结合色彩补偿与双背景光融合的水下图像复原
2024-04-27 13:29:06查子月
光学精密工程 2024年7期
林 森,查子月
(沈阳理工大学 自动化与电气工程学院,辽宁 沈阳 110159)
1 引言
随着人类对海洋资源的重视和开发,水下图像作为海洋信息的重要表达形式,在水下机器人、海洋工程及生态监测等领域发挥着关键作用[1]。然而,受水中介质的散射吸收以及光的衰减特性影响,水下图像普遍存在颜色失真、细节模糊、对比度低等退化问题[2-4]。因此,图像质量的提高及可视化清晰效果的实现既具现实意义又具挑战性。
近年来,针对图像退化问题提出的水下图像清晰化方法大致可分为三类:基于非物理模型的图像增强、基于物理模型的图像复原和深度学习[5-6]。直方图均衡化[7]、灰度世界[8]、小波变换[9]和基于融合等图像增强方法通过直接或间接调整图像的像素值[10],实现视觉效果提升。Ancuti等[11]以相关权重融合退化图像的颜色补偿和白平衡两种版本,增强色彩及边缘信息。Zhang等[12]提出最小颜色损失和局部自适应对比度增强算法(Minimal Color Loss and Locally Adaptive Contrast Enhancement,MLLE),校正色偏的同时提高图像对比度。此类方法在图像对比度和亮度增强方面取得了良好的效果,但未考虑水下光学成像特性,易引入颜色偏差和伪影,导致图像存在过饱和或欠饱和区域。
图像复原方法根据水下图像退化过程建立成像模型,利用先验知识求解参数,反演获得清晰的图像[13]。Drews 等[14]通过验证水下图像蓝绿色通道包含主要的视觉信息及He 等[15]所提的暗通道先验算法(Dark Channel Prior,DCP)应用于蓝绿色通道有效这两种假设,提出水下暗通道先验算法(Underwater Dark Channel Prior,UDCP)。Peng 等[16]提出泛化型暗通道先验算法(General Dark Channel Prior,GDCP),分析水下图像深度相关的颜色变化估计环境光,利用场景环境光差计算透射率,结合自适应色彩校正成像模型复原图像。Wang 等[17]提出双透射率水下成像模型结合红色暗通道先验算法(Double Transmission of Red Dark Channel Prior,DRDCP),估计后向散射分量透射率及背景光,利用无退化像素点求得直接分量的透射率。此类方法基于传统的简化大气散射模型分析及改进现有先验假设信息,具备一定的图像改善能力,但应用于复杂的水下场景中,稳定性较差,影响恢复效果。
深度学习是一种基于数据集训练的方法,通过学习真实图像和退化图像之间的非线性关系,实现对退化图像的复原和增强。Islam 等[18]提出快速水下增强网络(Fast Underwater Image Enhancement Generative Adversarial Networks,FUnIE-GAN),通过在生成网络中加入残差连接实现图像细节清晰化。Naik 等[19]提出浅层神经网络结构,简化网络参数,恢复图像的同时减少对硬件设备资源占用。Chen 等[20]提出内容与风格分离的水下图像自适应增强框架(Underwater Image Enhancement via Content and Style Separation,Uiess),将编码特征分离为内容和潜在风格,区分不同领域潜在风格并进行领域自适应和图像增强。此类方法虽具有较好的清晰化效果,但高质量训练数据集的不足限制了其有效性和稳定性。
为了解决复杂成像过程中颜色失真、细节模糊等多种问题,本文提出一种结合色彩补偿与双背景光融合的水下图像复原方法,基于Retinex 理论与白平衡算法将色彩补偿分量引入成像模型中,补偿水下衰减过快的颜色通道,获得接近雾天退化的图像;根据水体对光的吸收特性及背景光的高亮-平坦特点,采用低通-UDCP 算法及四叉树分级搜索方法分别确定两个候选背景光,进行加权融合以精确求解全局背景光,避免白色高亮物体的干扰;分析水体背景颜色与散射系数的关系,采用引导滤波及高斯高通滤波优化透射率,去除后向散射光,增强纹理细节信息。
2 水下成像模型及相关原理
光在大气和水中的传播过程具有一定相似性,因此,水下图像清晰化算法大多采用简化的大气散射模型[21]。该模型主要由两个部分组成:经过介质吸收衰减后被成像设备接收的物体反射光,即直接衰减部分;以及未经物体反射,被介质散射后传入成像设备的环境光,即后向散射部分。其表达式为:
式中:c∈{R,G,B}为三个颜色通道中的任一通道,x为像素点坐标,I为原始退化图像,J为恢复后的清晰图像,B为水体背景光,t为介质透射率。水中光衰减遵循Lambert-Beer 定律,与传输距离d(x)和衰减系数βc呈指数关系,表达式为:
基于DCP 算法进行水下图像复原时,认为无雾图像大部分像素点在其邻域内至少存在一个颜色通道具有极低的像素值,将它近似为零,其表达式为:
对式(1)两边进行最小值滤波并同除以Bc,表达式为:
将式(3)带入式(4)得到透射率tc(x)的表达式为:
根据式(5)及所估计的背景光,逆求解式(1)可得复原图像,表达式为:
式中引入临界值t0,避免分母为零而导致公式无解。
3 结合色彩补偿与双背景光融合的水下图像复原
水中传播的可见光在不同波长下的衰减率不同,传统模型中的吸收衰减部分未考虑波长相关分量,会影响水下图像复原算法的稳定性。为了克服模型的局限性,现有算法通常会进行颜色校正处理,可能导致图像出现颜色偏差或伪影。因此,本文根据水下光学成像特性,考虑水体背景颜色的影响,在成像模型中引入色彩补偿分量达到颜色校正效果;采用两种方法求解并融合背景光,避免高亮白色物体的影响;不依赖水体环境系数,根据水体背景颜色与散射系数的关系自适应求解透射率。
本文算法流程如图1 所示,首先,采用四叉树分级搜索算法估计水体背景颜色,并利用白平衡算法求取色彩补偿分量,校正各颜色通道,使其接近雾天退化图像;其次,结合低通滤波及UDCP 先验估计背景光一,基于四叉树分级搜索估计背景光二,线性加权融合两个背景光得到最终背景光;然后基于DCP 获取初始透射图,根据水体背景颜色与散射系数的关系优化,使用引导滤波及高斯高通滤波增强优化各通道的透射率;最后得到复原图像。
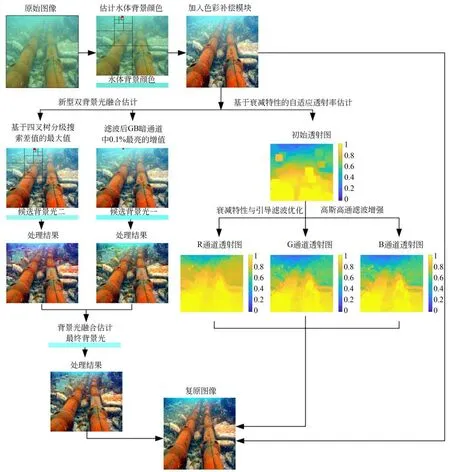
图1 结合色彩补偿与双背景光融合的水下复原算法流程Fig.1 Flow chart of underwater restoration algorithm combining color compensation and dual background light fusion
3.1 基于色彩补偿分量的改进水下成像模型
水下图像通常受到水体和悬浮颗粒对光的吸收和散射的影响,产生色偏和雾化现象,将它类比为被有色光源照射及浓雾覆盖的大气图像,其中有色光源相当于水体背景颜色。在不考虑图像雾化现象的前提下,分析光的衰减作用,引入色彩补偿分量解决色偏现象。
根据Retinex 模型[22],水下图像可以表示为物体反射分量与照射分量的乘积,即:
式中:Lc为表面照射光,即水体背景颜色,Rc(x)为物体反射属性。
根据颜色恒常性理论[23],物体真实颜色取决于反射属性,而与表面照射光强度无关。为准确获取物体的真实颜色,成像过程中需降低照射分量的影响;而由于红色光在水中衰减过快,水体背景颜色的红色分量过低。为解决此问题,基于灰度世界的白平衡假设,未发生退化的彩色图像在R,G,B 三颜色通道具有相同的灰度平均值,故各颜色通道补偿值与亮暗两通道背景颜色值之差成正比,色彩补偿分量表达式为:
此外,采用最小-最大归一化将结果图像亮度映射在显示区间[0,1]或[0,255]中,具有颜色校正效果。考虑后向散射引起的模糊,将式(10)中色彩补偿后的图像Rc(x)作为式(1)中传统Jaffe-McGlamery 模型[24]的输入Ic(x),进一步解决水下图像的雾化问题。引入色彩补偿分量后,改进的水下成像模型表达式为:
根据水体背景颜色区域色偏最严重且局部亮度变化缓慢的特性,可知该区域色偏最大的颜色通道均值较大且三通道像素的标准差较小。基于四叉树分级搜索方法[25],搜索均值较大且标准差较小的图像区域,将目标区域内与纯白像素点欧氏距离最小的点的像素值作为水体背景颜色值,保证估计的背景颜色尽可能明亮。具体表达式为:
式中:Vn(n=1,2,3,4)为图像等分的4 个矩形区域,N为各区域像素点数量,(x)为n区域c通道x处的像素值为n区域c通道的平均像素值。如图2 所示,利用四叉树分级求解水体背景颜色,引入相应的色彩补偿分量。相较于UDCP方法,图像清晰度明显提高且水体背景颜色更为自然。
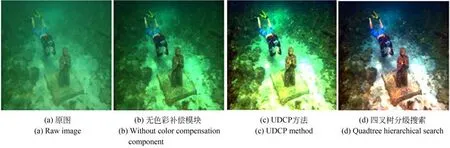
图2 色彩补偿前后及不同算法估计背景颜色的效果对比Fig.2 Comparison of effects of estimating background color before and after color compensation using different algorithms
3.2 双背景光融合估计
背景光估计的准确性在水下图像复原中起着关键作用,直接决定了亮度和色调,对提升图像质量和视觉效果至关重要。常见的估计方法有:基于DCP 算法选取图像中最亮的0.1%所在位置的像素点均值;采用四叉树分级搜索;基于最大强度先验选取红色暗通道与蓝绿色最大暗通道差值最大处对应的像素值。基于现有方法,根据背景光亮度衰减及颜色偏移特性提出两种改进的估计方案,并采用加权融合方法准确估计背景光。
为降低白色物体的影响,先通过低通滤波获取水体背景光相关的低频分量;再基于UDCP 选取图像最亮的某一百分比所在位置的像素均值,不同百分比的像素点计算出的背景光不同。较小的百分比更关注于最明亮的区域,但可能会对整体背景光的估计产生一定的偏差;而较大的百分比更全面地考虑图像中较亮的区域,但可能会将一些较亮的物体或区域纳入背景光的估计范围,导致估计值偏高。根据实验,取前0.1%的像素点计算背景光更精确,并避免光在水中的吸收衰减(红色通道衰减最快)导致图像的过度补偿。第一种候选背景光表达式为:
式中:G[]为高斯低通滤波器,利用卷积核计算中心像素及其邻域像素的平均值,达到平滑滤波的目的,b0.1%为满足要求的像素集。为防止获取的暗通道图出现块效应,采用引导滤波进一步细化。
基于背景光的平坦性,采用四叉树分级搜索估计背景光,将图像等分为4 个矩形区域,选择像素均值与标准差最大的区域作为候选区域;再对候选区域进行同样的分割和判断,直至候选区域的差值满足预定阈值。第二种候选背景光表达式为:
式中bf为满足阈值条件的候选区域内的像素集。
基于低通滤波-UDCP 先验估计方法,虽考虑到光的衰减特性,但存在人造光源时导致估计错误;基于四叉树分级搜索方法虽考虑到背景光的平坦性,但未考虑光的衰减,可能导致估计不准确。因此,设计类似Sigmoid 的融合函数S(σ,δ)准确求解背景光,其表达式为:
式中:σ为复原前图像中强度高于0.5 的像素占比。δ为偏移量,当偏移量过大时,估计结果偏向于较大的背景光值,可能无法准确地估计低背景光的情况;当偏移量过小时,估计结果偏向于中间值,而无法捕捉到较大或较小背景光值的变化。m为斜率,当斜率过大时,估计时对噪声和细微变化过于敏感,估计结果不稳定;当斜率过小时,背景光估计的响应较为平缓,无法准确地跟随背景光的变化。根据文献[26],以及进行实验验证与调节,参数分别设置为δ=0.2,m=18。当σ趋于1,背景光较明亮,选取较大候选背景光为最终背景光,即有:
图3 展示了各背景光的估计结果和基于估计值的处理结果。图中,B1 为第一种候选背景光,B2 为第二种候选背景光,B3 为文献[26]中的融合背景光,B 为本文算法的融合背景光。从图中可知,B1 和B2 估计方法会导致图像出现不同程度的色偏,而B 估计方法使用的融合函数中和了两种色偏,细节更加清晰;B3 估计方法虽也运用了融合理念,但所选的背景光估计方法未进行改进,会受到浅色场景或人造光源的影响,导致估计错误,产生了更大程度的色偏。因此,本文估计的融合背景光更贴近真实水下环境,处理结果也最优。

图3 两种候选背景光及融合背景光Fig.3 Two candidate background lights and fused background lights
3.3 优化介质透射率
UDCP 先验假设水下图像大部分视觉信息存在于蓝绿色通道,并结合水下成像模型估计相应的介质透射率。然而,不同波长的可见光在水下传播时吸收和散射衰减程度不同,尽管进行了色彩补偿,图像仍受到水下光学衰减的影响,即红色可见光衰减迅速,蓝色光衰减缓慢。因此,基于UDCP 算法获取初始透射率t',定义为水体背景颜色的蓝绿色较大通道透射率(以t'=tB为例),再根据Lambert-Beer 定律求解另两通道的透射率,表达式为:
式中:μR=βR/βB和μG=βG/βB为相对衰减率,分别表示对应通道的散射系数的比值。
波长越长的可见光在水中衰减越快,散射系数越小,对应的水体背景颜色分量值也越小,因此,光的衰减特性及各颜色分量散射系数的内在联系可以通过水体背景颜色体现。水体背景颜色与散射系数成正比,即:
通过式(20)计算两个相对衰减率,得到:
此外,先后使用引导滤波和高通滤波优化透射率,达到平滑和增强细节的双重效果。引导滤波可以平滑透射率图像,减少噪声的影响;高通滤波可以突出透射率变化的细节,提高透射率优化的准确性和可靠性。透射率优化的表达式为:
式中γ为控制细节分量放大程度的增强参数。如图4 所示,透射率优化后恢复更多的颜色信息,细节信息更为丰富。
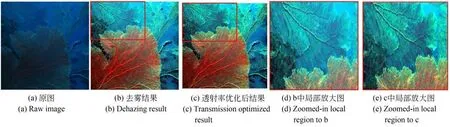
图4 透射率优化前后的效果对比Fig.4 Comparison of processed images with transmission enhancement before and after optimization
4 实验结果与分析
将本文算法与多种算法在不同数据集上进行定性和定量比较,以验证其有效性。对比算法包括复原算法UDCP[14],GDCP[16]和DRDCP[17];增强算法Fusion[11],MLLE[12];深度学习算法FUnIE-GAN[18],Shallow-uwnet[19]和Uiess[20]。数据集为:包含蓝、绿、蓝绿色3 种色偏各100 张图像的UCCS 数据集[27];包含A,B,C,D 和E 5 种可见度各726 张图像的UIQS[27]数据集;包含950 张不同水下场景图像的UIEB[28]数据集;包含7 张由不同相机拍摄的水下色卡图像的Color-Check7 数据集[29]。
4.1 主观评价
在Color-Check7 数据集上,使用不同算法对7 张色卡图像进行处理,以4 张色卡为例进行展示。如图5 所示,从上至下分别是以Panasonic_TS1,Cannon_D10,Olympus_T8000 和FujiFilm_Z33 拍摄的水下色卡图及各算法的处理结果。原图亮度低、对比度低且存在色偏现象;GDCP 算法虽改善色偏且增强亮度,但亮度增强过度,视觉效果不佳,如TS1 色卡;Fusion 和MLLE 算法改善色偏,但Fusion 亮度有待提高,MLLE 饱和度欠佳,色卡颜色恢复不自然,如D10,T8000 和Z33 色卡;其他对比算法未解决图像色偏现象,甚至加剧了颜色失真,如DRDCP,FUnIE-GAN 等算法;所提算法恢复的图像颜色真实自然,具有较好的视觉效果。
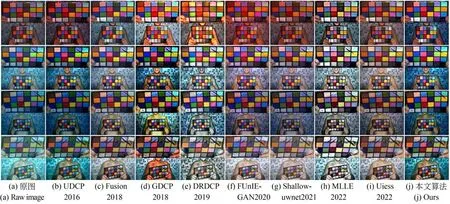
图5 颜色恢复实验结果Fig.5 Results of color recovery experiment
在UCCS 数据集上比较不同算法的颜色校正能力,图6 从上至下分别展示了蓝色、蓝绿色和绿色色偏各一张图像及其结果图。对于蓝色水下图像,UDCP 和GDCP 未能校正蓝色色偏;DRDCP 校正蓝色偏差效果欠佳;其他对比算法都消除了蓝色偏差,但Fusion 和Shallow-uwnet结果图的对比度有待提高;FUnIE-GAN 和Uiess结果图引入了淡黄色;MLLE 结果图颜色不够真实自然。对于蓝绿色水下图像,UDCP 无法校正蓝绿色色偏;GDCP 和Uiess 结果图引入了红色偏差;FUnIE-GAN 和Shallow-uwnet 结果图引入了淡黄色偏差且对比度低;DRDCP,Fusion 和MLLE 结果图偏灰调,颜色恢复不够自然。对于绿色水下图像,UDCP,GDCP 和DRDCP 未能校正绿色偏差;Fusion 和MLLE 结果图像偏灰色;FUnIE-GAN 和Shallow-uwnet 结果图引入了淡黄色偏差;Uiess 引入了红色偏差。相比之下,所提方法在颜色校正、对比度和细节增强方面均优于对比算法,有效地提高可见性,颜色恢复更为自然。

图6 UCCS 数据集上的视觉比较Fig.6 Visual comparisons on UCCS dataset
在UIQS 数据集上比较不同算法对图像可见性的改进效果,图7 从上至下分别展示了A,B 和E 级别各一张图像及其结果。UDCP 一定程度上提高了对比度,但B 和E 等级的图像颜色校正效果不理想;GDCP 能够有效消除光散射引起的影响,但对颜色偏差处理效果不佳,特别是在水呈绿色时,存在亮度增强过度现象;DRDCP 显著提高了图像的亮度和对比度,但引入了少量紫色色偏。Fusion 能够提高亮度和对比度,但对结构细节的增强效果欠佳;MLLE 显著提高了对比度、亮度和饱和度,但颜色恢复不自然,整体呈灰色。相比之下,所提方法能够有效消除颜色偏差,突出结构细节,并在不过度增强或过饱和的情况下提高可见性。

图7 UIQS 数据集上的视觉比较Fig.7 Visual comparisons on UIQS dataset
为了进一步评估不同方法的有效性和稳定性,随机选择UIEB 数据集中几个不同水下场景的图像。如图8 所示,对于模糊的水下图像,UDCP 和GDCP 加剧了色偏,且结果图像整体偏暗或偏亮;FUnIE-GAN,Shallow-uwnet 和Uiess 额外引入了色偏;DRDCP 和Fusion 在增强低能见度水下图像的可见度方面不能令人满意,无法完全消除雾状外观。MLLE 能够有效增强图像的可见度,但会引入局部黑暗,且饱和度有待增强。相比之下,所提方法能够去除色偏,在没有明显的过度增强、欠增强和局部黑暗的情况下有效提高可见性。

图8 UIEB 数据集上的视觉比较Fig.8 Visual comparisons on UIEB dataset
4.2 客观评价
在UCCS,UIQS 和UIEB 数据集上,使用水下彩色图像质量评价[30](Underwater Color Image Quality Evaluation,UCIQE)、频域无参考的水下图像质量评估[31](A reference-free underwater image quality assessment metric in frequency domain,FDUM)、信息熵[32](Information Entropy,IE)、自然图像质量评估[33](Natural Image Quality Evaluator,NIQE)和色彩对比度雾密度指数[34](Colorfulness Contrast Fog Density Index,CCF)5 个无参考指标进行评价。其中,UCIQE综合评估图像色调、饱和度和清晰度,值越大效果越好;FDUM 综合评估色彩、对比度和锐度,值越大图像质量越高;IE 衡量图像边缘、纹理等细节信息,值越大去雾效果越好;NIQE 反映图像自然程度,值越小视觉效果越好;CCF 综合评估图像的色度、对比度和雾密度,值越大效果越好。由于UIEB 数据集存在相对应的增强参考对比图,额外使用结构相似性[35](Structural Similarity Index Metric,SSIM)和峰值信噪比[36](Peak Signal to Noise Ration,PSNR)两个全参考指标进行评价。SSIM 综合评估图像的相似程度,值越大图像越相似;PSNR 衡量原始与结果图像之间的信号与噪声比例,值越大图像质量越好。在Color-Check7 数据集上,使用CIEDE2000 标准[37]进行评估,裁剪结果中,各色块与标准色块的色差越小颜色恢复越好。
为了客观评估算法的颜色校正能力,在Color-Check7 数据集上使用CIEDE2000 指标对各算法进行评估,结果如表1 所示,最优值加粗。所提算法处理D10,Z33,T8000 和TS1 图像时指标最优,且在整个数据集上的平均指标也达到了最佳水平。结果表明,对于不同相机拍摄的水下图像,所提算法均可最大程度地还原真实颜色。
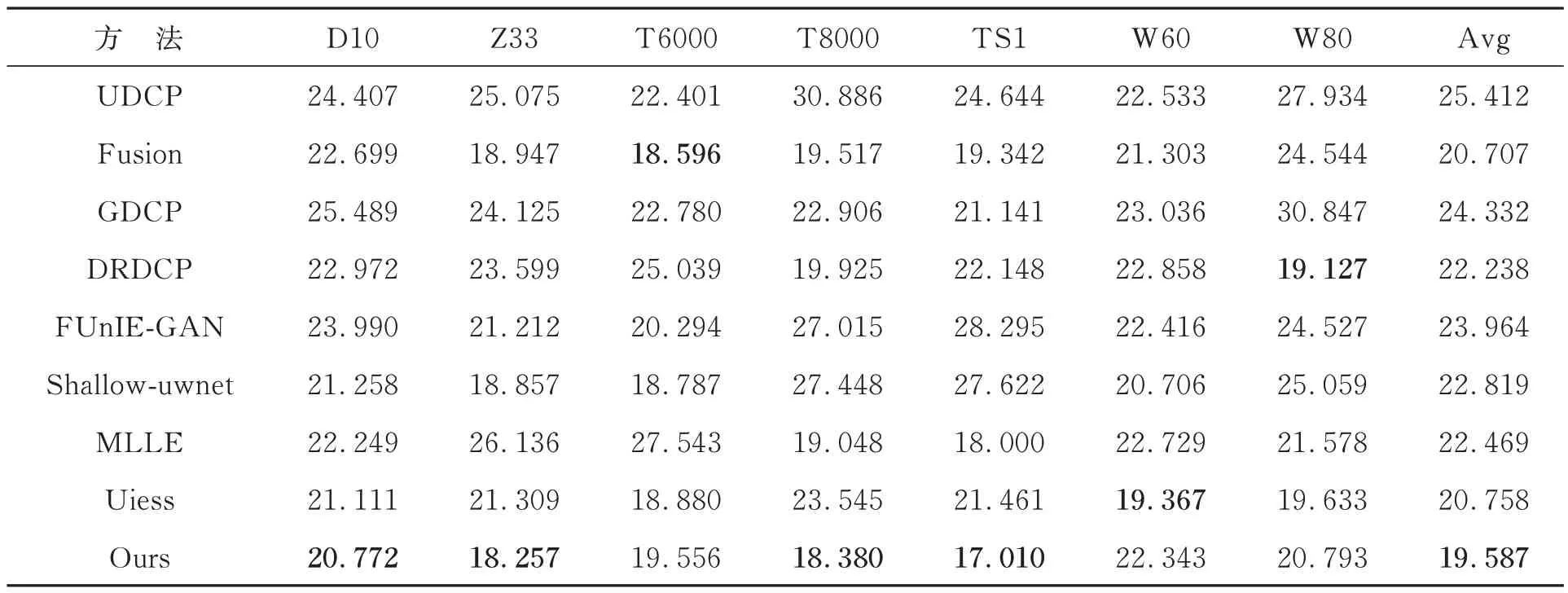
表1 不同算法在Color-Check7 数据集上的CIEDE2000 评测值对比Tab.1 CIEDE2000 comparison of different methods on Color-Check7 dataset
表2 展示了在UCCS 和UIQS 数据集上使用不同方法计算的UCIQE,FDUM,IE,NIQE 和CCF 指标结果。由表可知,所提算法相较对比算法,在UCCS 数据集中UCIQE,FDUM 和CCF指标最优,其余指标次优;在UIQS 数据集中UCIQE 和FDUM 指标最优,其余指标次优。综合定性和定量评估结果可知,所提算法具有优越的颜色校正能力,对不同质量级别的水下图像处理效果更优。

表2 不同算法在UCCS 和UIQS 数据集上的客观指标对比Tab.2 Quantitative comparison of different methods on UCCS and UIQS datasets
根据表3 中UIEB 数据集的定量比较可知,所提算法的UCIQE,NIQE,SSIM 和PSNR 指标最优,其余指标次优,能够显著增强对比度、亮度和纹理细节,复原结果总体上呈现高可见度和自然颜色。3 个数据集的无参考指标均值两个最优,3 个次优,充分体现出所提算法在客观指标上的优势。

表3 不同算法在UIEB 及三个数据集上的客观指标对比Tab.3 Quantitative comparison of different methods on UIEB and three datasets
4.3 细节增强对比
精细的结构细节对于高质量的水下图像尤为重要。如图9 所示,与对比算法的细节增强效果对比,从全局来看,所提算法在提升图像色彩和对比度方面表现出显著优势;从局部来看,在增强结构细节方面表现出色,如方框所示的放大区域。

图9 细节增强的视觉比较Fig.9 Visual comparisons of detail enhancement
4.4 运行时间对比
为验证算法效率,在Windows10 操作系统,硬件环境为Intel i5-12400CPU、16GB 内存以及12GB 显存的GTX3060 显卡,使用MATLAB R2018b 和PyCharm 软件,随机选取UIEB 数据集中100 张256×256 的图像进行时间测试与对比,实验结果如表4 所示。由于GPU 加速,基于深度学习的方法在速度方面具有优势,尽管Shallowuwnet 和MLLE 算法的运行时间小于所提算法,但所提方法能以较少的矩阵运算实现更为显著的图像效果,定性和定量的评价结果都优于这两种算法。此外,深度学习算法Shallow-uwnet 需要大量的模块训练时间,并且占据更大的内存资源。

表4 不同算法的运行时间Tab.4 Running time of different methods(s)
4.5 消融实验
为验证算法各组成部分的有效性,在数据集上随机选取图像进行消融研究。实验包括以下4 个部分:所提算法去除色彩补偿模块、所提算法去除背景光融合、所提算法去除透射率优化以及包含所有模块的本文算法,实验结果如表5 和图10 所示。

表5 消融实验的客观评价指标Tab.5 Objective evaluation indexes of ablation experiment
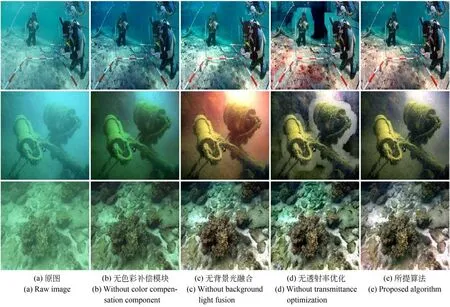
图10 消融实验结果Fig.10 Results of ablation experiment
由图10 可知,与原图相比,所提算法去除色彩补偿模块的图像对比度得到增强,但未能进行颜色校正;所提算法去除背景光融合的图像对比度和色偏得到改善,但仍存在色偏校正不彻底或引入其他色偏以及过度增强的现象;所提算法去除透射率优化的图像对比度得到有效增强,但仍存在部分色偏以及块状区域现象;包含所有模块的本文算法的图像颜色恢复自然,对比度得到显著提高,细节表现清晰,视觉效果最佳。
为了更加客观地评价各模块对算法性能的影响,选取2 个全参考指标和5 个无参考指标作为消融实验客观评价指标,如表5 所示。实验结果表明,各模块都有助于提高算法性能,本文算法实现了最佳性能。
4.6 应用测试
为验证所提算法的应用效果,采用SURF算法评估特征点匹配。特征点匹配是计算机视觉领域的核心任务之一,图像纹理特征越清晰,匹配的特征点数量越多。如图11 所示,选取3组代表性图像进行实验对比,其特征点匹配数目在图右上方。综合考虑各算法的主观评价和客观指标,所提算法的复原图像颜色自然,对比度高且细节清晰,客观评价指标中4 个最优,3个次优;而MLLE 算法细节增强明显,但颜色恢复不自然,整体呈现灰色调,局部过亮或过暗,客观指标整体不如所提算法;其他算法在亮度、颜色以及对比度等一个或多个方面有待改善。结合图11 可知,所提算法能够匹配到更多特征点,更有利于水下目标识别等工作。
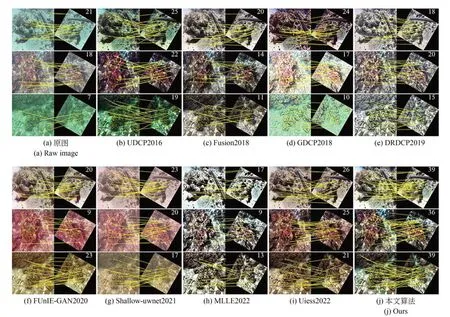
图11 特征点匹配Fig.11 Feature point matching
5 结论
针对复杂水下成像环境导致的图像颜色失真、对比度低和细节模糊等现象,简化大气散射模型的局限性以及背景光与透射率估计的准确性问题,本文提出一种结合色彩补偿与双背景光融合的水下图像复原方法。首先,结合Retinex与白平衡算法引入并求取色彩补偿分量,避免衰减过快的颜色通道影响;然后,根据背景光强度及颜色分布特性,提出双背景光融合估计算法,准确估计背景光;最后,利用水体背景颜色与散射系数的内在关系修正各通道透射率,进一步解决雾化导致的颜色损失,并使用引导-高通滤波优化透射率,降低噪声影响的同时增强细节信息。实验结果表明,该方法恢复的图像颜色自然、细节清晰、可见度高,具有更好的视觉效果;客观评价指标在多个数据集中整体较优,UCIQE和FDUM 指标分别较复原算法UDCP 提高17%和45%;较增强算法Fusion 提高14%和63%;较深度学习算法Shallow-uwnet 提高40% 和1.7倍。未来研究将进一步提高算法效率。
猜你喜欢
汽车工程师(2021年12期)2022-01-17 02:29:54
当代陕西(2020年14期)2021-01-08 09:30:42
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:44
数学物理学报(2019年6期)2020-01-13 06:08:16
中国眼镜科技杂志(2018年13期)2018-08-11 06:06:10
数学物理学报(2017年5期)2017-11-23 07:51:31
贵州师范学院学报(2016年4期)2016-12-01 03:54:07
激光与红外(2015年11期)2015-03-23 06:07:32
建筑材料学报(2014年6期)2014-03-11 17:08:59
计算物理(2014年1期)2014-03-11 17:00:48