一种新型双臂协作消化道手术机器人的结构设计与运动学分析
2024-04-22 09:27王盛松张涛程天宇苏静杜付鑫
机械工程师 2024年4期
王盛松,张涛,程天宇,苏静,杜付鑫,3,4
(1.山东省食品药品审评查验中心,济南 250014;2.山东大学 机械工程学院,济南 250061;3.高效洁净机械制造教育部重点实验室(山东大学),济南 250061;4.山东大学 控制科学与工程学院,济南 250061)
0 引言
内镜下微创手术在早期的诊断和治疗方面展现出极大的优势。相较于传统的开放性手术,内镜下微创手术能减少创伤和术中出血、降低手术风险,减轻操作医生的疲劳度,提高手术的成功率[1]。目前其显著的医疗诊断和治疗优势受到了广泛的认可,并且深受患者的青睐[2]。然而内镜下微创手术经消化道进行,空间狭窄,对医生的要求较高,限制了其大范围的应用[3]。
如今,各种手术机器人已经逐渐应用于心脏外科、泌尿外科及骨科手术等方面[4-5]。相较于传统的内镜下微创手术,消化道手术机器人辅助下的微创手术具有高灵活性、高柔性及高精度的优势。但该机器人存在操作臂自由度不足、末端控制信息不准确等问题,目前还未进入临床应用阶段。
连续体机械臂已逐步应用于消化道手术机器人的末端操作臂,连续体机械臂具有尺寸小和高灵活性的特点。连续体机械臂的主要构型有关节式、同心管式、切口式等[6],目前已广泛应用于医疗[7]、救援[8]、航空航天[9]等领域。不同的连续体构型应用于消化道手术机器人的研究仍需进行更加深入的探索。
本文设计了一种新型双臂协作消化道手术机器人系统,提出一种基于弹性元件的快速更换装置,可以在手术中实现夹钳、剪刀、电刀等多种器械的快速更换。
1 手术机器人系统结构设计
1.1 手术机器人构型选择
在满足尺寸要求的情况下,消化道手术机器人的操作臂需要具备较高的负载能力和足够的自由度。以胃镜下黏膜剥离术(ESD)为例进行手术机器人的具体需求分析。根据需求本文设计了一种消化道手术机器人系统,机器人结构如图1所示。该机器人手术系统由内镜的驱动与执行机构、连续体操作臂的驱动与执行机构和中间传动机构3部分组成。

图1 系统整体示意图
1.2 可驱动内镜设计
可驱动内镜由驱动机构、执行机构及中间传动机构3部分组成。本文设计了一种可以进行自由弯曲和旋转的可驱动内镜,如图2(a)所示,内镜末端提供“Y”形通道使操作臂形成环抱式结构。如图2(b)所示,采用丝驱动连续体结构降低驱动内镜的尺寸。驱动机构采用圆周分布的滚珠丝杠副,以提供更大的驱动力,并且使用丝鞘机构进行长距离传动。
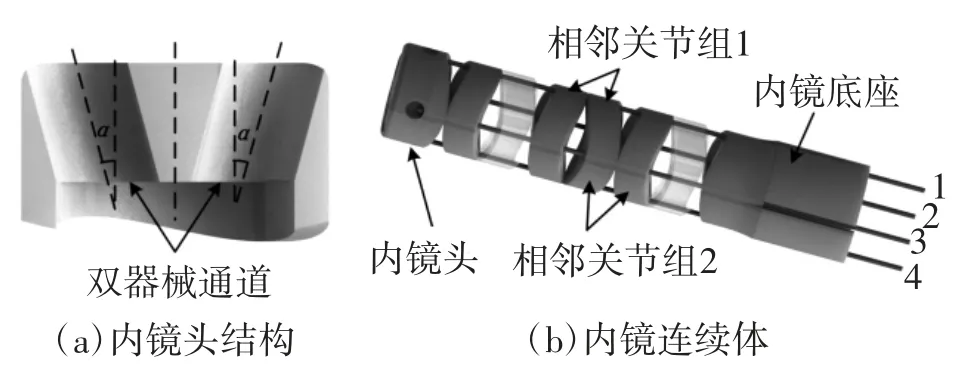
图2 可驱动内镜整体结构示意图
1.3 连续体操作臂设计
本文提出的连续体手术操作臂具有弯曲、旋转、直线进给及执行机构夹持自由度,并且提出一种快速更换装置,以实现多种手术器械的快速更换。如图3所示,快换片一端伸出电动机安装架,起按钮作用,卡紧部位设有楔形面,与弹簧配合可以实现自动锁紧功能。

图3 操作臂快速更换装置示意
2 运动学分析
本节建立的正运动学模型是针对单段离散关节式连续体,主要内容为实现驱动空间到工作空间的映射。
在对操作臂进行运动学分析时应考虑到内镜连续体端口处的倾斜角度对连续体操作臂的影响。图4所示为连续体操作臂弯曲结构示意图。连续体操作臂具有进给、单方向弯曲及轴向旋转的自由度,Φm为整体偏转角度,Θm为弯曲角度。根据常曲率假设,θm为相邻两关节之间的夹角,有θm=Θm/(n+1),则驱动丝变化量与弯曲角度的关系如下:
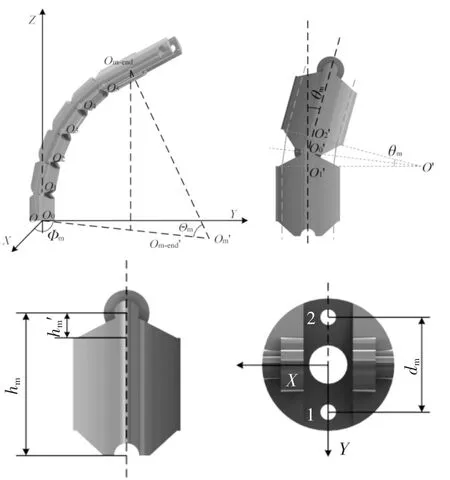
图4 连续体操作臂弯曲结构示意图
式中:dL_base与dL_clamp分别为底座与夹钳基座中穿线孔的长度,lmi_total为第i根驱动丝在连续体操作臂内的长度,Δli为第i根驱动丝的绳长变化量。
连续体操作臂的弯曲情况与末端姿态的关系式如式(2)所示,hbase为底座的底面到其顶端圆柱中心的长度,xend、yend、zend为夹钳基座末端点的坐标,b为夹钳基座的姿态向量。
由于操作臂的纵坐标同时受弯曲和进给的影响,纵坐标的逆运动学求解只能用xn或者yn的方程求解:
基于最小二乘法,利用四次方程z=ax4+bx3+cx2+dx+e对轨迹进行拟合,xn、yn、zn的关系为:
其中,Ra为常数。
由三角函数求和公式可得:
将式(6)代入式(5)得
3 仿真分析
本节建立的正运动学模型是针对单段通过分析人体消化道尺寸及常见早期病灶尺寸,可将操作臂的工作空间确定在一个直径不小于25 mm的球体内[10]。
在连续体内镜直立时,如图5(a)所示,双操作臂的工作空间在坐标系Oe-end的XOZ平面上的投影将直径为25 mm的圆包含,可满足设计要求。如图5(b)所示,双操作臂的公共工作空间同样满足设计要求。

图5 双臂工作空间
4 实验分析与验证
4.1 运动学模型验证
为验证本文提出的正逆运动学算法的准确性,搭建运动学实验平台进行验证。如图6所示,连续体操作臂的外径为3.5 mm,穿线孔之间的距离为2.5 mm,连续体操作臂总长度为34.7 mm,磁跟踪装置用于获取连续体操作臂的末端位置。实验过程中使连续体操作臂从原点出发。反复进行双向弯曲,两方向上分别选取9个目标点,各点均位于图7(a)中的理想轨迹上。根据目标位置的X、Y坐标确定其双驱动丝的驱动情况,进而得到末端位置,将其与实际位置进行比较。
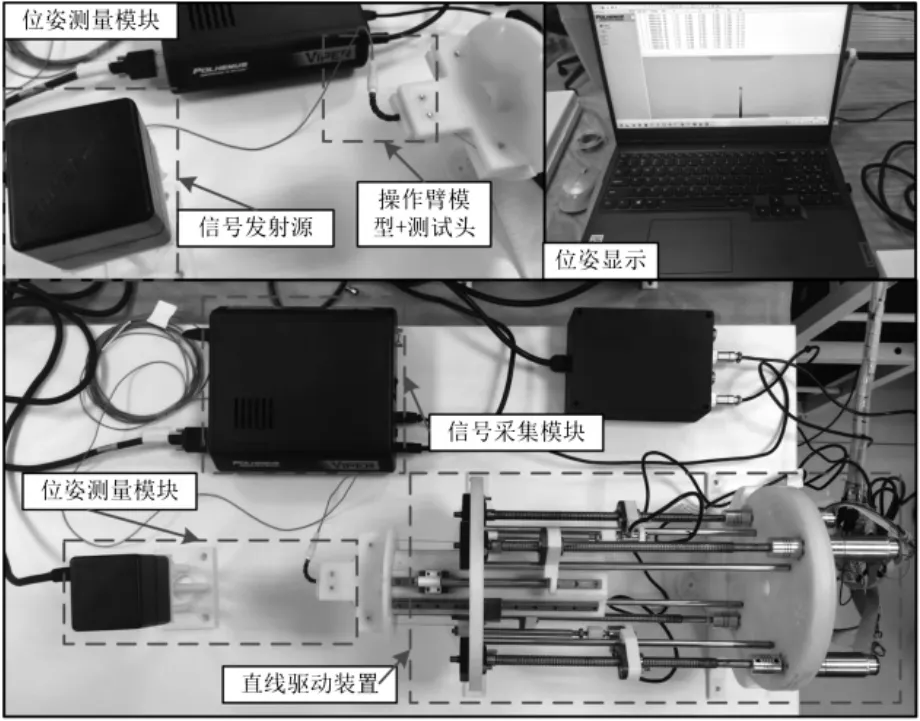
图6 运动学实验装置

图7 实验结果及误差分析
连续体机械臂双向弯曲运动时,位置误差为所取样点的实际坐标与理想坐标点之间的直线距离,实验结果表明,连续体操作臂的定位误差在1.5 mm以内,占总长度的比例小于5%。
4.2 运动性能验证
为验证该消化道手术机器人的运动性能,进行单臂操作臂实验验证,模拟机器人手术操作过程。如图8所示,实验结果显示,操作臂在平面内做圆周运动时平均运动精度在1 mm以内,本文提出的消化道手术机器人具有较高的轴向传动精度。

图8 XOY平面内末端曲线运动及误差分析
5 结语
消化道手术机器人辅助下的微创手术因其高灵活性、高柔性及高精度的优势而受到广大研究人员的关注。本文设计的一种新型双臂协作消化道手术机器人系统,应用一种基于弹性元件的快速更换装置。对消化道手术机器人的新构型进行正逆运动学分析,分别对连续体内镜和连续体机械臂的工作空间进行仿真分析,仿真结果显示,上述工作空间均能满足手术机器人的工作空间需求。实验结果显示,该消化道手术机器人具有较高的轴向传动精度,连续体操作臂的定位误差在1.5 mm以内,表明正逆运动学算法准确性较高。
猜你喜欢
现代畜牧科技(2021年6期)2021-07-16
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2018年11期)2018-11-23
饲料与畜牧(规模养猪)(2016年5期)2016-12-01
腹腔镜外科杂志(2016年10期)2016-06-01
海军航空大学学报(2015年1期)2015-11-11
天津护理(2015年4期)2015-11-10
中国医疗美容(2015年1期)2015-07-12
山西大同大学学报(自然科学版)(2015年1期)2015-01-22
机械制造与自动化(2014年1期)2014-03-01