
商用车智能混合动力转向系统的设计与研究
2024-04-27 11:30高建华
汽车工艺师 2024年3期
关键词:混合动力
高建华


摘要:智能驾驶是车辆未来发展的主要方向,为了使商用车实现智能驾驶的功能,设计开发了一款應用于商用车的智能混合动力转向系统。在传统的液压助力转向机构的基础上,增设一套电动助力转向机构,并通过电子控制单元ECU根据车速、转向盘扭矩、转角等信号,对整车提供实时、可变的转向助力,使车辆具有驾驶舒适性和安全性的同时,具备应急转向、随速转向、主动回正、自主转向、车道偏离预警和软件锁止等功能,满足未来车辆智能化驾驶、无人驾驶的需求。
关键词:转向系统;混合动力;智能驾驶
智能驾驶是车辆未来发展的主要方向,目前市场上商用车转向系统中广泛使用循环球液压助力转向器,不具备自主转向、辅助转向、车道偏离预警等功能,无法根据车速对助力特性进行调节,无法满足智能辅助驾驶的要求。
电动助力转向系统由助力电动机提供转向助力,可随车速控制助力大小,使汽车转向系统得到最佳的助力特性,但由于商用车前轴载荷较大,一般的电动助力转向系统所提供的助力无法满足商用车转向助力需求。因此,需要开发一种智能混合动力转向系统,满足未来车辆智能化驾驶、无人驾驶的需求。
智能混合动力转向系统的设计原理
根据商用车市场的需求,开发一种智能混合动力转向系统,在循环球液压助力转向系统的基础上,增设一套电动转向系统,同时配备车速传感器、扭矩转角传感器和电子控制单元(ECU)等。ECU通过监测车速和转向盘扭矩、转角等信号,控制电动助力大小,进而影响液压助力系统的助力大小,对整车提供实时、可变的转向助力。
同时,通过软件控制,使车辆具备应急转向、随速转向、主动回正、自主转向、车道偏离预警和软件锁止等功能。
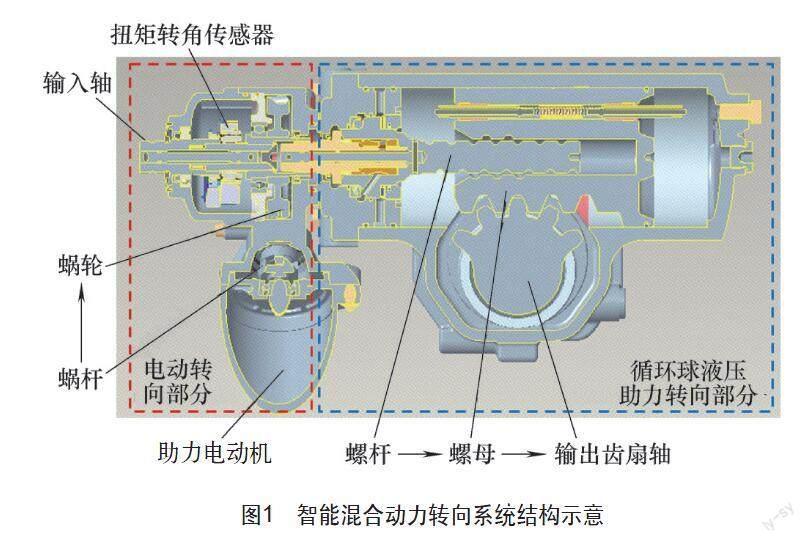
如图1所示,电动转向机构的输出端与循环球液压助力转向机构的输入端连接一起,扭矩转角传感器安装在电动转向机构的中间轴上,电子控制单元集成在电动机后端,构成了智能混合动力转向系统。
智能混合动力转向系统参数设计与匹配
1.混合动力转向系统的主要技术指标
商用车转向系统的主要技术指标有适用前轴负荷、助力缸径、摇臂摆角、总圈数、输出扭矩、油泵压力及传动比等。
在EPS助力模式下,具有转向轻便、助力随速可变、主动回正等功能。同时,根据整车CAN发出的转向角指令,驱动车轮伺服转向的自动转向功能等。
2.混合动力转向系统主要技术参数的确定
该款智能混合动力转向系统主要解决未来商用车智能化驾驶、无人驾驶的需求,应用于商用车市场。根据市场主流商用车车型转向系统的需求,根据系统结构,参考循环球液压助力转向机构和电动转向机构分别确定参数。
(1)循环球液压助力转向机构参数设计 循环球液压助力转向机构传动结构主要包括螺杆-螺母、齿条-齿扇传动副。
由循环球液压助力转向机构的结构关系可得:当转向盘转动一个角度j时,转向螺母及齿条的移动量为
s = (φ /360)P (1)
式中 P——螺杆/螺母的螺距。
相应的,齿扇转过角度β 。齿扇的啮合半径rw,则b角所对应的啮合圆弧长也为s,即
(φ /360)rw = 2ps (2)
结合式(1)和式(2),可得循环球液压转向机构的角传动比iw为
iw=φ /β=2prw= s (3)
根据 2rw=Z1mt (4)
结合式(3)和式(4)可得
iw=pZ1mt /P (5)
式中 Z1——齿扇整圆齿数;
mt——齿扇端面模数,mt= mn,根据齿条齿扇啮合强度计算确定。
根据设计要求,角传动比18.6左右。通过查阅循环球转向器齿扇模数表选定模数mt=8.6,整圆齿数Z1=12(齿扇齿数5齿),得到螺杆螺距P=17.4625,从而确定循环球液压助力转向机构的基本参数,见表1。
(2)电动助力转向系统参数匹配 电动转向机构主要由蜗轮蜗杆传动副组成,主要对助力电动机起减速增扭的作用。根据相关资料,选择转动惯量小、可靠性高的平行轴无刷永磁交流电动机,其额定转矩为8N·m,电源电压24V。
选择蜗轮蜗杆传递交错轴件的回转运动和动力,主要具有结构紧凑、传动比大、传动平稳及噪声低等优点。本结构选用蜗杆头数为双头的一对传动副,根据结构空间和需要减速增扭的需求,确定蜗轮齿数
41,模数2.2。通过《机械设计手册》新版蜗杆传动相关公式计算可得蜗杆传动基本参数表,见表2。
3.混合动力转向系统助力特性设计
车辆在不同行驶条件下,驾驶人输入的手力和转向系统提供的助力大小随之不同,以满足转向性能在低速转向轻便性和高速转向稳定性的要求。根据混合动力转向系统工作原理,所需电动转向机构部分助力大小与助力电动机转速近似成正比例关系,即电动机的转速越高,输出的助力越大,反之越小。同时,电动部分助力的大小直接影响液压部分转阀的开启,进而影响液压助力的大小。
因而,智能混合动力转向系统助力特性的设计需要根据行车工况,结合ECU对不同反馈信号的运算处理,控制助力电动机的助力大小,进而控制液压助力转向部分助力大小,为车辆提供实时可变的转向助力。
4.智能混合动力转向系统的工作原理及控制
智能混合动力转向系统工作原理如图2所示。ECU根据车速和转向盘转矩判断车辆的行驶状态,并依据嵌入的转向助力特性曲线数据确定所需的助力大小,由目标助力进一步判断决定系统的工作模式:当汽车低速或原地转向时,转向阻力矩非常大,液压助力与、电动助力同时工作,电动机可以根据车辆行驶状态调整电动机本身的助力大小以及液压助力的大小;汽车在中速或高速转向时,转向阻力矩较小,电动助力单独工作;当电动助力转向装置出现故障时,液压助力单独工作也能保证一定的转向助力。
此外,当车辆需要开启智能辅助驾驶时, ECU可根据智能辅助驾驶系统上位机的指令控制电动助力转向装置上的电动机动作,控制转向盘位置,控制原理如图3所示。采用位置环和电流环双闭环控制,ECU根据转向盘实际角度反馈和目标角度指令的差值,进行目标参考电流的计算,然后依据实际电流反馈,进行电动机驱动占空比的计算,实现对转向盘位置的闭环控制。
台架测试与验证
为进一步验证混合动力转向系统的各项性能,结合实验中心和同行单位资源,模拟整车转向系统结构,搭建测试平台(见图4)。包括测试台、模拟转向盘装置、需测试的混合动力转向系统及前悬部分,转向盘下的转向管柱处装有伺服电动机用来代替手力驱动转向盘,可实现转向盘角速度自动控制输入,将扭矩传感器安装在步进电动机减速机构输出端和转向管柱上端。同时,在系统前轴上端装有一套电控加载装置,用来模拟前轮的载荷,通过控制面板上的按钮可实现对轮胎的加载。经试验验证,基本满足设计需求。
结语
本文以商用车转向系统为研究对象,以满足商用车未来智能辅助驾驶为需求,在行业相关经验基础上,设计加工了一套智能混合动力的转向系统,并搭建测试台架对样机进行试验验证,通过验证表明该系统满足商用车智能化的需求。由于经验不足,加上试验不够充分,转向系统的助力特性不是特别理想,后续还需不断改进及优化。
参考文献:
[1] 孙营.重型商用车转向系统建模及整车动力学仿真研究[D].武汉:华中科技大学,2011.
[2] 孙叔雷.电动液压助力转向系统性能研究与分析[D].天津:天津理工大学,2018.
[3] 王乔.汽车电动液压助力转向系统的研究与开发[D].重庆:重庆交通大学,2015.
猜你喜欢
汽车科技(2017年1期)2017-03-10
汽车工程学报(2016年5期)2017-01-16
现代商贸工业(2016年14期)2016-12-27
科学与财富(2016年29期)2016-12-27
山东工业技术(2016年21期)2016-11-24
科教导刊·电子版(2016年16期)2016-07-18
科技与创新(2016年2期)2016-01-19
中州学刊(2015年12期)2016-01-14
汽车观察(2015年6期)2015-07-10
