基于作战规则的电子对抗设备行为模型表征方法
2024-04-07 11:57俞忠武马晓斌张江南
航天电子对抗 2024年1期
罗 晟,王 鑫,俞忠武,马晓斌,张江南
(1.中国航天科工集团8511研究所,江苏 南京 210007;2.空军装备部驻南京地区第二军事代表室,江苏 南京 210016)
0 引言
随着电子信息技术的快速发展,各类电子对抗设备持续涌现,武器系统面临的电磁环境呈现出对抗性强、变化速度快等特点,使得利用实装或半实物方式模拟复杂战场电磁环境来检验系统性能愈加困难,因此近年来数字仿真技术成为了模拟复杂电磁环境的重要手段。然而,由于当前电子对抗设备实体模型仅模拟了技术性能,受物理机理建模的限制,其往往不具备灵活动态的反应能力[1]。同时,电子对抗设备模型能否根据战场态势和作战任务作出正确的战术行为选择,直接影响着结果。受模型设计人员知识结构、逻辑经验的影响,目前基于模糊理论和神经网络设计的行为模型很难作出切合实际作战的决策判断,需依据对相关规程和设备使用具有指导意义的电磁频谱领域作战条令体系进行建模[2-5]。因此,本文将基于外军作战条令条例和设备性能参数,通过对外军作战规则的研究,深入理解设备行为架构,同时考虑到实体构成及其使用流程,开展电子对抗设备行为模型的研究,为设备战术战法运用理论联系实际的现实问题提供参考思路。
1 行为模型定义
“行为”一词原本的含义是在一定条件下,不同的个人、动物或群体表现出来的特征,或对内外环境因素刺激所作出的能动反映。由此推演到“电子对抗设备的行为”,可以将其定义为电子对抗设备在电磁作战空间中表现出来的电磁行为及具体的运用方式。它是在一定电磁环境下,不同的电子对抗设备表现出来的基本特征,或对内外环境因素刺激所作出的电磁能反应。
根据福格的行为模型可以得到:
式中,B为行为,M为动机,A为能力,T为触发条件。当个体具备了一定的动机和能力且被触发的情况下,就会产生一次行为[6]。
针对电子对抗设备,行为动机主要指设备所执行的任务,能力是指设备实体的战技能力,触发条件主要是指外部电磁环境和设备收到的控制指令。除此之外,电子对抗设备的行为还需要作战规则和策略的驱动,因此,基于福格行为模型,本文提出电子对抗设备行为模型表征方法:
式中,Be为电子对抗设备行为;Me为电子对抗设备行为动机/任务;Ae为电子对抗设备的战技能力;Te为电子对抗设备行为环境触发条件;Re为电子对抗设备行为规则或策略。其中,Ae主要由实体模型实现,因此本文将重点研究Me、Te、Re3 个量。
2 行为模型表征指标
基于电子对抗设备行为模型的定义,按照设备作战流程可以将其行为特征描述为任务集选择(Me)、触发条件值计算(Te)、规则库匹配(Re),以及实体模型的功能组件调用(Ae)实现规则库中设定好的基本行为组合。设备行为决策流程如图1 所示。

图1 设备行为决策流程
根据设备行为决策流程的模块划分,总体建模思路为将电子对抗设备行为决策流程进行分层映射:在作战任务选择模块根据条令解析电磁作战任务的概念;在触发条件模块根据设备的半自动工作模式设计威胁等级计算公式和指令控制接口;在规则库匹配模块对基本行为动作进行算法研究。最后用计算机编程语言对上述的选择逻辑、映射关系和行为算法进行表述,形成理论对应实际、模型框架合理的建模方法。
2.1 电磁作战任务分析
一般条令体系框架从纵向来看分为顶层条令、中间层条令和底层条令,其中底层条令将部队的基础职能结合具体任务和行动进一步分解,介绍了各项作战任务的相关内容[7]。以《JP3-85 Joint Electromagnetic Spectrum Operations 联合电磁频谱作战条令》为例,首先明确设备能够执行的作战任务,不同的任务将会对应关注不同的环境要素,输出不同的行为结果[8]。
1)电磁支援行动(ES)
作为电磁战规划和部署的基础,电磁支援行动主要通过搜索、侦察、监视、识别和定位各种电磁辐射源,结合其他情报信息为电磁及火力攻击提供更精确的电磁作战环境图景。电子对抗设备在电磁支援行动中主要提供的是电子技术侦察和威胁信号分选识别功能,如:舰载电子战系统一般具备射频警戒、监视、精确测量和自动威胁识别功能,可以在导弹武器来袭时对导引头发出的雷达信号进行时域、频域、空域、能量域检测,完成对截获的威胁目标信号的参数测量,并将结果上报至上级指挥实体,为作战决策提供支持。
本文提出基于最小生成树的K-Means算法划分脑区或ROI。利用隐马尔科夫模型揭示了大脑不同网络之间的转换不是完全随机发生的,这种非随机的大脑网络序列本身是有层次结构的,呈现出两个不同的亚稳态网络系统。基于SVD算法计算出网络内聚力的大小,全面分析当前大脑状态动力学的有关研究。
2)电磁攻击行动(EA)
电磁攻击行动分为进攻性电磁攻击和防御性电磁攻击。其中,进攻性电磁攻击包括:防区外压制干扰、随队支援干扰、电磁欺骗、电磁入侵、空射诱饵、定向能和高能武器(激光、射频武器、高功率微波和电磁脉冲)、赛博空间打击以及导航战等主动措施;防御性电磁攻击包括:利用自卫干扰、无源诱饵干扰和定向能红外对抗等保护人员、设施、能力和设备。在导弹武器攻防对抗过程中,电子对抗设备主要负责软杀伤部分,如:电子战飞机所搭载的电子干扰系统可采用噪声干扰样式对敌各类雷达实施电磁攻击。
3)电磁防护行动(EP)
电磁防护行动是确保在不利的电磁辐射影响下能够保护人员、设施和设备免受友方或敌方使用电磁频谱影响,持续有效使用依赖EMS 的系统,同时也可以防止敌方探测、中断、欺骗、破坏。在防空反导作战体系中,各种远程预警探测、对空对海搜索雷达大多采用虚警控制、旁瓣对消、频率捷变和数字动目标显示等抗干扰措施来实施电磁防护行动,可有效降低敌电子侦察截获概率和电子干扰效果。
根据外军条令体系框架分析获取电磁作战任务树,如图2 所示。作为电子对抗设备行为模型建模的初始建模要素,形成任务集。设备首先需从任务集中选择接收到的作战任务,从而确定之后的行动范围。
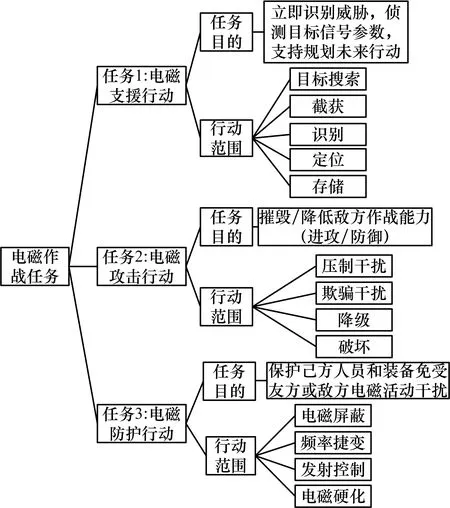
图2 作战任务树
2.2 触发条件分析
设备实体在t时刻所选择的行为可以设定为此刻战场环境的一个映射函数,它根据接收到的任务Task将其关注的外部环境信息E和内部状态信息S映射为具体的数值,体现为实体在行为集Act中采取某种行为的可能性。仿真实体的行为选择逻辑Φ 可表示为:
Φ:(Task,E(t),S(t))∈R→A∈Act(3)
在每个仿真周期的开始阶段,实体需要对接收到的输入信息进行更新,然后根据主动处理数据还是被动接收指令,将触发条件分为外部电磁环境威胁等级值计算以及实体内部接收指控对行为修正2 个环节。
在电磁对抗场景中,电子对抗设备对目标威胁等级的更新过程主要取决于其所关注的外部环境特征参数,如:当前环境电磁态势、目标距离与速度、目标的工作体制及参数等。因此,威胁等级值可以用环境特征值的一个多元函数来表示,组合方式为加权累加,对于设备行为的触发可以将威胁等级作为输入。设威胁等级D的取值依赖于环境参数f1,f2,…,具体的依赖程度用函数adj(·)来调整,同时考虑到除了外部环境,来袭目标的威胁等级还与实体自身的战损情况fe有关系,可将函数表示如下:
2)内部指挥控制触发条件
在交互行为方面,结合《JP3-01 Countering Air and Missile Threats 应对空中和导弹威胁》、《JP3-51 Joint Doctrine for Electronic Warfare 电子战联合条令》、《JP3-85 Joint Electromagnetic Spectrum Operations 联合电磁频谱作战》等条令相关内容以及公开情报资料,可以发现上级指控系统对设备还存在着指控关系,因此可以在设备上保留一个优先级更高的接口,用以模拟上级指控系统在设备自主运行的基础上进行指令干预的情况,在模型设计方面可以设定为由指令触发的中断机制。
2.3 作战规则分析
对于作战规则库的建模首先需要从外军作战条令中提取基本行为,再根据具体的作战规则和任务执行过程,按照时序与资源约束关系将基本行为进行复合[9-10]。
电子对抗设备的基本行为包括:
1)侦察。根据《ATP3-12.3 Electromagnetic Warfare Techniques 电磁战技术》,设备进行侦察动作能够获得的目标威胁特征参数包括:威胁方使用的电磁频谱资源、天线方向、极化方式、发射功率、作用距离、位置、带宽、调制类型、脉冲重复频率等。电子对抗设备的侦察行为建模可以简化为一个判断过程,若信号达到侦收的阈值,即可获得上述威胁目标的所有参数并解算出其他信息,然后将数据实时传递给指挥决策中心。
2)干扰。已明确的干扰技术包括:频点干扰、扫频干扰、阻塞干扰、跟踪干扰等,具体采用的干扰样式要根据能力参数确定。假设舷外有源干扰设备的作战行动流程为:从电子支援系统接收操作员的指令和威胁数据后,发射处理器根据威胁目标来袭方向和距离、舰艇航向、海面风力等信息进行诱饵最佳布放位置综合解算,得出最佳发射方位角和俯仰角。设备向指定位置发射有源雷达诱饵并根据导引头工作频率范围、脉冲宽度、重复周期对原始信号进行调制,施放拖引式假目标欺骗干扰或密集假目标压制干扰信号[11]。
3)协同。电子对抗设备之间还存在的交互关系,假设舰载电子战系统与先进舷外电子战系统的协同干扰为:在协同工作模式下,舰载电子战系统负责探测反舰导弹威胁,其软杀伤协同系统通过Link-16 数据链向舷外发送协同干扰指令以及威胁目标引导参数,协同实施电子攻击。此外,该电子战系统还可通过外部接口与其他和主平台连接的电子对抗设备配合工作,以最大化电子攻击效应,实现对反舰导弹的协同电子对抗。舰载电子战系统与先进舷外电子战系统的协同干扰交互关系如图3 所示。
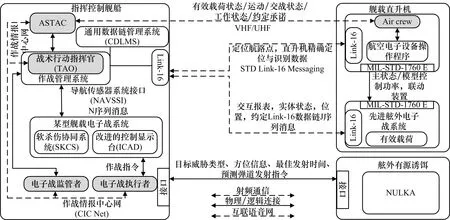
图3 舰载电子战系统与先进舷外电子战系统的协同干扰交互关系
3 仿真结果分析
3.1 行为模型构建
为验证本文提出的电子对抗设备行为模型建模的可行性,通过构建大型舰船编队防空反导作战场景,开发某典型舰载有源干扰设备的行为模型,并在电磁对抗仿真系统中加载该行为模型来验证其设备实体的自主决策能力。通过综合分析该场景下反舰导弹接收的信号特征和探测结果,验证基于作战规则的电子对抗设备行为模型的准确性。
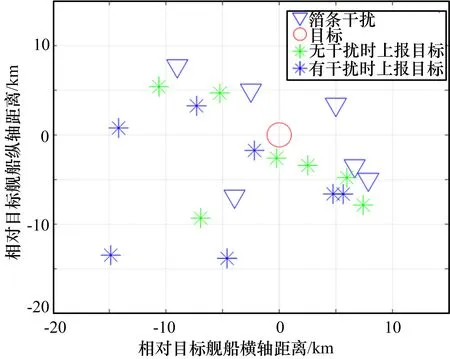
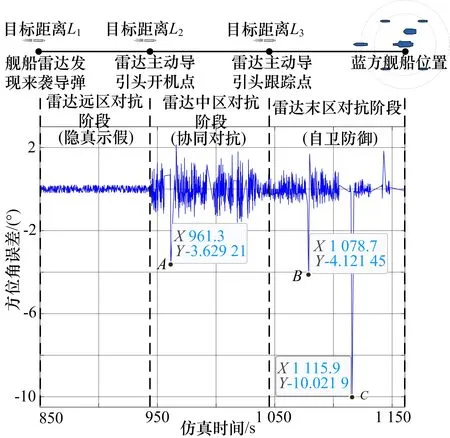
仿真试验场景想定:当大型舰船编队面临反舰导弹武器打击时,舰载电子战系统将执行防御性电磁攻击行动。在侦察预警体系的支撑下,该型舰载有源干扰设备根据获取到的威胁目标工作参数、位置信息和打击意图计算其威胁等级,查询规则库条目执行对应设备行为,通过与编队舷外有源干扰设备、无源干扰设备等手段进行配合,开展电子对抗行动,具体过程如图4 所示。将电子对抗行动分为远区对抗、中区对抗和末区对抗3 个阶段,对应来袭威胁导弹威胁等级阈值value1、value2和value3,设定valuei为设备在各雷达对抗阶段作战规则转换判断的依据,且value1 图4 舰载电子战系统行为模型工作流程图 1)当环境威胁等级值D≤value1时,进入远区对抗阶段,为降低大型舰船编队被探测到的概率,该型舰载有源干扰设备控制箔条发射系统向舰船艏艉提前发射冲淡式箔条干扰,降低舰船在导引头开机后被搜索锁定的概率。 2)当value1 3)当value2 通过开展全数字仿真试验,该舰载有源干扰设备的行为模型按照想定的工作过程执行了各阶段的具体行动。根据实时采集的导引头视角下的目标位置信息,绘制得到仿真结果图,通过分析其受到的干扰效果,验证电子对抗设备行为的有效性,如图5 和图6所示。其中,图5 为反舰导弹主动雷达导引头开机后的目标位置信息上报图,图6 为导引头在3 个对抗阶段的角度跟踪精度。 图5 导引头目标位置上报图 图6 目标方位角测角误差 1)当环境威胁等级值D≤value1时,舰载有源干扰设备按照想定在反舰导弹主动雷达导引头开机前控制箔条发射系统发射了冲淡式箔条干扰。 2)当value1 3)当value2 实验结果证明,电子对抗设备在其行为模型的指控调度下采取了相应的策略,释放了既定的干扰,输出了合理的规划结果,贴合实际行为及规程。 本文针对电子对抗设备行为模型建模问题,分析了电子对抗设备行为的定义,解析了电子对抗设备行为模型构建基本要素,基于对外军作战条令的研究,梳理其底层作战规则,提出了基于作战规则的电子对抗设备行为模型表征方法,为电子对抗设备行为模拟提供了解决思路。同时,本文分析了电子对抗设备模型对外界环境特征做出反应时需要考虑的参数,并根据其影响因子赋予一定的权重来计算威胁等级值,作为对整个战场情况的评级,再通过该值映射到实体采取的行为。同时保留了优先级更高的指控命令交互接口,解决了之前决策前判断的单一性,大大提高了行为输出的合理性与真实性。未来将以此为基础对条令条例进行更深的研究和解析,继续丰富和完善行为模型的建模方法,期望为电子对抗设备行为建模提供理论方法借鉴。■
3.2 仿真试验结果分析
4 结束语
猜你喜欢
航天电子对抗(2023年1期)2023-10-05航天电子对抗(2019年4期)2019-06-02航天电子对抗(2019年4期)2019-06-02电子制作(2017年23期)2017-02-02制导与引信(2016年3期)2016-03-20火控雷达技术(2016年1期)2016-02-06弹箭与制导学报(2015年1期)2015-03-11弹箭与制导学报(2015年1期)2015-03-11军事历史(1991年3期)1991-08-16军事历史(1991年3期)1991-01-18