基于道路特征的车道线识别算法分析及平台搭建
2024-04-18 09:18刘蕾程勇
汽车文摘 2024年4期
刘蕾 程勇

【摘要】基于当前智能驾驶背景下道路特征模型的车道线识别现状,对应用于智能汽车的图像预处理中的灰度化处理算法、滤波处理算法和感兴趣区域提取技术分别进行对比分析,研究不同的图像预处理方法在车道线识别算法的应用适用性。对车道线实时提取算法中的边缘检测技术原理、道路特征条件转化算法进行综合运用分析,搭建基于道路特征的车道线识别算法模型,经过在Visual Studio平台验证,算法模型满足智能驾驶汽车车道线识别要求。
关键词:车道线识别;计算机视觉;边缘检测;阈值分割
中图分类号:U463.6;TP391.41 文献标志码:A DOI: 10.19822/j.cnki.1671-6329.20220259
Analysis and Construction of Lane Recognition Algorithm Based on Road Features
Liu Lei, Cheng Yong
(School of Energy and Power Engineering, Shandong University, Jinan 250061)
【Abstract】 Based on the current status of lane recognition based on road feature model under the background of intelligent driving, the gray processing algorithm, filtering processing algorithm, and region of interest extraction technology in image preprocessing for intelligent vehicles are compared and analyzed respectively, and the applicability of different image preprocessing methods in lane recognition algorithm is studied. The principle of edge detection technology and the conversion algorithm of road feature conditions in the real-time lane extraction algorithm are comprehensively used and analyzed. The lane recognition algorithm model based on road features is built. After verification on the Visual Studio, the algorithm model meets the lane recognition requirements of intelligent driving vehicles.
Key words: Lane recognition, Computer vision, Edge detection, Threshold segmentation
缩略语
LDW Lane Departure Warning System
ACC Adaptive Cruise Control System
BSM Blind Spot Monitoring System
DAS Driver Assistance System
ROI Region Of Interesting
0 引言
车道线识别是指识别道路中的车道线标记并将车道线位置反馈至车辆系统中的一个智能化过程。车道线的正确识别与提取是实现车道线偏离预警系统(Lane Departure Warning System,LDW)、自适应巡航控制(Adaptive Cruise Control System,ACC)和盲点监测系统(Blind Spot Monitoring System,BSM)等驾驶辅助系统(Driver Assistance System,DAS)的基础[1]。
车道线提取方法根据提取方式不同可以分为基于特征提取车道线和基于模型提取车道线2种[2]。基于特征提取车道线的方法主要是利用图像特征来提取车道线,相对于基于模型提取车道线方法,基于特征提取车道线算法简单,计算量相对较小,实时性高且算法稳定,但是容易受到环境因素干扰。邱东等[3]提出了一種基于改进概率霍夫(Hough)变换和线性回归法拟合的车道线检测方法。阎翔等[4]设计了一种采用累计概率霍夫变换计算线段方向和范围的车道线识别技术。姚洪涛等[5]提出了一种针对在复杂道路条件下易发生误检、漏检现象的多阈值过滤改进算法。
道路车道线标志类型不存在显著差异,以白色虚线、白色实线、黄色虚线、黄色实线以及其组合为主。车道线识别具有一定的复杂性,检测结果受车道线类型、路面条件、天气(雨、雾、夜晚)、光线(阴影、灯光、照明)、干扰物(路边树木、路边建筑物)影响。相对于高速公路车道线,城市道路车道线复杂度更高,包括公交车站标线、导向指示线、导流线等专用道路标志线,且存在由于道路长久使用而导致车道线模糊或缺损的特殊状况。因此,为了满足各种路况中车道线识别的精确性要求,在一定程度下应该考虑特殊情况下车道线识别的准确性。即为了满足多种路况需要,车道线识别系统的鲁棒性也十分重要。
在驾驶辅助系统与智能驾驶系统对车道线识别的高标准要求下,目前已有的车道线识别技术在鲁棒性、精确性、实时性等多方面综合平衡上依旧有很大的改进空间。本文分别阐述图像预处理中图像灰度化、图像滤波、图像感兴趣区域(Region Of Interesting, ROI)提取,车道线提取中的边缘检测、阈值分割、形态学处理、Hough变换和直线拟合,从而可以运用不同方法和原理,对算法进行优化,以提高检测的准确度。目前算法初步试验验证效果良好,对于算法的鲁棒性有待后期进行试验验证。
1 图像预处理方法
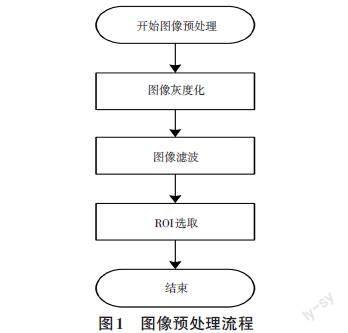
在车道线识别系统中,通过车载记录仪的摄像头拍摄获得的图像直接进行图像处理计算量庞大,且计算过程复杂,所以对车道线图像进行有效的预处理是实现车道线识别的重要环节。图像预处理可以增加目标与背景的对比度,减少外界环境干扰,比如天空、树木阴影、周边车辆、雨雪天气干扰等信息干扰,有助于减少车道线识别系统计算时间,提高计算精确度。图像预处理是目标检测的首要环节,预处理结果直接关系到后续的图像分类、识别以及分割效果。本研究的车道线图像预处理工作主要分为图像灰度化、图像滤波和ROI选取3部分(图1)。
1.1 圖像灰度化
车载摄像头所获得的图像是R(红)、G(绿)、B(蓝)通道彩色图像,其每个像素点都是由R、G、B参数获得。R、G、B分量取值范围为0~255,各有256种数值,一个像素点共有16 777 216种颜色,由此可以看出车载摄像头所获得的彩色图像信息量十分庞大。
直接用RGB彩色图像进行车道线识别计算量大,导致计算效率低、耗时长和实时性不高。所以在车道线识别试验中,多数算法先将彩色图像转换为灰度图像,然后只对灰度图像进行车道线提取。灰度图像本质上是一种特殊的颜色图像,只拥有彩色图像33%的信息量,并且灰度图像可以满足车道线检测的基本要求。
目前常用的图像灰度化处理方法有以下5种[6]:
(1)分量法
分量法是指通过分别获取彩色图像R、G、B通道的像素值,并以其中的一个通道像素值作为灰度化图像的像素值,公式如下:
[gx,y=Rx,y] (1)
[gx,y=Gx,y] (2)
[gx,y=Bx,y] (3)
式中:[x,y]为图像掩膜中任一点的像素值,[gx,y]为灰度化图像的像素值,[Rx,y]为R通道的像素值,[Gx,y]为G通道的像素值,[Bx,y]为B通道的像素值。
(2)最大值法
最大值法是指通过分别获取彩色图像R、G、B通道的像素值,找出3通道像素值的最大值,并将此最大值作为灰度化图像的像素值。公式如下:
[gx,y=maxRx,y,Gx,y,Bx,y] (4)
(3)平均值法
平均值法是指通过分别获取彩色图像R、G、B通道的像素值,3通道的像素值求和后再求取平均值,并将此平均值作为灰度化图像的像素值。公式如下:
[gx,y=Rx,y+Gx,y+Bx,y∕3] (5)
(4)人体生理学加权平均法
人体生理学加权平均法是指通过分别获取彩色图像R、G、B通道的像素值,赋予3通道数值不同权值,且权值和为1。由于人眼对绿色最为敏感,红色次之,对蓝色的敏感性最低。一般当R、G、B通道的权值分别为0.299、0.587、0.114时,所获得的灰度图像更符合人类视觉。公式如下:
[gx,y=0.299Rx,y+0.587Gx,y+0.114Bx,y] (6)
(5)人体心理学加权平均法
人体心理学加权平均法是指通过分别获取彩色图像R、G、B通道的像素值,赋予3通道像素值不同权值,且权值和为1。一般当R、G、B通道的权值分别为0.213、0.715、0.071时,所获得的灰度图像符合人的心理学特点,更符合人体感官中图像的整体色彩分布。公式如下:
[gx,y=0.213Rx,y+0.715Gx,y+0.071Bx,y] (7)
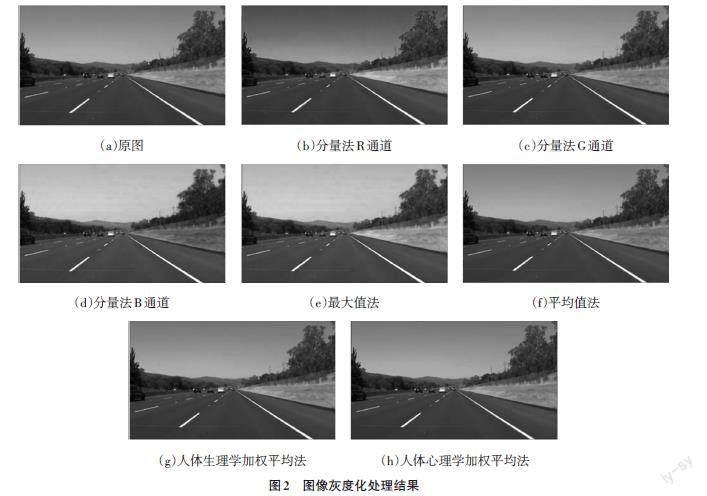
采用以上5种方法,随机选取视频获得第11帧图像,对得到的图像进行灰度化处理,不同灰度化方法处理结果如图2所示。
1.2 图像滤波
对灰度化处理后的图像进行压缩、调整来加快处理速度,并得到图像的像素值。本文中将灰度化处理后的图像尺寸调整为480像素×320像素。
只经过灰度处理的图像中还会存在噪声干扰,包括脉冲噪声和椒盐噪声。所以还需要尽可能保留图像原有的边缘信息和清晰度的同时,通过图像滤波方法滤去噪声干扰。
目前常用的图像滤波类型主要有以下3种方法[7]。
(1)均值滤波法
均值滤波法是指将某一像素点邻近区域的像素值求和并取平均值,所得到的平均值作为该像素点像素值的一种方法。均值滤波是最简单的空间域线性平滑滤波,运行速度较快,公式如下:
[gx,y=f(x,y)m] (8)
式中:[gx,y]为某一像素点处理后得到的像素值,[f(x,y)]为某一像素点邻近区域的像素值求和后得到的像素值,[m]为某一像素点邻近区域内包含该像素点的总像素值。
(2)高斯滤波法
高斯滤波法是指将某一像素点邻近区域的像素值乘以对应权值并求和,除以像素点数所得的像素值作为该像素点像素值的一种方法。高斯滤波是线性平滑滤波,能够很好地降低高斯分布噪声,设高斯分布卷积核为[2k+1×2k+1],则某一像素点像素值公式如下:
[gx,y=12πδ2e- x-k-12+y-k-122δ2] (9)
式中:[gx,y]为某一像素点处理后得到的像素值;[δ]为一个重要参数,[δ]越小说明卷积核中靠近中间位置像素点值的加权越大,高斯滤波的平滑效果越不明显,反之则高斯滤波的平滑效果越明显。
(3)中值滤波法
中值滤波法是指将某一像素点邻近区域的像素值求取均值,作为该像素点像素值的一种方法。中值滤波是一种非线性平滑滤波,能够很好地保留图像边缘信息的同时,降低椒盐噪声对图像处理的阻碍,公式如下:
[gx,y=medianfx-i,y-j, i,j∈ω] (10)
式中:[gx,y]为某一像素点处理后得到的像素值,[fx-i,y-j]为某一像素点邻近区域的像素值,[ω]为卷积核区域。
采用以上3种方法进行滤波处理,随机选取视频第173帧图像,对图像进行灰度化处理并压缩至指定图像尺寸后,进行滤波处理,不同滤波方法的结果如图3所示。
1.3 感兴趣区域选取
基于视觉的车道线识别图像数据由车载记录仪上的摄像头拍摄获得。此时,图像中包含道路两旁的建筑物、树木以及道路上方的天空白云等无用信息。ROI选取是从图像中选择一个区域作为重点对区域图像做算法处理来寻找车道线。通过ROI选择可以很好地提高车道线识别速度和准确度,减少冗余有效信息外的图像数据[8]。因此,在车道线识别前进行ROI选取。
由于在车辆驾驶视频信息中,相邻两帧图像之间的时间间隔较短,下一帧图像中车道线出现的位置与上一帧中车道线的位置具有连贯性,因此许多论文中涉及到ROI预测,根据上一帧图像中车道线出现的位置,预测下一帧车道线将要出现的区域[9-11]。因此,合理预测消失点,建立ROI非常重要。但是,计算消失点是一个复杂的计算过程,对算法准确度提出了较高要求,准确点的获得需要一定的时间分析提取,这严重增加了车道线识别实时性负担。由于车载记录仪上的摄像头位置相对汽车基本稳定,摄像头所获得的图像ROI具有明显规律性,只有图像下方区域信息对车道线识别有用。故本研究采用图像裁剪,选择忽略图像上方区域信息,只保留下方区域信息计算的方式确定ROI。经过ROI处理后的图像可分为两部分进行下一步的车道线提取工作,上部分为干扰信息,将其像素值设为0。下半部分为ROI,在此区域进行车道线识别。
ROI图像宽度尺寸和原始图像宽度尺寸可以设定固定的比例,且仅保留原始图像下方的图像信息。即在车道线识别中,不计算图像复杂的消失点,而是选择根据车载摄像头摆放位置和路况信息合理进行ROI图像宽度尺寸和原始图像宽度尺寸的比例调整。本文设置ROI图像宽度尺寸和原始图像宽度尺寸比例为1/2,随机选取视频第144帧图像,对图像进行ROI处理,结果如图4所示。
2 基于特征的车道线提取方法
车道线的提取是车道线识别的核心部分。本研究综合边缘检测、阈值分割、形态学处理、Hough变换和直线拟合组合,形成了不同算法,并总结了不同算法优缺点,本文选择了以边缘检测和阈值分割技术为主的一种算法,对图像中车道线和干扰因素进行特征分析,对算法进行优化。该方法检测简单、速度快且满足准确度要求,方法实现主要分为可能的车道线与背景区域阈值分割和基于车道线特征的车道线轮廓再提取2部分(见图5)。
2.1 车道区域分割
车道线识别的重要步骤是识别可能的车道线区域。边缘检测技术和阈值分割技术是可以实现的常规方法,但都有其自身的局限性。
2.1.1 邊缘检测技术
边缘检测技术是指标识数字图像中亮度变化明显的边缘点,不断向上构成更高层次特征描述的一种技术。边缘检测一般步骤为滤波、增强和检测。滤波的目的是消除图像中的噪声,常见的滤波方式为高斯滤波。增强的目的是使图像边缘更加明显。检测目的是选择正确的边缘点,常与阈值分割技术结合。边缘检测技术中常用于图像处理的技术有Canny边缘检测技术、Sobel边缘检测技术和Laplace边缘检测技术。具体优缺点如下。
(1)Canny边缘检测技术是使用Canny边缘检测算子的一种算法。Canny边缘检测技术不容易受噪声干扰,能够检测出真正的弱边缘,可以使用2种不同的阈值分别检测强边缘和弱边缘,并且当弱边缘领域内含有强边缘时保留弱边缘像素,否则只保留强边缘像素,可以使边缘尽可能闭合。但是Canny边缘检测技术由于存在高斯滤波,去除噪声的同时会使边缘信息减弱,导致图像区域分割不足[12]。
(2)Sobel边缘检测技术是使用Sobel边缘检测算子的一种算法。Sobel边缘检测技术将图像某一像素的临边像素值加权求差,进而寻找边缘,从而对噪声具有一定的平滑抑制能力,对灰度渐变的图像和噪声较多的图像进行边缘检测技术的图像处理效果较好。但是Sobel边缘检测技术对边缘定位不够准确,得到的边缘较粗,所以不能完全排除检测结果中出现伪边缘的情况。
(3)Laplace边缘检测技术是使用Laplace边缘检测算子的一种算法。Laplace边缘检测技术边缘定位能力更强,锐化效果更好。但是Laplace边缘检测技术对噪声十分敏感,很少用该技术检测边缘,而是用来判断边缘像素是图像明区还是暗区,且由于Laplace算子是不依赖于边缘方向的二阶导数算子,是一个标量,具有旋转不变即各向同性的性质,因此Laplace边缘检测技术不能提供边缘的方向信息。
采用以上3种方法,随机选取视频获得第59帧图像,得到的图像进行边缘检测处理,不同边缘检测方法处理的结果如图6所示。
2.1.2 阈值分割技术
阈值分割技术是一种通过像素值信息提取,把目标从背景中分离出来,以便于图像进一步处理的技术,是基于相对简单的区域的分割技术。阈值分割后的输出图像一般只有255和0两种像素值,所以阈值分割处理又常被称为图像的二值化处理。阈值分割技术根据像素值信息提取前景,简单容易处理,对前景信息与背景信息有较强对比度的图像处理准确度较高,对于复杂图像的处理结果不佳,且容易受噪声影响[13]。阈值分割技术分为全局阈值分割技术和局部阈值分割技术。
(1)全局阈值分割技术是指将某一阈值作为分界线,将大于该阈值的像素值设为255,将小于该阈值的像素值设置为0;或者反过来将大于该阈值的像素值设为0,将小于该阈值的像素值设置为255的一种技术。全局阈值分割技术采用阈值进行图像前后背景分割。该阈值可以为固定阈值,此时全局阈值分割技术细化为全局固定阈值分割技术;该阈值也可以根据图像灰度特性而成为变化阈值,此时全局阈值分割技术细化为自适应阈值分割技术(OTSUAlgorithm,OTSU)。受光照不均匀、反光、背景复杂的影响,图像不同区域的阈值均值有着一定的差异,故而全局阈值分割技术对于存在噪声分布不同、光照分布不同的复杂图像处理结果较差。
(2)局部阈值分割技术是指根据中心像素邻域像素的属性来计算一个或者多个阈值的技术。局部阈值分割技术可以很好地改善因光照不均而导致车道线识别不优的问题,但是图像中除了车道线外部分区域本身的强度差别很大,如车辆车牌与其周边亮度差异、车辆前照灯和尾灯附近区域到阴影区域的亮度差异、道路两旁路障等,这些强度差异导致检测识别噪声。
采用以上2种方法,随机选取视频获得第59帧图像进行OTSU阈值分割技术和局部阈值分割技术处理,不同阈值分割方法的结果如图7所示。
2.1.3 车道区域的分割算法
本研究结合不同边缘检测技术和阈值分割技术原理以及各自优缺点,依据车道线特征进行可能的阈值范围划分,从而对图像进行二值化处理,寻找可能的车道区域,公式如下:
[d1=Ix,y-Ix,y-δ] (11)
[d2=Ix,y-Ix,y+δ] (12)
[D=d1+d2-Ix,y-δ-Ix,y+δ] (13)
[dLow=0.35×Ix,y] (14)
[dTop=1.25×Ix,y] (15)
[Lx,y=255,d1>0&d2>0&D>L&D≥dLow&D≤dTop0,else ] (16)
式中:[Ix,y]为某一像素点的像素值,[δ]为车道线宽度,[Ix,y-δ]为某一像素点左侧距离为[δ]的像素点像素值,[Ix,y+δ]為某一像素点右侧距离为[δ]的像素点像素值,[d1]为某一像素点与距离该像素点左侧距离为[δ]的像素点像素值的差值,[d2]为某一像素点与距离该像素点左侧距离为[δ]的像素点像素值的差值,[D]为判断是否为可能的车道线区域的量,[dLow]为像素值最低值,[dTop]为像素值最高值。
车道线相对于其两侧的亮度更高,只有满足车道线两侧亮度比车道线亮度低一定范围值、亮度差值在给定范围内时,才将此区域检测识别为车道线线段区域。使用大量视频作为样本计算范围值,结果显示,根据输出图像的光照条件,理想情况下,[dLow]可以选择为0.35,[dTop]可以选择为1.35,[D]在此值之外的任何值都属于非车道线部分。若是特殊情况下,如雨天、雾天或夜间行驶,图像的对比度和亮度应做适当调整。
车道线宽度因为视角的不同而随着距离变化,在底部附近最大,而在消失点附近最小。为了更加精确描述车道线可能的区域块,图像中任何一行的车道线宽度可以使用以下公式进行计算:
[δr=ε+σmin+σmax-σmin×r-rvptrtot-rvpt] (17)
式中:[δr]为车道线宽度,[ε]为车道线宽度保持值,[σmin]为给定图像中可能的最小车道线宽度,[σmax]为给定图像中最大车道线宽度,[r]为某像素点的高度值,[rvpt]为消失点的高度值,[rtot]为ROI高度值。
车道线宽度保持值[ε为5]时有助于避免噪声。最大车道线宽度[σmax]取决于图像大小和摄像头的安装位置。如果摄像头保持在很低的位置,与摄像头安装在顶部相比,由于高度上更靠近车道线,底部附近的车道线宽度会更大。默认情况下,可能的最小车道线宽度[σmin]为0,也可根据需要进行动态调整。一旦设置了最大值,可动态地获得不同距离的车道线宽度。对于不同车载摄像机获取的图像,动态更改[σmax]有助于准确选择车道线,本研究中根据压缩后的图像尺寸以及摄像头的安装位置,取[σmax]为0.035倍的图像宽度,[σmax]的取值也符合大部分车载摄像头处于一定的安装位置时获得的图像车道线识别研究。
采用以上算法对图像进行二值化处理,寻找可能的车道区域,随机选取视频的第69帧图像,结果如图8所示。
2.2 车道线提取
进行可能的车道区域分割后,分割区域常常会包含车距提示牌、栏杆、树木、灯柱、周边车辆高亮度边缘、前照灯眩光干扰信息。所以需要对图像进行下一步处理,从可能的车道线区域中进一步处理选择,从而提取车道线。本研究利用车道线的几何特征,进行轮廓分析、面积计算和角度分析,不断进行算法优化,确定最优算法,从而选择有效的车道线段,在车道线段处进行轮廓标记。
本研究首先用Suzuki85算法从二值化图像中选择轮廓线,然后在其周围绘制一个最小面积的外接矩形[14]。OpenCV根据矩形的方向选择长度和宽度,因此需要相应地调整角度来确定其方向,最终方向范围为-90°~90°。其次利用车道线段的特性进行轮廓分析与提取,考虑的车道线段特性主要包括5项约束条件。
(1)面积阈值:车道线的区域大小大于最小区域。本研究中只考虑面积较大的区域,低于设定的最小面积的区域将被去除。本研究中最小区域[minSize]设为0.001倍的图像大小,作为车道线的任何区域的最小区域值的大小。
(2)外接矩形比例:车道线的边的比率大于一定比例。一般情况下长宽比应大于4:1,但是,面积小于某个临界值但是满足最小面积限制的路段可能代表中间断开的车道线标线。为了检测因障碍物或车道线损坏等原因而导致车道线中间断开的线段,边的比例可以降低到1∶1。本研究中,当车道线的最小面积满足大于7倍的最小[minSize]区域,并且区域块大于0.75倍的区域块的最小外接矩形时,若线段的长宽比大于1∶1,将符合条件的轮廓提取出。
(3)方位特征:车道线方向不水平,除图像底部中心区域外不垂直。除非是极端转弯车道线段的特殊情况,否则车道线由于其自身性质永远不会接近水平。去除水平线段,可以删除车辆保险杠、车窗干扰信息。本研究中将区域块的最小外接矩形中角度范围为-20°~20°的矩形去除。垂直车道线段仅在车辆位于车道线行驶时可能存在,此时车道线段靠近图像的底部中心区域。本研究中检测到的在图像下方1/2~1处区域且在图像中部3/7~4/7区域内的车道线段无车道线段垂直条件限制,而其他区域外的最小外接矩形若角度为-90°~-70°和70°~90°,此处的近似垂直车道线轮廓去除。
(4)面积特征:检测到的线段区域受边界矩形限制。车道线非常接近矩形,如果线段区域不接近边界矩形区域,则拒绝此线段。
(5)优先选择判断条件:连续车道线长度较大。若为连续车道线,即实线,则检测到的车道线长度大小一般大于0.3倍的图像高度。该约束条件若成立,则不需要考虑前方5个约束条件,可以帮助提高车道线识别速度。
采用以上约束条件对2.1.3中获得的第69帧图像得到的车道区域图像进行再处理,寻找可以提取的车道线,结果如图9所示。
3 软件系统搭建
车道线识别需要具有鲁棒性。本研究拟在普通適用情况以及特殊驾驶多种情况下进行软件系统验证,软件系统搭建如下。
3.1 拟采用算法的软件系统搭建
本研究拟采用算法的软件系统的搭建如图10所示。本研究算法在对图像处理时,基于传统特征检测法,并进行算法改进,首先将图像转化为灰度化图像,再采取滤波处理减少噪声干扰并尽可能保留图像原有的边缘信息和清晰度,根据实际智能驾驶时采集图像信息特点采用ROI有效减少图像需要处理的信息量。研究中采用改进的图像处理算法对图像进行二值化处理,提取可能的车道线轮廓信息,通过设定面积阈值和直线比例范围排除错误信息,结合Hough直线变换方法识别直线,最终实现了车道线检测。
3.2 传统算法的软件系统搭建
传统算法的软件系统的搭建如图11所示。传统算法通过边缘检测、滤波等方法检测车道线区域,然后结合Hough直线变换、RANSAC算法进行车道线检测,需要人工手动调整滤波器算子,根据算法针对的场景特点手动调节参数,工作量大,鲁棒性较差。而智能驾驶情景中具有驾驶车道线特征较为单一的特点,故传统算法不够优良。
4 结论与展望
车道线识别是实现辅助驾驶和自动驾驶的关键,但是现有的车道线识别依旧存在实时性、准确性和鲁棒性协调不优问题。随着智能车辆需求的不断提升和相关技术快速发展,车道线识别的优化迫在眉睫。本文进行车道线识别算法原理分析,并提出了算法综合优化,将使用OpenCV计算机视觉库和C++编程语言,在VisualStudio上进行车道线识别算法搭建与测试验证。
对于图像预处理部分,主要分为3个模块,分别为灰度化处理、滤波处理和ROI选取。对初始图像进行灰度化处理,从而减少66%的图像信息量,提高图像处理速度。本文通过比较图像灰度化方法中的分量法、最大值法、平均值法、人体生理学加权平均法和人体心理学加权平均法的处理结果分析,选择最优方法进行图像灰度化处理。对灰度化处理完成的图像进行滤波处理,从而去除图像中存在的大部分噪声,减少无用信息对车道线识别的干扰。本文通过比较滤波方法中的均值滤波法、高斯滤波法、中值滤波法的处理结果,对图像进行滤波平滑处理比较。对经过灰度化处理和滤波处理的图像进行ROI选取,从而去除图像上部天空、白云、电线杆的干扰信息,为后面的车道线区域检测打下良好基础。大部分车载摄像头所获得的图像上半部分可作为无用信息去除,可以大幅度地减少对车道线识别干扰,同时提高车道线识别速度。对于车道线提取部分,主要分为两大模块,分别是可能的车道线区域分割和基于特征的车道线提取。根据车道线的宽度、亮度、周边对比度信息,确定图像的区域块,划分为可能的车道线区域,其它区域视为干扰信息不再检测,从而得到二值化图像。本文中车道线宽度根据车道线在图像中的高度位置进行宽度大小变化,使车道线区域块提取更加精确。根据车道线的大小、方向、线段比率特征信息,确定了5项约束条件,对可能的车道线区域块进行二次轮廓选择,最终实现车道线提取。
本文拟采用的算法在原理上具有良好的适应性,不仅可以在普通路况下达到车道线识别的要求,而且在雨天、夜晚的特殊情境下也可以检测,算法可以滤除天空、周边车辆保险杠、部分路障、灯光干扰信息,检测和识别出道路中的复杂车道线,对于连续的实线和虚线识别鲁棒性好,尤其是检测行驶车辆的两侧车道线效果较优,总体上可以较好地满足道路车道线识别的基本要求。本文基于道路特征进行车道线识别方法分析与算法优化,可实时进行道路车道线识别。后续工作将进行大量试验并获取数据进行算法验证,并根据试验结果进行算法优化与调整,对辅助驾驶和智能驾驶技术后续研究开发有一定的借鉴意义。
参 考 文 献
[1] 胡三根. 面向驾驶辅助系统的车辆行驶安全预警模型研究[D]. 广州: 华南理工大学, 2016.
[2] 任凤雷. 基于智能车辆视觉导航的环境感知技术研究[D].长春: 中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2020.
[3]邱东, 翁蒙, 杨宏韬. 基于改进概率霍夫变换的车道线快速检测方法[J]. 计算机技术与发展, 2020, 30(5): 43-48.
[4]阎翔, 谌海云, 蒋钰, 等. 基于计算机视觉的车道线检测与识别[J]. 工业仪表与自动化装置, 2020(1): 118-121.
[5]姚洪涛, 张海萍, 郭智慧. 复杂道路条件下的车道线检测算法[J]. 计算机应用, 2020, 40(S2): 166-172.
[6] 卢贺. 基于机器视觉的前方车辆检测与测距研究[D]. 重庆:重庆交通大学, 2018.
[7] 赵博文, 张力夫, 潘在峰, 等. 基于OpenCV的图像滤波方法比较[J]. 信息与电脑, 2020, 32(15): 78-80.
[8] 赵伟康. 基于单目视觉的车道线检测和车辆检测方法研究[D]. 南京: 南京航空航天大学, 2018.
[9] HUANG Z N, QIN H B, LIU Q. Vehicle ROI Extraction Based on Area Estimation Gaussian Mixture Model[J]. IEEE International Conference on Cybernetics IEEE, 2017.
[10] OZGUNAL P, UMAR F, RUI A, et al. Multiple Lane Detection Algorithm Based on Novel Dense Vanishing Point Estimation[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(5): 621-632.
[11] 钱基德, 陈斌, 钱基业, 等. 基于感兴趣区域模型的车道线快速检测算法[J]. 电子科技大学学报, 2018, 47(3): 356-361.
[12] 郭志彪, 段为. 基于OpenCV的边缘检测技术研究[J].现代计算机(专业版), 2017(15): 29-32.
[13] 黄鹏, 郑淇, 梁超. 图像分割方法综述[J]. 武汉大学学报(理学版), 2020, 66(6): 519-531.
[14] SUZUKI S, ABE K. Topological Structural Analysis of Digitized Binary Images by Border Following[J]. Computer Vision, Graphics, and Image Processing, 1985, 29(3): 32-46.
(責任编辑 明慧)
【作者介绍】
刘蕾 (1999—),女,山东大学,硕士研究生,研究方向为新能源汽车智能驾驶技术。
E-mail:202114442@mail.sdu.edu.cn
程勇(1963—),男,山东大学,博士,教授,研究方向为新能源汽车智能驾驶技术。
E-mail:cysgd@sdu.edu.cn
猜你喜欢
计算机应用(2016年12期)2017-01-13
中国新通信(2016年22期)2017-01-13
无线互联科技(2016年13期)2017-01-10
现代电子技术(2016年22期)2016-12-26
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年27期)2016-12-15
中国科技纵横(2016年17期)2016-11-30
软件导刊(2016年9期)2016-11-07
科技视界(2016年9期)2016-04-26