数优化方法研究[D]. 长春: 吉林大学, 2004.
LI H Q. Study on the optimization methods of signal timing parameters of urban traffic control[D]. Changchun: Jilin Univercity, 2004.
[7]陈超义. 混合交通环境下交叉路口信号灯—车辆协同控制方法[D]. 北京: 清华大学, 2019.
CHEN C Y. Cooperativecontrol of traffic signal and connected vehicles at intersections in the mixed traffic environment[D]. Beijing: Tsinghua University, 2019.
[8]BORHAN H, VAHIDI A, PHILLIPS A M, et al. MPC-based energy management of a power-split hybrid electric vehicle[J]. IEEE Transactions on Control Systems Technology, 2011, 20(3): 593-603.
[9]CODEC L, FRANK R, FAYE S, et al. Luxembourg sumo traffic (lust) scenario: traffic demand evaluation[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(2): 52-63.
[10] GB 14886-2016, 道路交通信號灯设置与安装规范[S].
GB 14886-2016, Specifications for road traffic signal setting and installation[S].
[11] Olszewski P. Overall delay, stopped delay, and stops at signalized intersections[J]. Journal of Transportation Engineering, 1993, 119(6): 835-852.
[12] 周键. 基于多传感器技术的实验室智能安全监测系统研究[J]. 智库时代,2021(41):118-120.
ZHOU J. Research on laboratory intelligent safety monitoring system based on multi-sensor technology [J]. Think Tank Era, 2021(41):118-120.
(责任编辑 李 进)
收稿日期: 20221110;修回日期: 20230106
基金项目: 国家自然科学基金青年基金(61903212)
第一作者: 吴易(1993),男,河北唐山人,硕士研究生,主要研究方向为智能交通。
通信作者: 王庆芝(1988),女,山东济宁人,博士,副教授,主要研究方向为间歇控制、多智能体、切换系统、T-S模糊系统。
猜你喜欢
南风窗(2017年23期)2017-11-23 11:15:33
科技创新导报(2017年26期)2017-11-08 08:42:58
科学与财富(2017年28期)2017-10-14 14:15:17
中国计算机报(2017年22期)2017-09-16 22:10:44
山东工业技术(2017年15期)2017-09-05 06:02:15
中国科技术语(2017年3期)2017-07-10 10:59:13
汽车周刊(2017年5期)2017-06-06 14:02:49
中国科技纵横(2017年4期)2017-05-16 08:29:17
中国科技博览(2017年5期)2017-04-25 16:37:32
移动通信(2016年24期)2017-03-04 22:12:26
