
流域生态治理工程中无人机大比例尺测图技术运用分析
2024-04-20 13:26赵智
工程建设与设计 2024年7期
赵智
(晋中市水利勘测设计院有限公司,山西 晋中 030600)
1 引言
流域生态治理具有改善环境的效果,通过无人机测图可对生态情况进行检测,得到准确的地形结构,便于对流域治理效果进行检验。本文以潇河为研究对象,围绕项目展开分析,对无人机测图方法进行全面探索,并对测量精度进行控制,确保测量结果与流域生态相匹配,以及无人机精度控制取得有效进展,最终使流域治理状态良好。
2 工程概况
潇河发源于山西省昔阳县沾尚乡陡泉山西麓的马道岭,在昔阳县境内,其上游有白马河和松塔河两大支流,松塔河为主流。松塔河发源于昔阳县沾尚乡马道岭,先后汇入龙泉河、木瓜河后,在寿阳县芦家庄与白马河汇合;在晋中市榆次区,在东赵乡大发村龙门河汇入,在北合流涂河汇入,在源涡村出山口进入平川区。源涡以下有涧河和牛耕河汇入,流经清徐县,在太原市小店区的洛阳、南马村之间汇入汾河。潇河属于用水矛盾突出的地区,随着水资源的持续开采,流域生态环境不断恶化,存在地下水位下降情况。潇河流域内年均降水量418~483 mm,蒸发量高达2 068.5 mm,流域缺水情况严重。潇河区域紧急开展流域生态治理工程,采用无人机大比例尺测图技术对流域情况进行分析,对流域生态进行全面监测,并把控细节部分,保障生态治理得到持续化监测。经过长期的流域监测与治理,潇河生态环境得到显著改善,水位埋深由治理前的30.6 m 上升至24.5 m,形成旱区湿地894 km2,让潇河流域在生态流量上重获新生,流域生态治理取得突破性成果。
3 流域生态治理工程中无人机大比例尺测图技术运用
3.1 飞行路线
本工程流域分布范围较广,需对无人机飞行路线进行设计,提高对河水流域的覆盖面,保证飞行路线满足监测要求。潇河整体形状为长条状,河道两岸均需布设无人机,沿河道线方向飞行,对河道周边景象进行拍摄,便于分析河道地图。航带网法是飞行路线布设的常用方法,如图1 所示,需根据航线进行绝对定向控制,合理对网络结构进行使用,对河道形成全方位覆盖。无人机飞行路线在三维坐标体系下,便于对无人机及监测点位置进行描述,确保无人机能够沿预定线路飞行,对无人机的运行状态进行控制。飞行线路设计应避免重复性,沿预定方向一次检测成型,避免产生重复性的测图工作。流域生态采用多台无人机进行拍摄时应做好无人机的协同控制,让无人机沿不同方位飞行,提高对监测区域的覆盖面,实现对飞行线路的综合运用[1]。

图1 基于航带网法的飞行路线示意图
无人机飞行路线具有航高控制要求,以保证拍摄成图具有良好的分辨率,对流域情况进行大比例尺测量。无人机航高计算公式为:
式中,H为摄影航高,m;f为镜头焦距,m;α 为像元尺寸,m;GSD为影像分辨率。
通过这种方式,提高对航高的控制作用,根据流域影像分辨率确定航高,使航高选择具有理论依据,保障航高能够得到有效取值。
3.2 像控点布设
无人机大比例尺测图需对像控点进行布设,用于对指定流域进行监测,确保无人机测图具有一定的针对性。像控点需按照规范进行布设,做好像控点间距的控制,如1∶1000 航空比例尺测量时,像控点间距一般在250 m 左右,确保满足大比例尺测图条件。像控点布设注重实际环境的考量,对像控点的具体坐标进行确定,做好像控点的标记工作,保证像控点能够覆盖监测区域。如图2 所示,为八点法布设像控点,在每段航带网内布置8 个平高像控点,每个航带内像素点位置相对应,便于对像控点误差进行控制。需注意,像控点观测期间应避免使用对讲机、手机等设备,防止对信号源造成影响,导致无人机的测图精度下降。通常情况下,以特征鲜明的位置作为像控点,确保与地表形成鲜明对比,提高对周围地物特征的辨识能力,实现对像控点的精准定位。针对不存在明显像控点的情况,可布设人工像控点,如采用红色油漆标记地块,增强地物的可辨识性,使像控点布设能发挥效果。
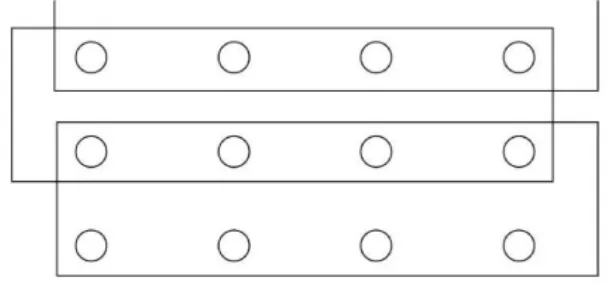
图2 八点法布设像控点
3.3 数据采集
无人机测图过程中,需采用合理化的数据采集形式,保证数据采集的精准性和全面性,得到清晰的流域生态影响。数据采集应用RTK 模式,对流域情况进行密集匹配,确保大比例尺状态下数据采集能精准无误,保障数据采集过程能够顺利进行。数据采集具有拍摄间距的要求,在地面分辨率1.5 cm、航向重叠率80%情况下,拍摄间距通常控制在10~15 m,形成具有连续性的拍摄图像,便于生成地图全景。数据采集需在无风、晴朗的天气下,消除拍摄过程对数据采集的影响,得到准确信息,降低环境因素影响。数据采集需注重衔接区域的覆盖,确保首尾图像连接的精准程度,根据重叠度情况实现有效连接,防止测量过程中出现数据丢失的情况[2]。
3.4 空三测量
空三测量是实现三维建模的关键,通过无人机采集准确的流域信息,需要满足测量环境条件的要求,获得流域像素点的精准位置。空三测量需要对影像单元进行密集处理,结合比例尺情况对拍摄视角进行调节,保证拍摄后影像能够与实际场景相符,通过测量操作对误差进行限制。空三测量需具有精密的导轨条件,以无人机所在位置为原点,构建X轴和Y轴方向的导轨,采用坐标法对流域中像素点视差情况进行解析,实现对视差的有效控制。视差计算方法如下:
式中,xi、yi为测点的X、Y轴坐标。
视差分析是保证空三测量精度控制的关键,需关注公共点的连接情况,确保视差中的同名点相对应,提高视差控制方法的有效性。空三测量易产生视差问题,可通过视差计算消除误差,将误差控制在3 个像素点内,防止在实际测量环境中产生较大偏移,实现对空三测量坐标位置的精准确定。
3.5 三维建模
流域生态环境数据需要进行三维建模,根据图像采集情况生成数字表面模型,同时需要对三维模型的误差进行修正,提高流域地图的建模效果。三维建模基于空间坐标展开计算,如图3 所示,点A为机载GPS 天线相位中心,点S为航摄仪投影中心,根据坐标分量的控制条件,可得到如下三维模型关系:

图3 无人机大比例尺测图三维模型
式中,式中,XA、YA、ZA和XS、YS、ZS分别为点A、S两点的空间坐标;R表示影像外方位元素的3 个角元素u、v、w所构成的正交变换矩阵。
通过三维建模可对无人机进行实时控制,得到无人机的最佳控制条件,对无人机位置进行调节,采用坐标法对流域生态进行测量。三维模型解算过程中需要具有清晰的层次感,基于DEM 数据对影响进行纠正,形成多角度的影像映射,同时确保影像具有连续性,对三维模型的完整性进行控制[3]。
三维建模过程中需实现纹理的贴合控制,通过纹理控制提高图像的清晰度,形成纹理清晰的流域生态影像。图像纹理基于计算机视觉技术展开修正,根据多图像对比生成AI 算法,实现对纹理的自动校正,提高对地图纹理的处理效率。大比例尺地图需要具有清晰的纹理,否则将会影响到流域生态的辨识效果,不利于地形图具体情况的掌控,可见,实现模型有效贴合具有必要性。
3.6 成图指标
无人机测图过程中需对成图质量进行控制,结合成图指标的要求,掌握成图质量控制的要点。成图指标控制包括以下两个方面。
1)成图质量指标。无人机拍摄过程中,需避免出现图像不清晰的情况及图像中出现盲区或盲点,导致地图的关键区域存在遮挡,无法对指定流域情况进行识别。
2)成图精度指标。大比例尺测图在误差方面具有较高要求,需要合理对像控点、空三测量、三维建模过程进行分析,掌握误差控制的关键点,防止因误差未达标而增加额外工作量,导致流域的成图精度不足。成图指标需要结合图像的实际情况,将像控点导入图像中,解决空三加密中的残差问题,保证空三加密中的图像衔接效果,便于生成三维建模的实景模型,提高成图指标控制的有效性。成图指标控制核心在于数据处理,根据数据精度情况进行匹配,结合成图指标情况进行控制,去除不精准的控制点,对精度不足情况进行重测,导入准确的空间信息,进而降低误差的影响范围[4]。
3.7 精度控制
误差控制是保证成图质量的重要环节,需对流域平面中误差控制效果进行分析,确保误差控制能发挥作用,防止产生较大误差。平面位置中误差控制情况如表1 所示,在比例尺为1∶500、1∶1000、1∶2000 情况,不同平面位置误差情况均小于检查点精度等级要求,说明成图的精度控制效果良好。
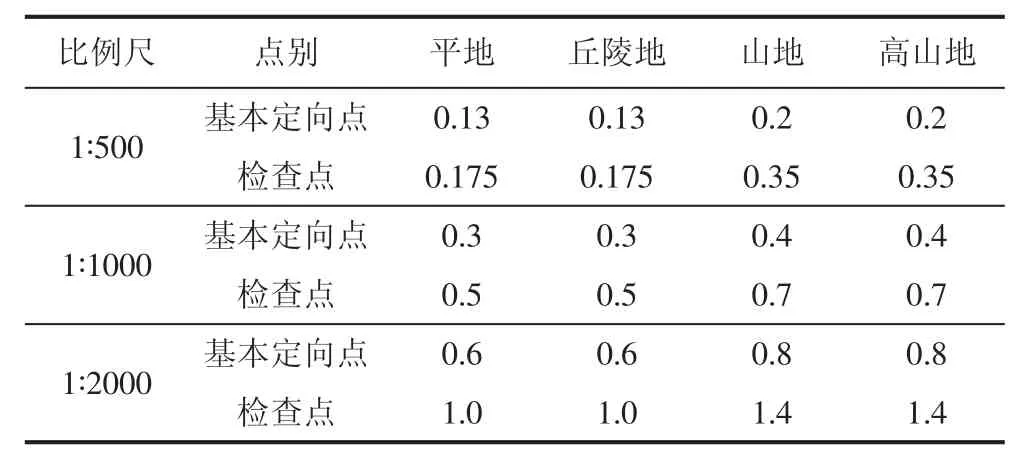
表1 平面位置中误差控制情况
4 结语
综上所述,无人机大比例尺测图在流域生态治理中具有重要作用,需确保测图技术应用的合理性,解析测图的精度控制过程,提高对成图质量的控制效果。无人机测图速度快、适度高,可实现对流域生态的可视化测绘,并借助三维模型进行分析,发挥实景测量的优势,生成的地形图更具可靠性。无人机测图具有较高的技术要求,需采用规范的操作形式,做好无人机飞行控制与成图效果,降低无人机测图中的误差影响。基于精度控制方法确保无人机测量与流域环境相适应,提高对误差的制约能力,得到具有分析价值的流域地形图,实现流域治理效果的精准分析。
猜你喜欢
中国水土保持(2022年6期)2022-06-08
中国水土保持(2021年7期)2021-07-08
中国水土保持(2021年12期)2021-04-11
写真地理(2020年39期)2020-12-23
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
电子制作(2018年17期)2018-09-28
企业科技与发展(2018年5期)2018-09-10
通信电源技术(2018年5期)2018-08-23
