
基于爬墙机器人搭载高频雷达外墙保温装饰连接构造成像技术研究
2024-04-20 13:26王万金袁玉闫海鹏
工程建设与设计 2024年7期
王万金,袁玉,闫海鹏
(中国建筑科学研究院,建筑安全与环境国家重点实验室,北京 100013)
1 引言
建筑外墙围护系统是建筑的重要组成部分,一般由结构墙体、粘结或锚固组件、保温层、装饰层组成,不仅承担建筑防护、保温隔热、装饰等建筑功能,还需抵御来自外部自然环境的不利影响,因此在长期的服役下,外墙的保温层和装饰层开裂、松动、脱落时有发生,已经成为城镇建筑的安全隐患重要风险源。特别是外墙外保温层的脱落,石材幕墙的坠落,已经造成了大量的生命和财产损失。但是对建筑外墙的安全隐患检测手段有限,近年来,采用旋翼无人机搭载可见光成像和红外成像可有效对高层和超高层建筑外墙的裂缝、渗漏、脱落进行有效检测,取得良好的效果。由于外墙结构体系多样,影响外墙外保温和装饰层牢固度的主要因素是与墙体的粘结或连接性能,对于保温板体系来说,保温板与墙体的粘结面情况直接决定其牢固程度,对于石材幕墙来说,其背后的龙骨及锚固状况影响其稳固性,但是如何对这些隐蔽构造探测仍是难题之一。
目前,对高层或超高层建筑外墙隐蔽构造探测的难点在如何爬上去定位和精确探测问题[1],采用爬墙机器人作为搭载平台,搭载雷达探测仪是有效的解决方案。爬墙机器人能够精确爬升定位到指定检测部位,效率高、安全可靠、成本低。采用高频雷达扫描仪,可大幅度提高探测精度[2],利用外墙外围护体系中各种构造材料介电常数的差异性,实现对电磁波发射和反射接收的差异性,通过电磁波信号的去噪、滤波、数字化转换,实现对探测物空间、形态的成像显示,提供对隐蔽构造的定性和定量化的探测识别,是一种高效非接触式的无损检测手段[3-4],具有快速、高效、高精度的特点,在外墙保温材料粘结面积测定、幕墙龙骨检测和安全性能评估具有广阔的应用前景。
2 爬墙机器人搭载高频雷达扫描仪构成及工作原理
2.1 高频雷达探测爬墙机器人的基本结构及功能
高频雷达探测爬墙机器人(见图1)是由中国建筑科学研究院设计并制造的一款建筑爬墙探测机器人,能够在垂直墙面或倾斜表面上上下和左右自行运动的机器人。由执行机构、驱动装置、检测装置和控制系统等组成,主要包含爬升动力仓、反推动力风扇、供电仓、探测设备搭载仓、信息采集储存传输模块、软件系统、手持遥控器及悬挂系统。其高频雷达中心频率6 ~8 GHz,爬墙速度0 ~10 m/s,爬升定位精度为±1.0 mm。其电测波穿透深度大于50 cm,能够对外墙构造进行探测,实现对保温板与墙体的粘结、石材幕墙龙骨、层状缺陷进行扫描成像。对粘结面积、空鼓面积、龙骨与锚固点进行定性和定量化探测。

图1 高频雷达探测爬墙机器人
2.2 高频雷达探测爬墙机器人工作原理
高频雷达探测爬墙机器人工作时,通过悬挂系统悬吊在待测外墙上,开启爬墙机器人和反推动力风扇,将雷达探测仪贴紧墙面,爬墙机器人搭载探测雷达沿吊挂钢丝绳间歇式上升,每上升5 cm,高频雷达扫描仪横向扫描一行,再爬升一格,再扫描一行,形成往复的扫描采集过程,直到得到指令结束扫描。采集的雷达扫描数据通过存储传输模块下载,通过专用软件系统对扫描数据进行去噪、滤波、增益、数字化处理后,形成可视化透射成像,人们可直观看到外墙面板连接的构造成像图。
3 外墙外保温黏结构造成像测试验证
3.1 外墙外保温实体模型制备
在实际砌筑墙体上,采用EPS 保温板、粘结砂浆、网格布、抹面砂浆等材料,按照JGJ 144—2019《外墙外保温工程技术标准》标准方法制作薄抹灰外墙外保温系统,粘结形式为点粘法、点框法、条粘法和满粘法,所制作的试验墙如图2 所示。

图2 薄抹灰系统外墙外保温测试墙
3.2 外墙外保温粘结构造成像测试与分析
把高频雷达探测爬墙机器人采用悬架系统吊装在测试墙面上,按照装备的操作规程开启爬行扫描探测作业,分别对试验墙进行了扫描,见图3,扫描数据处理后形成的可视化成像见图4,可见对保温板背后的灰饼、灰条成像清晰,通过将预设的粘结灰饼布局和实际扫描成像叠加对比可以得知,扫描成像与实际分布的位置、大小吻合,通过对粘结灰饼的面积计算,可以得到粘结面积率。说明该高频雷达探测爬墙机器人的爬升定位精度、扫描成像精度可达到95%以上,可实现对保温板粘结面积的定性和定量化测定,可作为外墙隐蔽构造的探测成像检测手段。

图3 高频雷达探测爬墙机器人测试
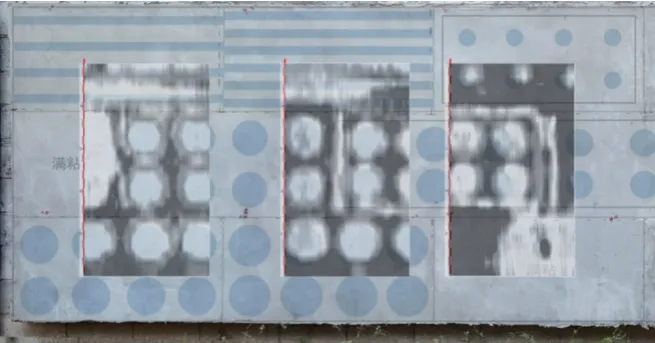
图4 高频雷达成像图与墙体实际图对比
4 高频雷达探测爬墙机器人在实际工程中的应用
4.1 高频雷达探测爬墙机器人在外墙外保温粘结面积比的测定
常熟市某小区4#楼地上18 层,钢筋混凝土结构,以EPS保温板薄抹灰保温系统,外饰面1 ~3 层为瓷砖,4 层及以上为涂料装饰层。表观已经有多条裂缝,采用高频雷达探测爬墙机器人对西侧山墙抽样选取了4 个区域进行了保温板粘结面积的成像扫描,高频雷达成像图见图5,粘结面积率分别为37%、24%、12%、22%,均未达到40%以上的设计要求,可见其对保温板的变形约束力弱,是墙面开裂的主要原因之一,且脱落的风险隐患较大。

图5 4#楼保温板粘结面积率检测
杭州某住宅26#楼地上22 层,钢筋混凝土结构,外墙采用30 mm 无机轻集料保温砂浆、抗裂砂浆及耐碱玻璃纤维网格布组成的隔热层,1 ~2 层为外贴大理石饰面,3 ~22 层为真石漆饰面层。墙体表观完好。采用高频雷达探测爬墙机器人对东侧山墙抽样选取了2 个区域进行了保温层粘结面积的成像扫描件,高频雷达成像图见图6,粘结面积率分别为82%、85%,保温层与基层墙体的实际粘结率很高,墙面空鼓的风险较小。

图6 26#楼轻质砂浆保温层粘结面积率检测
4.2 高频雷达探测爬墙机器人探测石材幕墙龙骨锚固构造成像测定
常州某建筑外围护为幕墙装饰构造,玻璃幕墙和干挂石材幕墙组合。采用高频雷达探测爬墙机器人对石材幕墙区域进行了龙骨和锚栓进行了探测,高频雷达成像图见图7,从雷达成像透视图可以看到,龙骨和锚固点可清晰呈现出来,龙骨整齐,锚固点完整。该项工程实际扫描测试,可以为石材幕墙类构造的隐蔽结构的无损探测提供新的探测思路和手段,为判断评估幕墙安全健康状况提供基础数据。
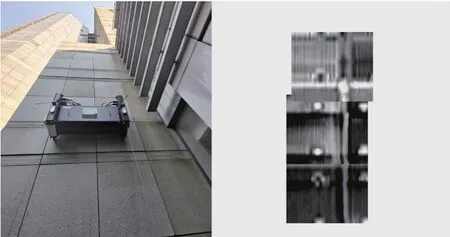
图7 高频雷达探测爬墙机器人对石材幕墙龙骨锚固成像扫描
5 结语
针对高层和超高层建筑的外墙保温装饰层的粘结锚固构造的检测难点问题,采用爬墙机器人搭载高频雷达探测成像技术是可行的,高频雷达探测爬墙机器人可实现高层和超高层建筑墙面上实现可控上下攀爬和准确定位,为高层及超高外墙的无损检测提供了高效快捷的工具。
通过建立典型的外墙薄抹灰保温体系构造试验墙,采用高频雷达探测爬墙机器人进行探测验证,表明高频雷达探测可实现对保温板粘结构造层的成像探测,可精准地探测出粘结面积率,为建筑外墙外保温隐蔽的粘结面积率测定提供了精准的检测方法。
通过对选取的建筑薄抹灰保温系统、保温砂浆保温系统和石材幕墙系统工程建筑进行了实际检测应用,表明爬墙机器人可安全、方便、准确地爬升到指定位置进行探测。实现了对保温板粘结面积率的准确成像和测定,也可有效测定抹灰轻质保温浆料和墙体的粘结情况,为保温层与墙体的实际粘贴质量和安全健康评估提供了有效数据。
高频雷达探测爬墙机器人可清晰实现对石材幕墙的龙骨与锚固构造点的成像探测,为石材幕墙的无损监测提供了新的手段。
猜你喜欢
现代雷达(2023年11期)2024-01-05
成都信息工程大学学报(2018年5期)2018-12-06
测控技术(2018年3期)2018-11-25
水利规划与设计(2017年6期)2017-07-18
北京航空航天大学学报(2017年12期)2017-04-23
小猕猴学习画刊(2016年4期)2016-11-19
山西建筑(2016年23期)2016-11-03
故事作文·低年级(2016年2期)2016-09-10
水利科技与经济(2016年4期)2016-04-22
大连工业大学学报(2015年4期)2015-12-11
