
基于PHM技术的EOAS健康管理和故障预测系统研究
2024-04-16 09:20王少华
铁道通信信号 2024年4期
程 亮,王少华
高铁因其安全、快速、准时的特性,成为了现代社会不可或缺的出行方式,我国全路每天运行3 000 多列动车组。动车组司机操控信息分析系统(EMU Engineer Operation Analysis System,EOAS)车载设备作为动车组重要行车设备,其运用状态直接影响车辆运用效率,然而现有维护手段已逐渐无法满足高标准、严要求的车载设备运用保障要求。
故障预测与健康管理(Prognostics Health Management,PHM)是为了满足设备自主保障、自主诊断提出的重要理念,相关技术的发展也较为成熟,因此在EOAS 系统的维护管理中引入PHM技术,建立安全状态诊断和预测系统,提升EOAS设备的可靠性,对提高设备维修维护效率、降低成本起到了关键作用[1]。
1 现存问题
随着EOAS 车载设备数量的快速增长,以及部分EOAS 车载设备逐渐进入维修周期,仅依靠人力和机务故障报修系统进行设备维护,其及时性、有效性显然无法保证,具体表现在以下几方面[2]。
1)无法及时准确掌握故障。电务部门作为电务车载设备的维护单位,主要通过机务故障报修系统获取车载设备故障信息,而机务故障报修系统存在着大量的重复报修、无效报修,无法准确有效地反映出EOAS 车载设备的故障状态,并且人工筛选有效信息,时间上相对滞后,不能及时掌握设备的故障状态,无法有效开展设备维护。
2)缺乏音视频设备监测手段。EOAS 司机室摄像头、前置摄像头、拾音器、线路相机等音视频设备的状态检测依赖于二级修和故障修时人工上车检测,在单个检修周期内不能及时发现设备异常,所以无法便捷、有效地进行音视频设备监测。
3)缺乏转储装置维护手段。随着动车组开行频次的增加,EOAS 转储装置的插卡频次越来越高,造成较高的设备损耗,导致在报修故障中出现的转储装置接触类问题日渐增多,但目前缺乏转储装置运用趋势分析和故障预判手段。
2 设计目标
为解决电务检修人员无法及时掌握EOAS 设备故障、缺乏故障检测和预判手段等痛点问题,基于PHM 技术,通过开发专用检测设备,运用图像识别和大数据分析,研制基于PHM 技术的EOAS健康管理和故障预测系统(以下简称“系统”),系统设计目标如下。
1)设备状态实时监测与故障分析。系统应具备EOAS 车载设备各插板、转储装置等部件工作状态的实时采集、监测功能,并结合机务部门提报的报修单信息,进行数据综合分析,生成故障报警。
2)视频设备自动检测。系统应对EOAS 车载司机室摄像头、前置摄像头、线路摄像机等设备的拍摄图案进行抓图展示,自动识别出摄像头图案的黑屏、白屏、花屏状态,并基于图像识别算法进行图像异常检测,同时生成报警,提高检测效率。
3)设备检修闭环管理。对既有EOAS 车载设备转储装置进行硬件优化:支持挂卡槽插卡次数计数,便于及时掌握挂卡槽的损耗情况;支持无线传输通信功能,利用专用的车载设备检修手持终端进行无接触式EOAS 车载设备检测、拍照、检修记录回传以及自动回执报修单,实现设备检修作业的闭环管理。
4) 设备故障趋势分析。结合实时采集的EOAS 设备状态数据以及上车检修过程的检测数据,通过大数据分析,实现关键部件的性能判断和趋势预判[3]。
3 系统实现
3.1 物理架构
系统总体架构见图1,由路局健康管理服务器、电务车间工区数据处理存储工作站、用户终端、数据转储装置、手持检测终端等组成[4]。

图1 系统总体架构
1)路局健康管理服务器包括应用服务器和数据库,部署在路局机房,主要实现EOAS 车载设备状态数据、机务报修单数据的采集抽取、预处理、数据存储、挖掘分析,同时进行系统基础数据维护、操作权限控制,实现电务工区数据存储工作站与用户终端的交互功能。
2)电务工区数据存储工作站部署在电务车间工区,主要实现音视频检测数据、检修计划数据、设备检修结果数据的存储和调阅。
3)用户终端包括健康管理终端和视频设备监测终端,部署在电务车间工区。其中,健康管理终端用于访问系统采集的监测数据、报警数据和检修作业数据;视频设备检测终端用于访问车载各摄像头视频图片数据和图像异常报警数据。
4)手持终端用于电务检修工区人员上车进行EOAS设备检测、检修和数据下载。
3.2 软件架构
系统的软件设计采用B/S 架构,自下而上划分为数据采集层、数据存储层、数据分析层、健康管理运用层4层[5],软件架构见图2。

图2 软件架构
1)数据采集层。通过系统间数据自动接入和人工录入等方式,获取系统所需的车载设备状态、音视频数据、报修单数据、EOAS交路数据等。数据采集层适配了不同类型的采集接口,通过车地传输通道发送至地面设备;通过接入机务故障报修系统,定时采集机务提报的报修数据,包括报修车号、故障时间、故障类型等信息;通过标准化模板支持检修任务单数据的导入。
2)数据存储层。将采集数据根据业务运用特性,进行格式分类、组织,形成符合要求的数据,并按类别存储。对于调阅频繁的热数据,使用非关系型数据库Redis 存储;对于分析后的结果数据采用关系型数据库存储。
3)数据分析层。采用多种分析模型和PHM分析结构对各类数据进行挖掘及应用。对车载设备状态数据、机务报修单数据,通过关联规则、多维分析、模型可视化的方式进行处理,能够将车载设备的原始状态信息与报修单中的设备故障匹配,呈现设备故障的规律和趋势。
4)健康管理运用层。按照运用业务划分为不同的功能模块,在既有列控车载动态监测及传输系统(Dynamic Monitoring System,DMS)客户端软件上进行健康管理功能模块开发,并通过DMS 客户端访问系统,方便电务管理和设备维护人员的使用。
4 系统功能
系统主要具备故障报警自动分析、音视频设备检测、实时监测设备状态、设备检修闭环管理、故障预测分析等功能[4],见图3。

图3 系统功能
4.1 故障报警自动分析
系统通过列控车载动态监测及传输系统的车地实时传输通道,采集EOAS车载主机CPU板、EOASCOMM 插板、DUMP 插板、WTD/DRWTD 插板、CIR 插板、转储装置、司机室摄像头、前置摄像头、线路摄像机、拾音器等设备状态以及板卡间的通信状态,结合动车组的行车场景,自动对设备状态数据进行设备故障判断、分析,形成实时故障报警[6]。同时系统从EOAS 故障报修系统同步机务部门提报的EOAS 报修单,将报修单内车载设备故障结合实时设备检测状态进行关联分析。把机务提报的问题主要分为设备故障、外部数据异常、数据逻辑处理3 类。其中,设备故障需由电务检修人员使用手持终端,按计划车载设备故障处理,任务下发时系统会给出故障处置建议,可为检修人员提供参考;外部数据异常一般为接口设备类问题,可反馈至相关设备维护单位协同处理;数据逻辑处理为EOAS设备车、地软件类问题,电务检修人员无需上车进行硬件设备故障处理。
4.2 音视频设备检测
系统通过列控车载动态监测及传输系统周期性采集各类摄像机图像,并把图像数据传输至健康管理服务器。系统采用图像识别技术对图像黑屏、白屏、花屏等进行自动识别并报警[7]。电务工作人员可通过视频设备监测终端筛选日期、车号、摄像头类型等条件,查询到图像报警列表详情以及报警频次。系统支持图像异常时刻和最新图像同屏对比显示,便于工作人员分析判断。
4.3 设备状态实时监测
系统能够查看EOAS 车载主机设备各板卡和音视频设备的实时状态,并以示意图形式动态展示,便于维护人员及时、直观地掌握各设备的工作状态,为及时安排故障设备检修作业提供依据。
4.4 设备检修闭环管理
系统可生成车载设备类故障检修计划,及检修问题的排查建议,维护工区工作人员通过手持终端按设备检修流程进行任务领取和上车检修,作业完成后通过手持终端将检修数回传,实现检修作业闭环管理。
手持终端采用便携式设计,内置专用无线模块及APP 软件,在司机室附近,可以自动连接升级版EOAS 车载转储装置的内置专用无线网络,实现无接触式设备检测、数据下载等功能。
4.5 故障预测分析
利用EOAS 实时监测所采集的状态数据、机务故障报修数据及无接触检测终端采集的检测数据,根据故障类别、故障所属范围(动车组车端、动车所、电务段)等维度,进行设备故障数据的统计和趋势分析。
1)设备故障统计。统计设定时间段内各部门配属车辆的EOAS 设备故障情况,根据设备故障类型查看分布情况,并支持按照车端故障数量统计排序。
2)故障增长率统计。可对一段时间内的车载设备类故障按照最近12 月的月度环比增长率进行分析和比较,并统计最近2 年的月度同比增长率,方便管理人员掌握车载设备故障的整体发展趋势。
3)作业情况统计。可统计设定时间段内车载设备类故障的处置情况,方便管理人员及时掌握故障的检修维护处理情况。
4)故障趋势预判。结合EOAS 各插板、部件状态和使用情况,通过大数据计算,对EOAS 转储装置卡槽寿命到期进行预警。并且系统可对EOAS车载设备故障进行趋势分析,识别故障频次较高车端、故障频率较高类型,提前进行故障预警[8]。
5 关键技术
5.1 图像识别技术
利用图像识别技术,对司机室摄像机、前置摄像机、线路摄像机等的图像进行识别和异常报警。基于Sobel 算子的边缘检测,对图像模糊度进行计算,同时结合阈值和逻辑判断进行图像黑屏、白屏、花屏的识别[9]。
Sobel 算子作为一种在图像处理中广泛使用的边缘检测算法,通过计算图像灰度函数在横向和纵向上的梯度大小来检测图像的边缘。边缘是图像中灰度值快速变化的区域,这些变化通常对应于物体与背景之间、不同物体之间或物体结构的细节。对图像中边缘线的检测是图像分割与特征提取的基础,通过计算像素灰度值的变化速度,可以确定该像素是否位于边缘上。
Sobel算子使用横向和纵向两个方向的卷积核,分别计算像素灰度值在横向和纵向上的梯度大小,根据梯度大小反映了该像素所处位置的边缘强度。将图像中每个像素的梯度大小与预先设定的阈值进行比较,确定该像素是否位于边缘上。在实际应用中,通常使用一些逻辑判断方法来确定图像的边缘。例如,将相邻像素的梯度大小进行比较,如果相差较大,则认为它们构成边缘,否则不构成边缘[10]。
原图像素点的横向梯度Gx为
原图像素点的纵向梯度Gy为
式中:A为原始图像。
通过Gx和Gy可以得到图像的整体梯度幅值G为
式3可以简化为
根据式4,计算出每个像素点的G值,最后对整个图像的全部G值求和作为整张图像的模糊度M。M值越大,说明图像的边缘信息越少,图像越模糊;M值越小,说明图像的边缘信息越多,图像越清晰。系统识别的黑屏、白屏和花屏均为模糊度较高的图像。将样本图像分为正常和非正常两大类,分别计算出两类图像的M均值M1和M2,将M1和M2作为两类的分界线,可区分出正常图像和非正常图像,再根据非正常图像的RGB 值可进一步分辨出黑屏、白屏和花屏。
系统周期性采集摄像机视频图片,利用配置了GPU 运算能力的服务器进行辅助图像识别,识别结果显示在视频设备检测终端。如图4 所示根据当前登录用户所在组织的配属车辆信息进行默认车辆展示,如果用户设置有关注车辆,则默认显示关注车辆的当天抓图信息,否则按照左侧车辆列表展示最新3 个车端数据。左侧车号列表颜色显示规则:最近24 h 存在抓图信息的标注绿色,超过30 天无图片信息的标注红色。如图5 所示,系统可有效识别黑屏、白屏、花屏异常,形成报警数据,并按照车号、时间、相机类型、报警类型、运行端进行关联查询。

图4 图像抓拍识别
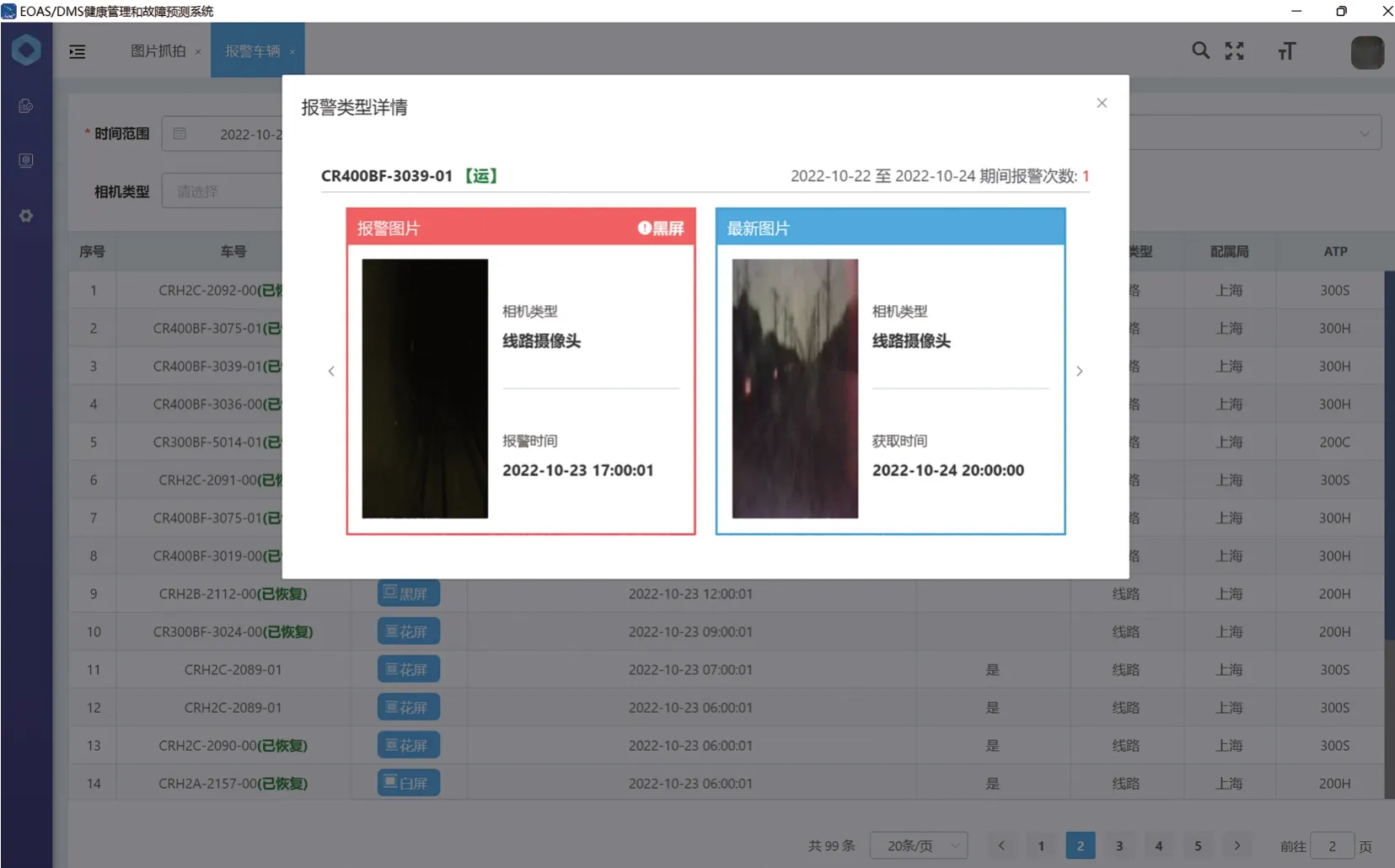
图5 报警车辆
5.2 风险矩阵分析法
系统采用风险矩阵分析法定量计算风险项的风险值,评估EOAS 设备故障的安全风险等级。风险矩阵法是一种常用的风险评估方法,它通过比较项目的各个风险因素,从而确定各因素的风险等级,最后计算得出项目的总风险值。基于此,科学划分风险等级,分析风险发生的可能性与严重程度的关系,权衡风险可接受尺度,流程如下。
Step 1识别风险。首先,需要识别出可能造成事故后果的风险因素:整机风险、板卡风险、模块风险、人员风险、操作风险等。
Step 2确定风险级别。风险等级从高到低划分为重大安全风险、较大安全风险、中等安全风险、一般安全风险,分别用红、橙、黄、蓝4 种颜色标示。
Step 3评估事故发生的概率。对于每个风险因素,评估其发生的概率,采用5 种等级标识:很可能、可能但不经常、可能性很小/完全意外、很不可能/可以设想、极不可能。
Step 4定量计算风险值。建立风险矩阵,计算每个风险因素的风险值。矩阵的行表示风险的概率,列表示风险的严重程度。
Step 5计算总风险值。将所有风险因素按照其风险值进行排序,可使用加权平均等方法计算所有风险的数值总和,即为项目的总风险值。
6 系统应用
系统于2022 年12 月在南京电务段南京动车所投入应用。系统支持对列控车载动态监测及传输系统车载设备的检测,可一机多用,故仅需购置一套系统即可替代传统检修方式中电务检修车间分别采购的EOAS 综合测试台和DMS 综合测试台,兼顾了对EOAS、DMS 车载设备的检测,采购成本可减少约50%。同时,利用系统具备的实时监测、自动诊断等功能,检修人员远程操控即可完成设备的功能检测,取代了传统人工携带检测工装上车的方式,提高了检测效率,降低人工作业成本和检测耗时。
7 结论
基于PHM 技术的EOAS 健康管理和故障预测系统提升了电务部门对EOAS 车载设备维护效能,进一步丰富了EOAS车载设备检维手段,为EOAS车载设备状态监测提供了解决方案,可以有效提高设备异常情况从发现到处置的及时性、准确性,助力保障设备运行的可靠性和安全性。接下来,将继续挖掘既有数据利用深度,通过AI 学习训练,建立更多种不同故障类型的故障模型,提升系统诊断与预判的精准度和及时性。
猜你喜欢
铁道通信信号(2020年8期)2020-02-06
当代工人(2019年24期)2019-01-17
铁道通信信号(2018年6期)2018-08-29
铁道通信信号(2018年5期)2018-06-28
上海铁道增刊(2017年3期)2018-01-22
上海铁道增刊(2017年2期)2017-04-18
中国公共安全(2017年11期)2017-02-06
电子制作(2016年19期)2016-08-24
设备管理与维修(2016年5期)2016-03-16
电源技术(2015年2期)2015-08-22
