一种基于无人机的输电线路登塔防坠方法
2024-04-23 09:23张雪,杨鑫
电力安全技术 2024年3期
张 雪,杨 鑫
(广东电网有限责任公司佛山供电局,广东 佛山 528000)
0 引言
攀登杆塔是输电线路检修工作中体能消耗高、心理压力大的作业之一。GB 26860—2021《电力安全工作规程》明确规定:“攀登杆塔和转移位置时不应失去安全带保护”,但由于一些防坠工器具需要停电加装且后期维护不当易损坏,或者人机功效差、使用不方便等原因,导致部分作业人员使用意愿不强,以致上下塔不采取保护措施,出现作业即违章的现象。
目前,常见的登塔防坠保护装置主要有两类:一是防坠落双延长绳、双钩防坠器、平安环,这类防坠工具使用过程中作业人员须改变原有的登塔习惯,体能消耗较大,登塔的坠落风险增加,以致一线班组使用意愿不强;二是加装防坠爬梯、防坠导轨、防坠钢绞线,这类防坠装置需要停电加装,成本高、投资大,后期维护难度大,仅适用于新建铁塔,不适合存量铁塔。
针对以上问题,通过采取无人机运载登塔保护固定支架和安保绳的方式,实现登高防坠全程“可视化+自动化”。与现有成熟防坠工具相比,该方法可有效解决当前固定式防坠导轨安装数量有限、后续再安装周期长以及防坠落双延长绳、平安环等临时性防坠措施使用不便带来的潜在隐患。
1 无人机选型
多旋翼无人机特征尺寸在80~200 cm之间,具有体积小、灵活度高、操控性能好、电磁兼容性与无线电抗干扰能力强、起飞着陆场地小、成本低等特点;正常作业环境下搭载有效荷载时,悬停时间不小于15 min;装有双GPS增稳系统,保证定点悬停时水平漂移量小于0.5 m,垂直漂移量小于0.3 m;绝缘安保绳与固定支架质量应不大于抛绳无人机有效荷载的80 %,满足DL/T 1482—2015《架空输电线路无人机巡检作业技术导则》要求。
经研究得出,安保绳固定支架的设计质量为4.5~5.5 kg,M600 PRO、M300 RTK、 T10三款无人机均可满足相应负载要求,其基本性能参数见表1。考虑到无人机悬停精度及挂载操作难度,载重量更小但悬停精度更高的M300 RTK四旋翼无人机成为首选。

表1 三款无人机的基本性能参数
M300 RTK无人机官方指导最大载重为2.7 kg,但实际测试发现其最大载重为5.5 kg。
2 无人机进入路径分析
输电直线塔高44.1 m,220 kV导线直径为23.88 mm,采用二分裂;500 kV导线直径为33.6 mm,采用四分裂。无人机简化模型机身(含旋翼)对角线长85 cm,机身(含旋翼)高度为20 cm,机身材料采用碳纤维,设置相关电气参数,相对介电常数为7,电导率为100 S/m。
式中,Req为等效分裂半径,R为分裂半径,m为分裂数,r为分裂子导线半径。
以220 kV电压等级模型为例,研究无人机在水平进入、45°进入、竖直进入、135°进入时,判断其电场最大值与其位置关系是否会引起故障。无人机不同进入路径下的电场数据如图1~3所示。

图1 水平进入时无人机表面电场分布

图2 45°和135°进入时无人机表面电场分布
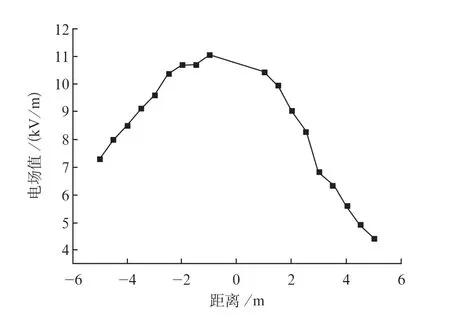
图3 竖直进入时无人机表面电场分布
由图1~3可知,无人机表面最大电场强度随着与边相导线距离的增大而减小。一般而言,在10 kV/m的电场强度下,电子元器件的性能就会受到影响。无人机水平进入且距离导线5 m左右时,无人机表面电场值就达到了10.39 kV/m;竖直方向进入时,无人机与导线的距离是以边相导线为水平线向上移动,距离-1 m左右时电场值最大,为11.04 kV/m;45°和135°方向进入时,电场值随距离的增大而减小,在距离小于等于3 m左右时,135°进入时电场值略小于45°进入。
经实测,水平方向进入时,电场最大值位于机翼,在距离导线较远时最大值在靠近导线侧机身处,转轴连接处电场值也较高;45°进入时,电场最大值从转轴连接处转移到机翼。
因此,无人机在飞行过程中应平稳,尽量避免快速上升、下降。无人机运载登塔保护固定支架和安保绳飞至铁塔顶端,具体路径为先水平进入,到达挂点位置时再上下移动,无人机在移动过程中要保持与带电导线的安全距离。
3 基于无人机技术的登塔防坠方法
3.1 登塔防坠原理
基于无人机技术的登塔防坠方法原理为通过无人机运载登塔保护固定支架和安保绳飞至铁塔顶端,利用固定支架的自锁紧机械机构,在实时视频图传辅助下,实现固定支架在塔顶快速安装与拆除;安保绳一端固定在登塔保护固定支架,另一端固定于塔底,防坠器与安保绳连接后形成完整的保护措施,可有效保障登塔人员的安全(见图4、5)。

图4 基于无人机技术的登塔防坠方法路径

图5 防坠原理
3.2 操作流程
3.2.1 起飞前准备
一是检查电池电量,确保无人机与遥控拓展电池电量大于80 %;二是检查无人机结构,确保机臂完全展开且机臂卡扣固定牢固,无人机脚架安装完成且固定牢固,无人机桨叶完全打开;三是检查无人机功能,确保无人机遥控连接正常,遥控显示无人机自检无报错,遥控实时动态载波相位差分技术功能正常,无人机下部照明功能开关可正常打开与关闭,无人机遥控摇杆定义正常;四是检查无人机下部避障,确保避障关闭以防无法进行降落操作;五是确认抛投器功能正常;六是确认无人机端可视化多关节柔性载具与登塔保护固定支架、安保绳以及与飞机上的舵机连接完成。
3.2.2 飞挂操作
控制无人机飞至指定位置进行挂钩装置的放置动作,待挂钩安装卡挂到位后操作无人机下降使其与固定支架挂钩脱离,并通过无人机拍摄挂钩卡位图片,确认装置已卡挂牢固,即完成飞挂操作。在无人机携带机端可视化多关节柔性载具返回且接近地面时,通过遥控器打开无人机下视探灯来打开抛投器销杆,将机端可视化多关节柔性载具与无人机脱离,脱离后无人机正常落地即可。
3.2.3 安保绳固定与登塔
在完成登塔保护固定支架的安装作业后,地面工作人员将安保绳一端固定于塔腿,并安装防坠器。施工人员将安全带与塔上安保绳通过速差高空防坠自锁器连接牢固,由安全员检查确认各部位连接可靠后,施工人员方可开展爬塔登高作业。
3.2.4 固定支架拆除
通过控制无人机飞至指定位置进行装置的抓取动作,操作人员通过地面端图像监测辅助系统观察无人机端的可视化载具挂钩与固定支架挂钩连接后,操作无人机垂直向上飞,使固定支架与铁塔分离并返回地面。
4 结束语
基于无人机技术的登塔防坠方法可有效消除当前固定式防坠导轨安装数量有限、后续再安装周期长以及防坠落双延长绳、平安环等临时性防坠措施使用不便进而影响登塔动作连贯性所带来的潜在隐患,同时可实现登塔全过程的防坠保护,有效减轻了登塔人员的心理压力,降低了坠落风险。
猜你喜欢
军事文摘(2023年11期)2023-06-09
中国化肥信息(2022年3期)2023-01-05
公民与法治(2022年6期)2022-07-26
宁夏工程技术(2021年2期)2021-07-30
机械(2020年6期)2020-07-15
阅读与作文(小学低年级版)(2020年2期)2020-05-25
艺术科技(2019年15期)2019-11-23
传媒评论(2017年9期)2017-12-20
中国总会计师(2016年2期)2016-03-28
电测与仪表(2015年21期)2015-04-09