
一种机载组网雷达协同目标检测算法
2024-04-11 01:35李洁玉丛潇雨郭山红盛卫星
现代雷达 2024年2期
李洁玉,丛潇雨,郭山红,盛卫星
(南京理工大学 电子工程与光电技术学院, 江苏 南京 210094)
0 引 言
机载雷达是作战飞机获取周边空域情报信息的重要手段。与单一机载雷达相比,多机协同的机载组网雷达在目标探测、反电子侦察以及抗干扰能力等方面具备较大的优势[1-2],主要表现在以下几个方面:一是多站雷达能够利用空间分集增益有效发现微弱目标,甚至是涂有吸波材料的隐形目标;二是多站雷达能够通过对发射机、接收机在空间上的合理选址,有效降低被敌方侦察或截获的概率;三是多站雷达能够采用多体制部署、多波形发射以及信号信息融合等技术,有效提高雷达系统的抗干扰性能[3-5]。
组网雷达协同探测的基础是雷达回波信号的空时配准。传统的空时配准算法[6-9]利用预知的雷达空间信息进行回波信号配准,包括位置、姿态、波束指向等先验知识。但机载雷达在飞行过程中很难给出精准的空间信息,因而难以适用。我们在前期的工作中提出了一种无需先验空间信息和时延的空时配准算法[10]。根据组网雷达在低检测门限下分别测得的目标轨迹,建立统一坐标系下的空时配准最小误差函数,采用空间时间交替迭代的方式估计出配准参数,实现空时配准。
对机载组网雷达来说,空时配准难免会存在配准误差。当存在空时配准误差时,传统非相参体制的检测器无法有效积累目标信号能量,使协同探测失效。针对存在空间配准误差的情况,文献[11]提出了一种信噪比(SNR)已知条件下的信号融合检测算法,文献[12]提出了一种基于极大似然估计的广义似然比(ML-GLRT)检测器和一种基于最大后验估计的广义似然比(MAP-GLRT)检测器。ML-GLRT检测器提高了存在配准误差的信号联合检测稳健性,MAP-GLRT检测器利用了空间配准误差的先验信息可以达到更好的检测性能。但以上这些方法的联合检测性能受空间配准精度的影响较大,配准误差越大,联合目标检测的性能越差。
本文提出了一种配准与检测联合的机载组网雷达协同目标检测算法,通过迭代计算同时提高组网雷达的空间配准精度和联合检测性能。该算法首先利用各机载雷达低检测门限下的轨迹域数据估计得到初始配准参数,然后利用初始配准参数对当前相参积累周期(CPI)内的回波信号进行配准和信号融合联合恒虚警检测,信号级融合检测通过非相参能量积累提高了对目标的检测概率,再用目标新轨迹点信息更新计算配准参数,提高配准精度;下一个CPI信号再在减小了配准误差的情况下进行联合恒虚警检测,进一步降低虚警率;通过这样的迭代计算实现配准精度和目标联合检测性能的双提升。数值仿真实验验证了本文提出方法的有效性。
1 机载组网雷达配准与检测模型
考虑一个如图1所示的机载组网雷达架构,它由N部空间位置分散的机载雷达构成,每部雷达自发自收,为避免串扰,不同雷达的发射信号在时域、频域或码域中至少一个域上相互正交[13]。组网内的各部雷达可以单独探测目标,也可以通过相互之间的数据链交互数据,进行组网协同探测。组网协同探测时,雷达i会接收到与之空间位置邻近的多部雷达的数据,并在本地以非相参积累的方式完成对目标的信号融合。

图1 机载组网雷达协同探测架构
所有雷达是在各自的本地坐标系下对目标进行探测,各部雷达在本地完成MTD处理后将部分数据传送至雷达i,雷达i需要将其他各部雷达在各自坐标系下测量的距离-多普勒域数据转换到雷达i的本地坐标系中,进行组网雷达的距离-多普勒域数据配准,配准完成后再进行后续联合处理。
首先利用各机载雷达在低检测门限下测量得到的一组目标点迹作为先验信息,进行配准参数的初始化估计。而雷达的定位和姿态角度信息不准确,目标距离、速度和角度的测量误差等因素都会造成配准误差,导致各部雷达的回波信号配准后目标峰值不在同一个距离-多普勒单元,且与目标所处的真实距离-多普勒单元存在一定偏差。图2给出了N部机载雷达存在配准误差时的回波数据观测模型,其中黑色单元格表示目标真实单元,斜线单元格表示各部雷达的目标待测单元。为方便讨论,这里假设雷达在距离-多普勒域配准后的配准误差区域大小为M个单元。

图2 存在距离-多普勒配准误差时的局部观测模型
2 无需先验空间信息的轨迹域空间配准算法[10]

(1)
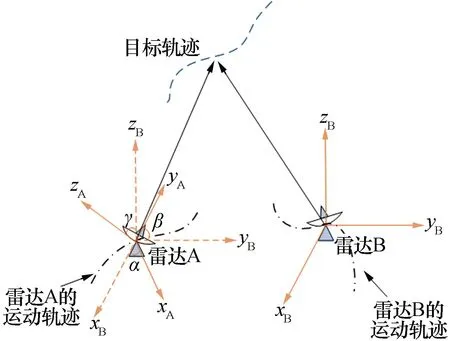
图3 组网雷达空间配准模型
式中:旋转矩阵H包含α、β、γ三个自由度,α、β、γ表示将雷达B笛卡尔坐标系的x,y,z轴分量分别向雷达A笛卡尔坐标系的x,y,z轴方向旋转的角度,H可以表示为
H=
(2)
r=[rx,ry,rz]T是3×1的平移向量。

(3)
将球坐标系转换到笛卡尔坐标系定义为g(·),并将雷达B的测量值配准到公共坐标系中,单目标场景的空间配准可以建模为如下优化问题
(4)
使得目标函数最小化的(H,r)即为最优的配准参数。


(5)

(6)
式中:A=[a1,a2,…,aK];B=[b1,b2,…,bK]。
令S=BAT,并对S进行奇异值分解得到S=UΣVT,根据文献[10]可知,Jt(H)最大时可得到H的通解
(7)
输入雷达A、雷达B测得的目标轨迹,根据以上奇异值分解的方法估计出旋转矩阵H和平移向量r,结合式(1)、式(3)可以得到雷达B回波信号距离维的配准模型
(8)

多普勒域的配准模型可以表示为
(9)

3 机载组网雷达协同目标检测算法
3.1 算法架构
本文以ML-GLRT检测器为基础,提出了一种配准与检测联合的机载组网雷达协同目标检测算法,算法流程如图4所示。首先利用各机载雷达在低检测门限下测得的一组轨迹域数据估计得到初始的旋转矩阵H和平移向量r,然后利用初始配准参数对当前CPI部分信号进行距离维和多普勒维的配准;由于存在配准误差,配准后各个雷达对同一目标的探测结果会散布在一个区域内,称配准误差区域M,然后对配准误差区域内的各雷达分辨单元的信号做非相参积累和联合恒虚警检测,信号级融合检测通过非相参能量积累提高了目标所在分辨单元的SNR,也提高了对目标的检测概率;由于基于轨迹的组网配准中,漏检和虚警是影响配准精度的主要因素,用联合检测得到的目标新轨迹点信息更新计算配准参数,可以提高配准精度,进而减小配准误差区域M的大小;将更新后的配准参数用于下一个CPI信号的配准,下一个CPI信号再在减小了配准误差的情况下进行联合恒虚警检测,进一步降低虚警率,不断重复上述步骤直到估计得到的配准误差区域大小M≤2,达到空间配准精度要求,输出目标探测结果。
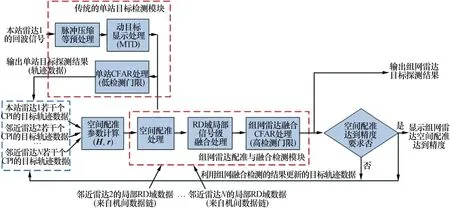
图4 机载雷达1利用邻近雷达数据协同目标检测处理框架
在信号级融合的联合目标检测中,随着配准精度的提高,配准误差区域不断缩小,目标联合检测的虚警概率也随之不断降低。
3.2 ML-GLRT检测器设计
假定组网系统由N部机载雷达构成,记第i部雷达的观测量为xi(i=1,2,…,N),将第i部雷达误差区域中的M个距离-多普勒单元的观测数据置于一个向量中,即
xi=[xi(-M1),…,xi(0),…,xi(M2)],
i=1,2,…,N
(10)
式中:xi(0)表示待检测单元中的采样数据,并且满足M1+M2+1=M。记目标位置索引集合为M={-M1,…,0,…,M2},假设目标就存在于误差区域中的某一个距离-多普勒单元中。
各部雷达在配准误差条件下目标检测的二元假设检验可以写成
H0∶xi(m)=wi(m)
(11)
(12)

在H0和H1假设条件下,第i部雷达观测集合xi(i=1,2,…,N)的条件概率密度函数可以分别写成
(13)
假设N部雷达的观测信号是统计独立的,因此在H0和H1假设条件下,所有观测数据的联合概率密度函数可以写为xi的条件概率密度函数乘积的形式。因此ML-GLRT检测器的形式可以写为
(14)
根据文献[12]可知,对fx(x|a,m,σ2,H1)取对数再分别对ai、mi求导后令导数式等于0,即可求得使fx(x|a,m,σ2,H1)最大的ai、mi的估计值
(15)
(16)
(17)
观察式(17)可知全局检验统计量由各部雷达局部对数似然比ψi累加得到。



[(1+n)ψ+K]K+1
(18)
在H1假设下,参照同样的概率论知识可以得到ψi的条件概率密度函数为
(19)
式中:λi表示第i部雷达的SNR大小。
3.3 算法流程
在组网雷达协同探测场景中,实际上需要进行距离、多普勒和波束指向角三个维度的配准,而这三个维度的配准过程是相似的。本文在假定多普勒和波束指向角已经实现了配准的基础上,给出多站雷达距离配准与信号融合联合检测的迭代过程。以两部雷达A和B为例,设雷达A为本地雷达,设空间配准所需的轨迹点数为15个CPI,配准与检测联合的机载组网雷达协同目标检测算法流程总结如下:
输入:雷达A、雷达B在第1~15个CPI测量得到的目标空间轨迹:χA、χB,置i=1;
输出:M≤2时的目标探测结果。
(1) 利用两部雷达第1~15个CPI测量得到的目标轨迹,根据式(5)和式(7)得到初始旋转矩阵H和平移向量r;
(2) 雷达A接收雷达B在目标所在区域(大小为M)的新一个CPI的RD域数据,并根据式(8)和式(9)所示距离维和多普勒维配准模型用H和r配准雷达B的回波信号;
(3) 根据配准处理后雷达A,B探测目标的分布情况,确定配准误差区域大小M;
(4) 对配准后的数据进行信号级非相参积累处理,用ML-GLRT检测器做联合恒虚警检测,根据式(17)进行联合判决,得到组网雷达信号融合后目标探测的结果,并输出;
(5) 根据M的大小判断空间配准是否达到精度要求,若是,则输出显示组网雷达空时配准达到精度要求;
(6) 用组网融合检测的结果更新目标轨迹信息,用第i+1~i+15个CPI时的目标轨迹信息更新χA、χB,并通过式(5)和式(7)更新配准参数H和r;
(7)i=i+1,回到步骤(2),继续进行下一个CPI信号的配准和检测。
4 算法的数字仿真验证与性能评估
4.1 存在配准误差时的ML-GLRT检测器性能验证
考虑一个由四部雷达组成的探测网络,即N=4。它们在大地坐标系下的空间位置坐标依次为PA=[-42.1, 19.4, -14.5],PB=[-42.3, 21.2, 22.3],PC=[-47.2, 20.5, 26.5],PD=[-45.3, 18.2, 25.3],目标空间位置为PT=[10,0,30],单位均为km,目标初始速度为vt=[300, 0, 0] m/s,以加速度at=[0, 150, 100] m/s2做曲线运动。假设各部雷达的SNR相同,噪声功率估计所需要的参考单元数K为16,全局虚警概率Pfa=10-4,所有仿真的检测门限均通过蒙特卡洛试验得到。图5和图6中横坐标为单个通道的SNR,纵坐标为融合后的检测概率。
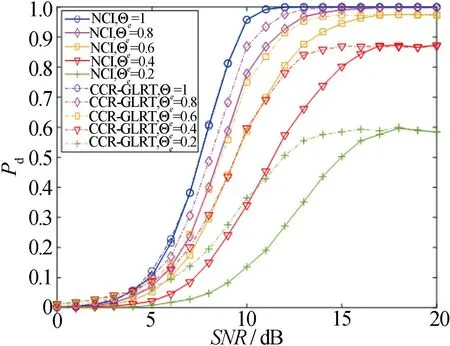
图5 NCI检测器和CCR-GLRT检测器在不同配准

图6 ML-GLRT检测器在不同误差区域大小下的检测性能
为了与ML-GLRT检测器对比,首先仿真传统非相参(NCI)检测器和基于累计贡献率的广义似然比(CCR-GLRT)检测器在距离-多普勒域存在配准误差时的检测性能。NCI检测器的全局检验统计量可以写为如下形式
(20)
CCR-GLRT检测器首先对各局部检验统计量ψi进行升序排列,设置CCR门限因子η(η∈[0.7,1]),用式(21)估计出有效的通道数m
(21)
其中
(22)
CCR-GLRT检测器仅对有效通道的数据进行融合检测,因此全局检验统计量可以写为如下形式
(23)
为分析距离-多普勒域配准误差对传统NCI检测器和CCR-GLRT检测器的性能影响,引入配准状态θi重新定义各部雷达目标检测的二元假设检验模型
(24)
式中:θi∈{0,1},i=1,2,…,N。θi=0表示第i部雷达的距离-多普勒域信号在配准后与目标真实位置未对齐,θi=1则表示对齐。θi的概率分布可以表示为
(25)
式中:Θe∈[0,1],Θe表示各部雷达配准后目标信号位置对齐的概率;Θe=1表示不存在配准误差,即各部雷达目标位置完全对齐。
图5为传统的NCI检测器和CCR-GLRT检测器在配准概率Θe=[0.2, 0.4, 0.6, 0.8, 1]情况下的检测性能。从图中可以看出,Θe=1时两种检测器都可以得到最佳的检测性能,随着Θe逐渐减小,检测性能均急剧下降。说明在存在配准误差的情况下,传统NCI检测器仅对各部雷达的待检测单元xi(0)的数据进行融合检测,会导致含有期望目标的信号与不含期望目标的信号相融合,从而降低空间分集增益。与NCI检测器相比,CCR-GLRT检测器在配准概率下降时能获得一部分已完成配准的有效通道的融合增益,但被剔除的通道的目标信息并没有得到有效利用,总体检测性能提升有限。
图6为ML-GLRT检测器的在不同误差区域大小下的检测性能。M分别设为1、9、16和25,其中M=1表示不存在配准误差,即各部雷达目标位置完全对齐,此时可得到最佳检测性能。从图中可以看出,随着误差区域大小M的逐渐增大,检测概率缓慢降低,说明该检测器在有配准误差时仍然可以有效积累目标信号能量,并且对误差区域的扩展具备一定的稳健性。
4.2 雷达组网场景下协同目标检测性能验证
仿真场景设置同4.1节,假设四部雷达的SNR均为9 dB,以雷达A的坐标系为配准的公共坐标系。这里通过计算每个CPI估计得到的配准参数的均方根误差RMSEH、RMSEr来衡量配准效果。设置首次融合检测时的距离维配准误差区域大小M=25,本节所有仿真结果均通过对300次蒙特卡洛实验结果取均值后获得,图7、图8和图9的横坐标迭代次数表示融合开始后的CPI序号。
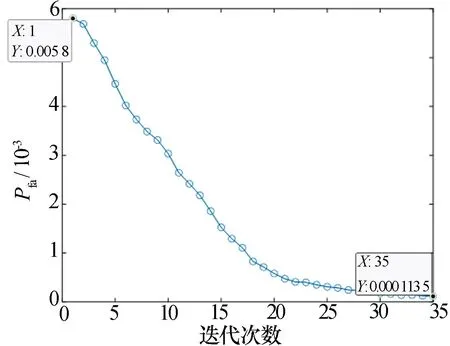
图7 四站融合的虚警概率随迭代次数的变化趋势

图8 配准参数估计值的均方根误差随迭代次数的变化趋势
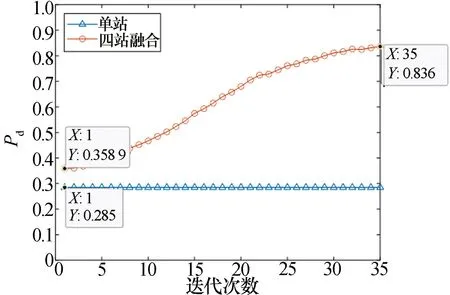
图9 四站融合的检测概率随迭代次数变化趋势
由式(2)可知,旋转矩阵H包含α、β、γ三个自由度,假设真实的旋转矩阵H的自由度为α′、β′、γ′,则均方根误差可以表示为
(26)

(27)
图7给出了SNR为9 dB时,将每次迭代的目标检测概率维持在80%,四站融合的虚警概率Pfa随迭代次数的变化趋势。从图中可以看出,融合刚开始时由于配准误差较大,为达到较高的检测概率,检测门限设置较低导致虚警率较高,但此时的虚警率仍低于相同SNR和检测概率条件下的单站检测虚警率;随着迭代的进行,配准误差减小使得相同检测概率条件下虚警率逐渐降低,在30次迭代后下降趋势逐渐趋平,达到1.13×10-4,接近1×10-4。
图8给出了固定检测概率条件下雷达B、C、D配准参数的均方根误差随迭代次数的变化趋势。图8a)、图8b)分别给出了旋转矩阵H和平移向量r在每个CPI相对于真实配准参数的均方根误差,明显可以看出,随着迭代的进行,旋转矩阵H和平移向量r的均方根误差呈现不断减小的趋势,这表明配准参数的估计越来越准确,已经逐渐接近真实值。
图9给出了SNR为9 dB、Pfa为10-4时四站融合的检测概率随迭代次数的变化趋势。随着迭代的进行,由于配准精度的提高,配准误差区域逐渐减小,固定虚警概率条件下检测门限逐渐减小,融合检测概率不断提升,由第1次融合检测时的35.89%上升至第35次迭代时的83.67%,远高于单站雷达在相同条件下的检测概率。
值得说明的是,通过蒙特卡洛仿真得到在固定Pd为80%,SNR为9 dB条件下,四站雷达以非相参方式融合检测,在M=1时仿真得到的虚警概率约为9×10-5。固定Pfa为10-4,SNR为9 dB条件下,四站融合检测在M=1时仿真得到的检测概率约为85.1%。而图7和图9给出的虚警概率和检测概率在35次迭代后并没有完全达到最优值,是由于在多次蒙特卡洛实验中,存在若干次实验在35次迭代后估计得到的配准误差区域大小M的值等于2,而通过分析仿真数据,估计值M=2时各部雷达距离-多普勒域信号实际上也已基本配准,因此在得到估计值M=2时,也选择将此时的检测结果作为可靠数据输出。
此外,表1给出了文中所提到算法的运算复杂度。传统的NCI检测器的运算复杂度最低,而CCR-GLRT检测器由于需要对局部检验统计量进行排序并估计有效通道数目,运算复杂度有所提高,ML-GLRT检测器由于需要进行未知目标位置的估计,运算复杂度要高于前两种算法,本文所提算法在用ML-GLRT检测器检测前需要进行局部距离-多普勒域的空间配准,迭代次数与初始误差区域大小M相关,设迭代次数为ω,通过对比可知本文所提算法与其他检测器相比运算复杂度较高,但高得并不多,通过采用高性能的数字信号处理器或现场可编程门阵列是可以实现实时处理的,关键是本文算法具有其他算法不具备的配准精度和检测性能方面的提升。

表1 四种算法的运算复杂度分析
5 结束语
本文提出了一种机载组网雷达协同目标检测算法,通过雷达间少量距离-多普勒域数据和低检测门限下目标轨迹数据的交互,采用一种无需先验空间信息的空间配准算法对组网雷达的距离-多普勒域数据进行空间配准,利用ML-GLRT检测器对目标进行信号级融合联合恒虚警检测,通过轨迹域空间配准与联合恒虚警检测的迭代计算,在提升组网雷达空间配准精度的同时,提高了对目标联合检测性能。现有仿真计算是在单目标场景下进行,对多目标的协同目标检测理论上也是可行的,相关的研究工作尚在进行中。
猜你喜欢
兵工学报(2022年11期)2022-12-01
物联网技术(2019年9期)2019-11-06
科学与财富(2017年24期)2017-09-06
中国交通信息化(2017年9期)2017-06-06
设备管理与维修(2017年1期)2017-04-11
工业设计(2016年11期)2016-04-16
电子器件(2015年5期)2015-12-29
机械与电子(2014年2期)2014-02-28
河南科技(2014年22期)2014-02-27
电子设计工程(2014年8期)2014-02-27
