基于计算机视觉的交通灯识别系统设计
2024-04-18 01:38:24陈富强
装备制造技术 2024年2期
陈富强
(广西北部湾国际港务集团有限责任公司科技信息部,广西 南宁 530021)
0 引言
随着智能交通系统和自动驾驶技术的快速发展,交通信号灯的准确识别和解析成为了一个重要的研究领域。交通灯作为道路交通的核心调控设施,其信号状态的准确识别对于保障道路交通安全和流畅具有至关重要的作用[1,2]。在自动驾驶领域,车辆对交通灯信号的准确识别和响应是实现安全驾驶的关键。随着越来越多的自动驾驶车辆进入实际道路测试和商业运营,对交通信号灯自动识别系统的需求日益增加。
近年来研究人员开始探索结合深度学习技术的交通灯检测方法。这些方法通常基于卷积神经网络(CNN)等机器学习模型,能够自动学习和识别交通灯的复杂特征。虽然这些方法在识别准确性上取得了显著进步,但它们通常需要大量的标记数据进行训练,并且在计算资源和处理速度上有较高的要求。因此,对于资源受限的应用场景或需要实时处理的系统而言,这些方法不太适用[3]。相比之下,基于OpenCV(开源计算机视觉库)的方法在资源消耗和实时性能方面具有优势,能够在多种硬件平台上高效运行,特别适用于车载系统和边缘计算设备。OpenCV 作为一个广泛应用的图像处理和计算机视觉库,提供了丰富的算法和功能,成为研究交通灯检测的重要工具。OpenCV不仅提供基本的图像处理功能,如图像缩放、色彩空间转换等,还包括霍夫圆变换、颜色阈值分析等高级功能,这些都是交通灯检测中不可或缺的技术[4]。
1 计算机视觉
计算机视觉作为一门研究如何使机器“看”世界的科学,近年来已成为人工智能领域中最活跃和最具挑战性的研究方向之一。本领域的研究致力于模拟和实现人类视觉系统的功能,通过从图像或视频中自动提取、处理、分析和理解可视信息来完成各种任务。计算机视觉的应用范围极广,从工业检测、医疗诊断到安防监控,再到最近兴起的自动驾驶和智能交通系统,它的应用几乎遍及人们生活的每一个角落。在计算机视觉领域,图像处理是基础且关键的一环。
图像处理技术包括图像的获取、预处理、特征提取和图像分析等多个阶段。预处理通常涉及噪声去除、对比度增强、尺寸调整等步骤,以提高图像质量并准备后续的分析处理。特征提取则是从处理过的图像中提取有用的信息,如边缘、角点、纹理等。这些特征对于后续的图像识别和分类至关重要。此外,图像分析阶段则包括更高级的处理,如模式识别、机器学习和深度学习技术,用于识别图像中的特定对象或场景。在交通灯颜色检测这一特定应用中,计算机视觉技术的核心在于准确地从车辆前方的连续视频流或静态图像中识别出交通信号灯,并判断其状态。这一过程涉及多个计算机视觉技术的运用。首先,图像预处理技术被用于提高图像质量,确保交通灯的可识别性;然后利用特征提取技术,如霍夫圆变换,被用于定位图像中的交通灯;最后颜色识别技术则用于判断交通灯的颜色状态[5]。
OpenCV 作为一个开源的计算机视觉和机器学习软件库,在交通灯检测领域发挥着重要作用。在OpenCV 库中,包含了从基础的图像处理函数到高级的计算机视觉算法。例如,OpenCV 提供的霍夫圆变换函数可以高效地在图像中检测圆形物体,这对于定位和识别交通灯尤为重要。同样,OpenCV 中的颜色空间转换和颜色阈值功能则可以用于识别不同颜色的交通灯。
2 详细设计与实现
2.1 整体框架
提出的交通灯颜色检测系统基于模块化的设计理念,旨在通过高度组织化的处理流程实现对交通灯状态的准确识别。系统的架构如图1 所示,可以划分为四个层级:接口层、处理层、决策层和输出层。
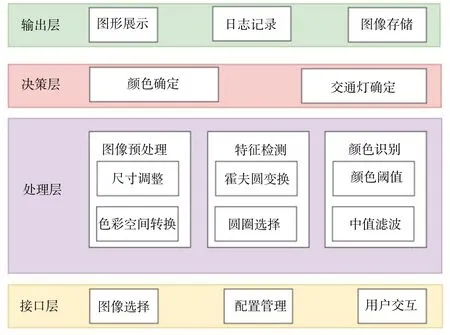
图1 整体框架
(1)接口层
接口层为用户和其他系统提供交互的接口,主要包括图像选择、配置管理和用户交互功能。用户可以通过此层选择待分析的图像,调整系统设置如颜色阈值和图像分辨率,以及通过用户界面与系统交互,实现灵活的操作和实时的反馈。
(2)处理层
处理层是系统的核心,负责图像的预处理、特征检测和颜色识别。这一层首先对输入图像进行如尺寸调整、去噪和对比度增强等预处理操作,然后通过霍夫圆变换等算法识别图像中的交通灯位置,最后根据颜色阈值在HSV 颜色空间中识别交通灯的颜色。
(3)决策层
决策层基于处理层提供的数据来确定交通灯的颜色状态和整体状态。该层分析颜色识别结果,判断最终的颜色状态,进而确定交通灯的当前状态,如红灯、黄灯或绿灯,为后续的行动提供决策依据。
(4)输出层
输出层负责将决策结果呈现给最终用户,并执行数据记录和存储。它在用户界面上展示处理后的图像及其识别结果,记录关键的系统运行信息以便于后续的分析和优化,并将图像及其识别结果存储在数据库或文件系统中,供未来的查询和研究使用。
2.2 设计流程
提出的交通灯颜色检测系统的设计流程如下图所示,体现一种从图像获取到最终状态输出的逐步精细化方法,整个设计流程展示了一种系统化、分步骤的方法来实现交通灯颜色的检测和识别。通过这一流程,系统能够有效地处理从图像获取到最终状态输出的整个过程,确保了检测结果的准确性和系统的可靠性。其中,比较重要的流程步骤包括:
(1)调整大小
加载后的图片接着进行尺寸调整。。这一步骤是为了确保图片符合后续处理流程的要求,例如减少计算量或符合特定的输入尺寸需求。尺寸调整有助于提升处理效率和算法的适应性。
(2)提取关注区域
在灰度图像的基础上,系统利用霍夫圆提取关注区域(ROI)。主要是为了识别和定位图像中可能包含交通灯的区域,从而减少后续处理的计算量和提高识别准确性。
(3)转换HSV 空间
提取出的关注区域随后转换到HSV 颜色空间。HSV(色调、饱和度、明度)空间更适合于颜色分析,因为它能更好地区分不同的颜色,便于实施颜色阈值的应用。
(4)统计非零像素
中值滤波之后,系统会统计滤波后图像中非零像素的数量,用于确定图像中各个颜色区域的大小,是判断主要颜色的基础。
2.3 结果与分析
为了验证提出的交通灯颜色检测系统在实际应用中的有效性和准确性,编写python 程序实现,以Pycharm2023+Anaconda 搭建系统实现环境,其中Anaconda 创建的虚拟环境是以Python3.8 版本为主。
通过分析不同的交通灯图像的HSV 分布情况,以便对图像有更好的理解,对后续的颜色阈值设定具有指导意义。HSV 的结果如图3 所示。从图3 可以看出,不同颜色的HSV 分布具有较为明显的差异,为设计算法提取提供了可行性。
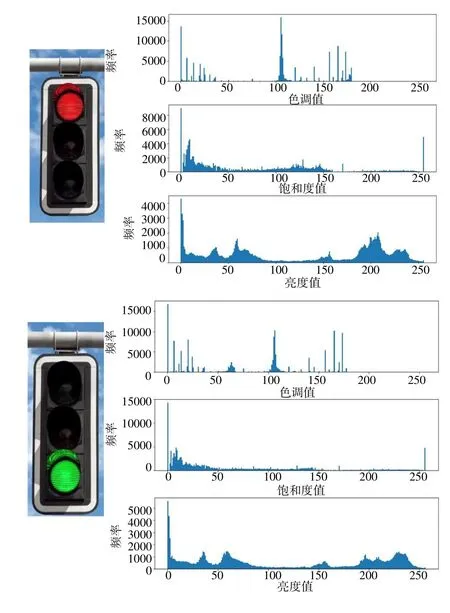
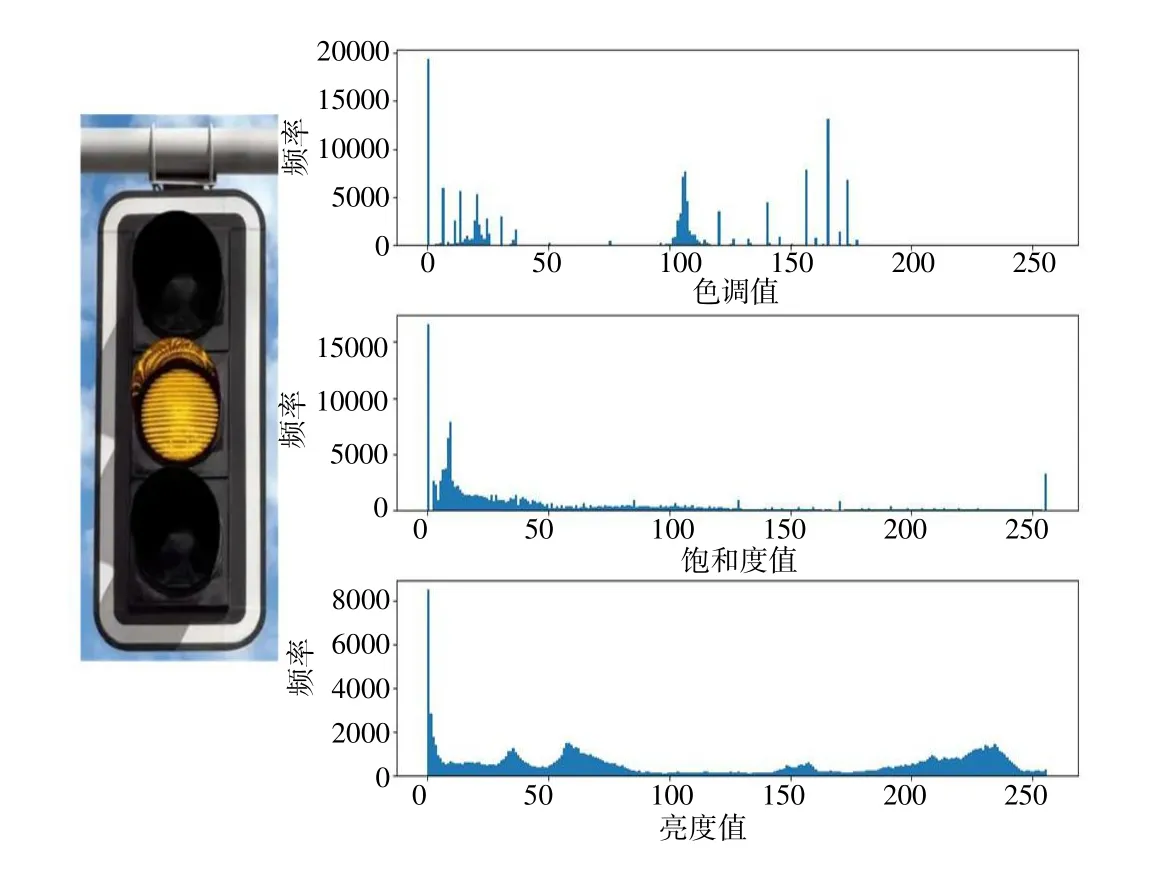
图3 不同颜色的交通灯对应的HSV 分析结果
根据设计好的流程,利用霍夫圆变换识别图像中的交通灯位置,并用圆圈标注出霍夫圆的位置。之后再根据设定的颜色阈值范围来识别霍夫圆内的颜色,最终的识别结果如图4 所示。图中的横纵坐标表示图像的像素,从图中可以看出,算法将每张交通灯的圆形区域都标注出来了,识别结果和图中的实际交通灯颜色一致;此外,还识别了包含方向箭头的红绿灯,从识别结果种可以看出也能正确识别。实验结果表明系统成功地识别出了图像中所有的交通灯,并准确判断了它们的颜色状态。红色、黄色、绿色信号灯以及不同颜色的箭头均被正确识别,证明了提出的基于OpenCV 计算机视觉的方法在交通灯识别的可行性。
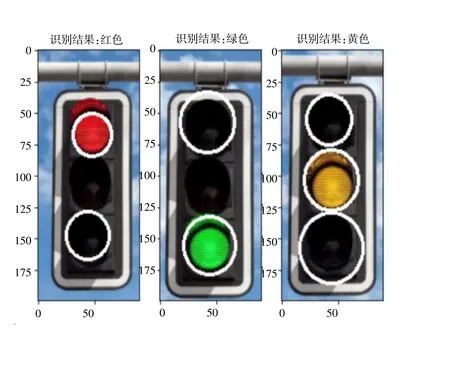
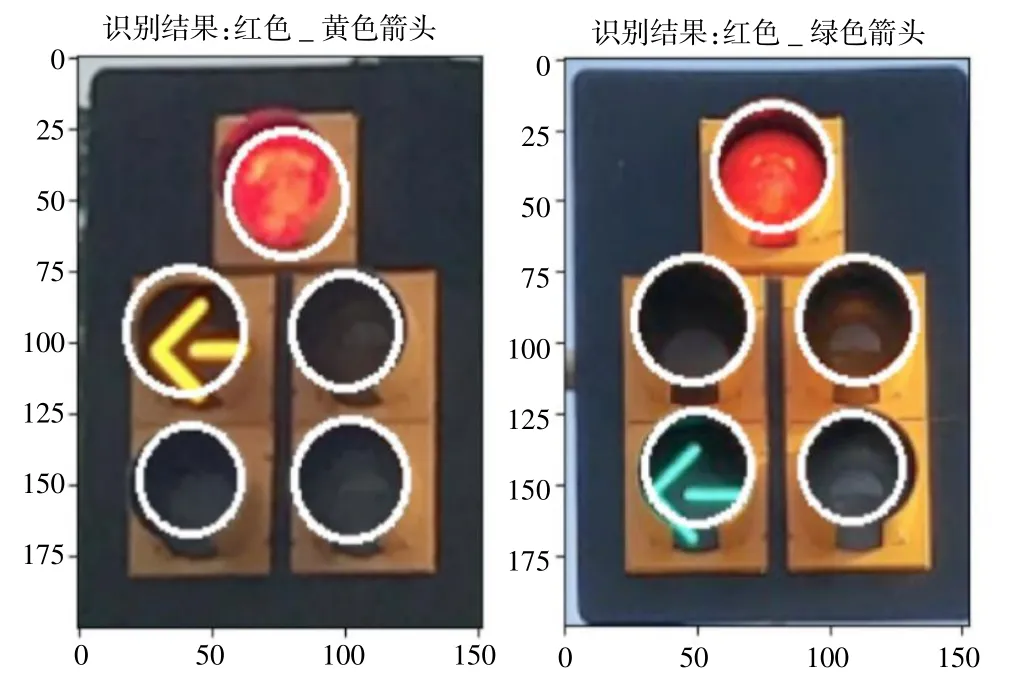
图4 识别结果
3 结语
基于计算机视觉的交通灯识别系统展示了在实际道路场景中对交通灯进行准确识别的潜力。系统通过有效的图像预处理、特征检测、霍夫圆标注、颜色识别和状态判断,实现了对交通灯颜色状态的准确判断。实验结果表明,该系统在实际应用中具有可行性和可靠性。不仅为自动驾驶车辆和智能交通系统中的视觉识别技术提供了有价值的参考,也为未来在更复杂环境下进行交通灯检测的研究奠定了基础。未来工作将包括增加更多样化的图像数据,以及在各种环境条件下进一步测试和优化系统,以提高其普遍适用性和鲁棒性。
猜你喜欢
制造技术与机床(2019年9期)2019-09-10 07:36:54
电子测试(2018年23期)2018-12-29 11:11:34
西南交通大学学报(2018年6期)2018-12-18 02:22:28
河北遥感(2017年2期)2017-08-07 14:49:00
少儿科学周刊·儿童版(2017年2期)2017-03-29 21:38:30
文学少年(有声彩绘)(2017年1期)2017-02-14 11:00:47
衡阳师范学院学报(2016年3期)2016-07-10 07:16:27
电子制作(2016年21期)2016-05-17 03:52:44
少儿科学周刊·儿童版(2015年11期)2015-12-17 03:39:38
儿童绘本(2015年8期)2015-05-25 17:55:54