基于点云数据的变电站三维建模方法研究
2024-04-07 02:24郑文杰崔其会
山东电力技术 2024年3期
郑文杰,乔 木,杨 袆,崔其会
(1.国网山东省电力公司电力科学研究院,山东 济南 250003;2.国网山东省电力公司,山东 济南 250001)
0 引言
变电站是维持电力系统运行的关键,其能否安全稳定运行至关重要[1]。但变电站内部错综复杂分布的电缆、荷载及各类设备,给变电站后期维护带来极大挑战,亟须寻找一种快捷有效的方法。同时,随着电量需求的日益增加,运维工作愈发复杂、繁重,人员和技术都需要进一步提升[2]。大数据背景下,电力系统趋于信息化、智能化和自动化发展,操作、监测与运维管理也更加可视化、仿真化、精细化和健康化。基于此,十分有必要研发变电站智能检测及自动运维技术。可视化、仿真化和精细化操作的三维数字技术不仅能够建立真实准确的变电站三维数字模型,还能够提供仿真培训与现场辅助分析,降低工作难度,减少维修时间[3],是一种契合新型变电站需求的有效技术,引起人们的关注。如何构建信息真实、画面精良、高适应性的变电站三维仿真模型成为研究的热点。
随着变电站三维建模要求的不断提高,具有每秒扫描数千点并测量距离的同时记录点表面和位置信息以及计算机直观呈现采集数据优势的三维激光扫描技术替代了以往常用的虚拟现实建模语言(virtual reality modeling language,VRML)[4]、模型几何特征[5]、地面激光雷达测距[6]等建模方法,被广泛应用到各个行业[7-8]。在电力领域中,文献[9]利用三维激光扫描技术测得变电站点云数据,通过3DMax 软件实现了三维建模。文献[10]运用三维激光点云数据搭建了变电站模型,提取了设备模型。文献[9-10]在处理点云数据时需要人工分辨场景,无法快速自动化建模,还需要进一步深入研究。
现阶段基于三维激光点云数据的变电站三维建模的过程是先预处理原始点云数据,再进行分割获得独立点云数据模型,然后将其与标准模型库进行匹配,最后把标准模型库中的模型放置于场景之中获得场景模型。此过程涉及数据压缩、背景除噪、设备分割识别、模型匹配和特征提取技术。但变电站设备数量众多、结构复杂,点云数据具有数量大、分布不均和噪声多的特征,传统处理方法存在噪声残留、设备分割难度大和模型匹配率低的难题,导致变电站建模难度大、周期长、成本高。为解决上述难题,实现变电站快速建模,深入研究点云数据建模关键技术,基于数据特点,提出一种三维激光设备获取点云数据的自动化、短周期、低成本的快速建模方案,提高模型可移植性和适用性,推动电力变电站系统智能化。
1 点云数据采集与处理
1.1 点云数据采集
运用三维激光扫描设备采集物体信息,如图1所示。通过激光传感器、旋转平台和数码相机分别获取距离、反射强度与角度和颜色信息。利用光的传播和反射性质,计算激光照射到物体表面后再返回的耗时,再根据光速[11]测出距离,如式(1)所示。
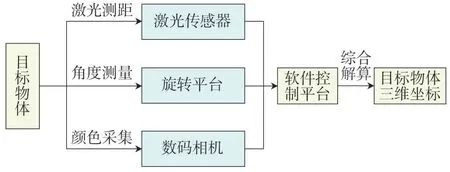
图1 三维激光扫描数据采集Fig.1 3D laser scanning data acquisition diagram
式中:c为光速;Δt为脉冲信号发出与接收的时间间隔。
以扫描仪为原点,为保证变电站场景记录完整,设置三维激光扫描仪为高密度扫描,利用水平旋转角度和俯仰角度测得角度。
根据距离和角度,通过式(2)计算测点的三维坐标pi=(xi,yi,zi),得到点云数据。
式中:α为扫描仪水平旋转角度;θ为扫描仪俯仰角度。
1.2 点云数据处理
高密度扫描采集了包含地面、高压线和噪点等无用数据的点云数据集,庞大的数据增加了处理难度和时间。为提高设备工作效率,对数据进行地面和顶部高压线的冗余、压缩和去噪预处理,以剔除无用数据。
1.2.1 顶部与地面切除
地面点云数据不仅对建模没有帮助,还会影响数据处理速度,应进行地面分割。通过概率统计方法对地面进行切割,得出变电站场景中各高度区间内点云数据概率为
式中:bins为区间点数;N为点云数据总数;ΔZ为区间宽度。
考虑变电站地面起伏,对变电站进行大小为5 m×5 m 的网格化处理,以概率最大高度表示地面高度,得到每个网格的地面高度,以地面高度为基础进行网格处理与合并,获取地面分离后的变电站数据。地面切割后,删除高于地面上15 m 高度的点云,获得切除地面和顶部变电站点云数据。
1.2.2 点云数据压缩
变电站中不同类型和大小的设备及建筑物的数据密度不一,统一标准压缩点云数据时,高压缩比无法获取密度低部分的完整外观,低压缩比不仅不能实现数据的有效压缩,而且对处理器的要求还高,压缩比和压缩效果均无法平衡。基于此,运用自适应密度体素滤波算法(adaptive density voxel filtering algorithm,ADVFA)[12],避免出现由于点云数据分布不均匀造成过多细节误删、高密度压缩不足的难题。
将点集分为高、低密度两类,以点邻域密度为标签,采用不同压缩比例,完成变电站点云数据的高压缩比、高质量压缩。具体步骤如下。
1)变电站点云数据集为X={pi=(xi,yi,zi)|i=1,2,…,M},计算点到最近点的平均距离为
式中:di为平均距离;di,j为欧式距离。
若di服从正态分布N(μ,σ2),计算全局平均距离、标准差σ和密度阈值T为
式中:n为标准差密度。
2)将阈值范围内和范围外的点分别放入高密度点 集Dh={Xi|di≤T} 和低密度点集Dl={Xi|di≤T}。
3)设置高、低密度点集网格,将点空间对应相应网格。
4)以网格中点重心Xc代替其他点,合并剩余点,得到压缩后变电站点云数据。
1.2.3 去噪处理
三维激光设备扫描的变电站点云数据中包含了许多高密度、形状各异的噪声[13],会影响电气设备的提取结果,应提前进行除噪处理。传统去噪方法有密度、聚类和统计3 种方法,这些方法在处理分布不均、密度不同的数据时,需要选择不同的参数及统一邻域范围和阈值,导致去噪效果不佳,存在高密度背景噪声残留问题。
具有非预设聚类、高鲁棒性和抗噪性的基于密度的空间聚类算法(density-based spatial clustering of applications with noise,DBSCAN)能够避免传统方法的不足。其核心思想为:以密度特征为点簇分类标准,判断点周围密度区分区域密度,对低密度区域的点记为离群点,抑制离散噪声影响,获得不同高度的点云数据集的聚类结果。同时,针对类似于设备点集密度不能区分出的噪声,根据其原理进一步采用能够通过引入高度和平面的纵向约束层次聚类方法区分噪声和设备点云,获得精准的去噪结果。整体流程如图2 所示,详细步骤如下:

图2 基于DBSCAN聚类和纵向约束层次聚类去噪算法流程Fig.2 Flowchart of denoising algorithm based on DBSCAN clustering and vertical constraint hierarchy clustering
1)根据设定的高度分层包含平面特征和高度特征维度信息的变电站点云数据集。
2)运用DBSCAN 算法对各层进行初步聚类,获得各层的聚类结果。若设备存在各层,噪声只存在某层的高度,此时判定噪声删除。
3)根据相邻特征平面点云数据位置和大小的重叠程度,进行调整和筛选,得到设备平面范围的层间整合结果,以此区分噪声和设备。
4)从原始点云数据中分离设备,删除剩余噪声,获得去噪后的变电站设备的点云数据。
2 电气设备提取与匹配
2.1 基于邻域特征聚合的电气设备提取方法
预处理后的变电站点云数据包含多种电气设备,为实现模型的快速匹配,从变电站场景中提取单个电气设备,设置独立的点云数据。考虑传统目标提取方法针对大型场景处理时存在准确度和效率低的不足,因此,基于深度神经网络的语义分割算法基础结构为编码-解码结构,提出由特征编码、特征解码和特征学习3 个模块组成的邻域特征聚合电气设备分割提取方法。
首先通过特征编码模块提取出点云数据的空间信息,转化为易于学习数据特征。在此模块中构建了基于邻域特征聚合的编码结构,通过级联编码实现点的特征表征范围的扩大,增强局部特征学习能力。然后通过解码有效筛选提取的特征,为了特征学习模块更深层次和更优质量的学习,对其扩增压缩后的重要特征。为提高特征提取速度,针对输入的点云数据,在编码和解码过程中分别进行随机下采样和上采样,以减少处理点数量及还原点数量。最后经过3 层全连接层的编码-解码特征学习获得点云数据重要特征,通过学习特征模块得到各点分割标签,完成分割提取。提取过程结构如图3 所示。图中,N表示点的数量;Sin表示特征维数;nclass表示特征标签数量;FC 表示全连接层;RS 表示随机下采样;US 表示随机上采样;MLP 表示多层感知机;DP表示随机失活层。

图3 邻域特征聚合电气设备提取示意图Fig.3 Schematic diagram of neighborhood feature aggregation for electrical equipment extraction
2.2 基于图像识别的快速匹配方法
模型匹配是构建变电站模型的关键技术,如何将具有真实位置信息的独立电气设备点云数据一一匹配到模型库中,并准确放回变电站场景,十分重要[14-15]。提出基于图像识别的快速匹配方法,该方法不仅能够避免深度神经网络识别正确率低和无法直接对应模型库标准模型的不足,还能提高设备精细匹配效率。基于图像识别的快速匹配方法的核心思想是运用图像识别方法初步识别和分类分割结果,基于模型库设备种类对分类设备点云进行型号匹配,减少匹配迭代次数[16-17]。
为提高模型匹配效率,在进行设备匹配前,对杂乱的设备进行识别分类。利用迁移学习[18-19],以VGG16 网络模型为基础网络模型,搭配特征学习,完成电气设备的识别分类任务。其中VGG16 网络模型是由13 层卷积层、5 层最大池化层和3 层全连接层构成的一种卷积神经网络,通过在卷积过程中加入激活函数转换线性到非线性、全连接层引入Softmax 函数映射完成分类。降低特征提取网络模型训练时间成本的同时,以更大数据集训练的方式取得的特征提取效果更好。
完成电气设备初步分类后,利用迭代最近法(iterative closest point,ICP)算法将各类设备与标准模型库进行匹配,获得设备具体型号。通过求解标准模型库到设备点云的转换矩阵,将模型库中的对应模型在该设备点云对应位置放置,从而实现完整变电站三维场景模型的搭建,过程如图4 所示。各类设备的标准CAD 模型库是由AutoCAD 软件人工搭建,可适用于不同变电站的场景搭建。但由于ICP算法是通过对应点搜索和变换矩阵求解的方式匹配待匹配与目标点云数据集,需要提前将标准模型库的CAD 模型转三角面网格化,密度采样后得到点云模型。
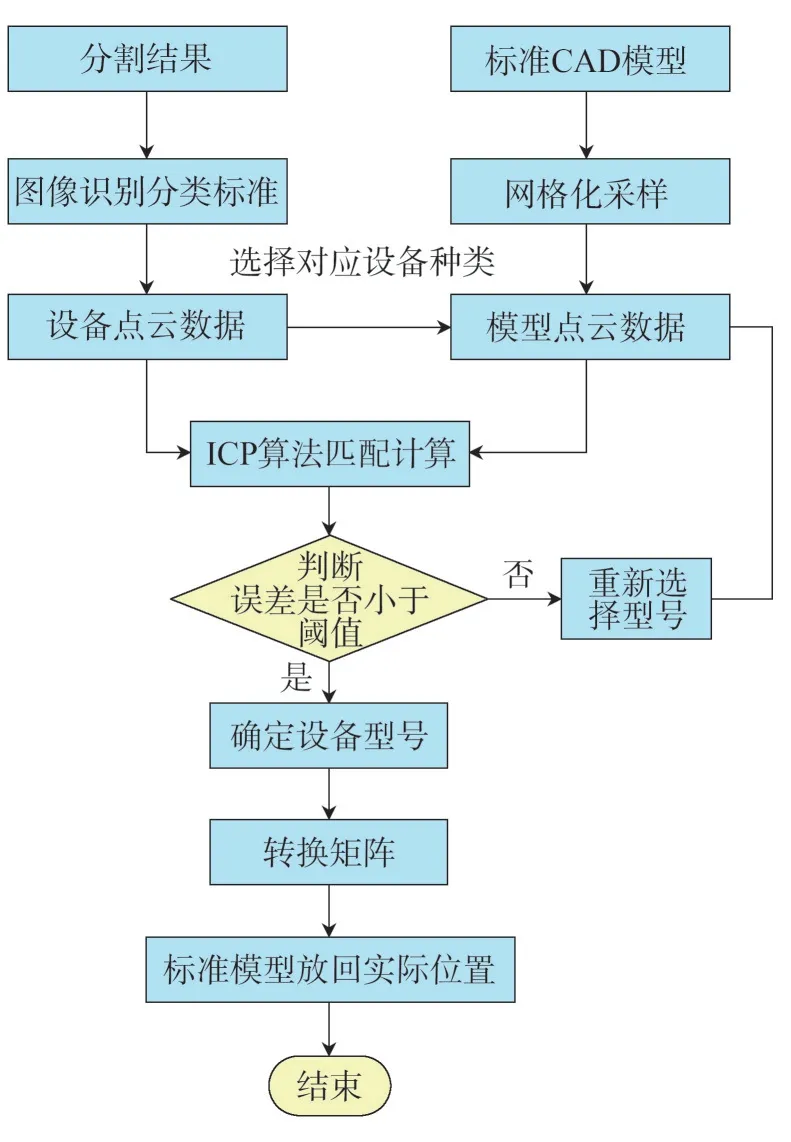
图4 基于图像识别的快速匹配方法Fig.4 Fast matching method using image recognition
3 算例分析
以某变电站中的电气设备情况为例,验证所构建的基于点云数据的变电站三维建模方法的有效性。以文献[20]中的数据为基数,采用近红外激光束波长设置为1 550 nm 的FARO Focus X130 地面激光扫描仪对变电站区域内的设备、建筑物、高压线和噪声进行位置和颜色的扫描,得到整个变电站146 GB 的点云数据。
为完全删除地面数据,考虑变电站地面起伏,将变电站网格化处理,划分为5 m×5 m 大小的网格,统计各网格地面高度,处理后合并网格,获得地面分离的变电站数据。删除高于地面15 m 以上的点云数据。基于网格划分的地面高度统计信息,运用本文提出的概率统计方法对地面数据进行删除处理,结果如表1 所示。由表1 可知:通过对顶部和地面数据的删除,点云数据大小发生了明显改变,极大减少了点云数据量。此次数据处理将大大提高后续数据的计算效率。
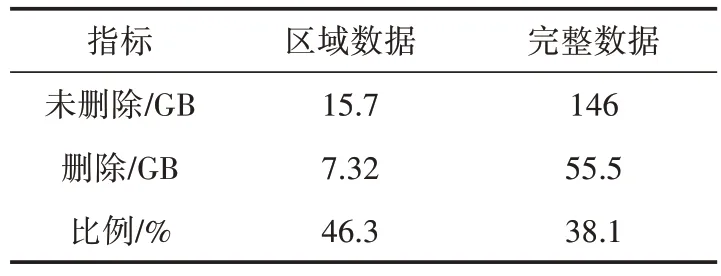
表1 删除地面数据与否对比Table 1 Comparison of whether to delete ground data
为明显区分高、低密度区域,设置较大邻域点数k>100 和标准差倍数n=0.01 的ADVFA 算法,以高、低密度点分别为0.15 m 和0.06 m 的棱长进行压缩,得出表2。为验证压缩结果的可靠性,与传统曲线采样压缩方法进行比较。

表2 压缩前后数据对比Table 2 Data comparison before and after compression
为更直观地展示所提算法的压缩效果,截取220 kV 中2 个开关的点云数据,通过本文ADVFA 与传统压缩算法进行比较,压缩效果如图5 所示。由图5 可知:两种算法对设备连杆的压缩效果区别较大,本文所提算法能够保留更多的设备连杆,柱子处高密度点云数据被压缩掉,而低密度区被更大程度地保留下来。
由电气设备高度(如表3 所示)确定设备特征平面。在实际场景中,13~15 m 的点云数据为高压线与龙门架连杆数据,为减少分割点云数据和提取电气设备的难度,进行提前处理。因此,选取[0.6 m,11 m]为特征高度H={0,1,2,3,4,5,6,7,8,9,11}。确定特征高度后,设定DBSCAN 聚类算法输入领域半径参数为0.5 和最小密度阈值为50,按照图2 的流程运用DBSCAN 和纵向约束层次模型进行去噪处理,结果如图6 所示。
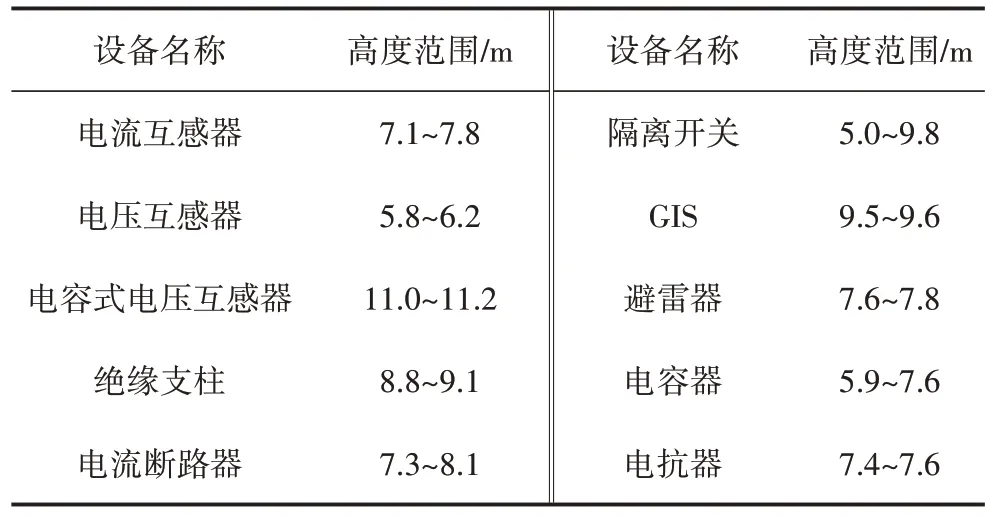
表3 电气设备高度统计Table 3 Height statistics of electrical equipment
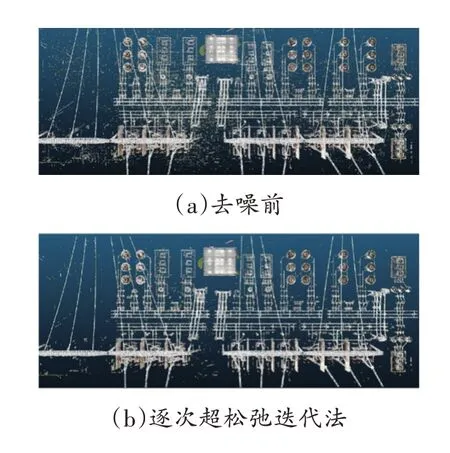
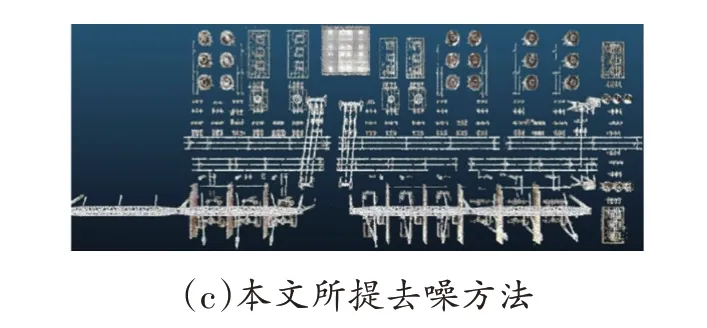
图6 去噪对比分析图Fig.6 Denoising comparative analysis diagram
图6(a)和图6(b)的嘈杂背景明显多于图6(c)。由此可知,逐次超松弛迭代法虽然能够去除大部分低密度噪声,但去除高密度噪声区的效果较差,且容易误删设备连接杆。而本文所提出的去噪算法,整体去噪效果较好,不仅能够去除低密度噪声区,且能在不破坏设备结构的条件下,去除高密度的树、桩、高压线等噪声。
以去噪后的点云数据为输入集进行电气设备提取。设置包含11 种电气设备及母线、龙门架、建筑物和墙背景的15 个标签,以一种颜色表示一种标签类型进行提取,提取前后的结果对比如图7 所示。

图7 设备提取结果对比图Fig.7 Comparison of device extraction results
根据上述分割结果,正确分割设备数量和总设备数量的比值为判断标准进行设备分割判断,结果如表4 所示。由表4 可知:与传统模型提取结果进行对比分析,本文所提模型设备提取准确率较高,整体提取结果准确率大于97%,且大尺寸设备提取结果准确率高达100%,除了部分外观相似设备效果不佳,基本实现变电站的设备提取。
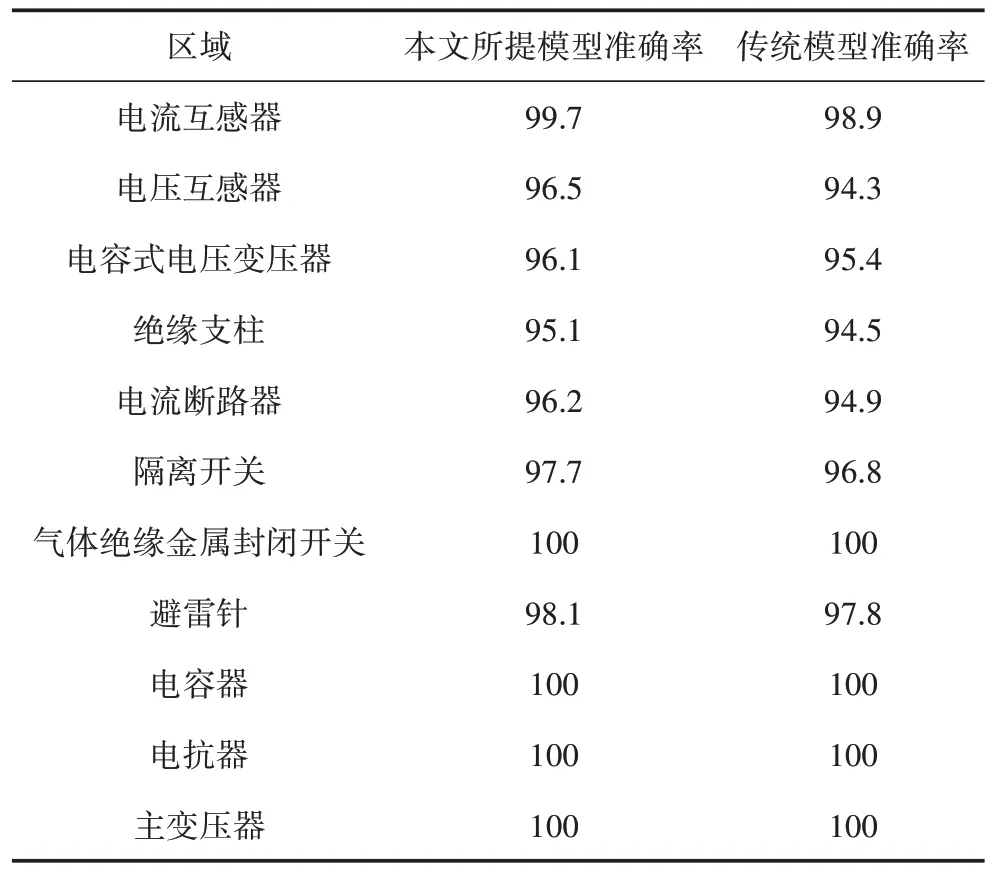
表4 设备提取准确度Table 4 Accuracy of equipment extraction 单位:%
对11 种设备类型的多种不同型号转为点云数据标准模型,与分类后的点云模型进行匹配,如表5所示。避雷器(lightning arrester,LA)、电流互感器(current transformer,CT)、电容式电压互感器(capacitive voltage transformer,CVT)、电流断路器(current breaker,CB)和气体绝缘金属封闭开关设备(gas-insulated metal-enclose switchgear,GIS)。由表5 可知:对应类别的点云设备和模型点云相互比较,所提去噪方法取得良好的匹配结果,且大大缩短了迭代时间,更快速地得到匹配结果。
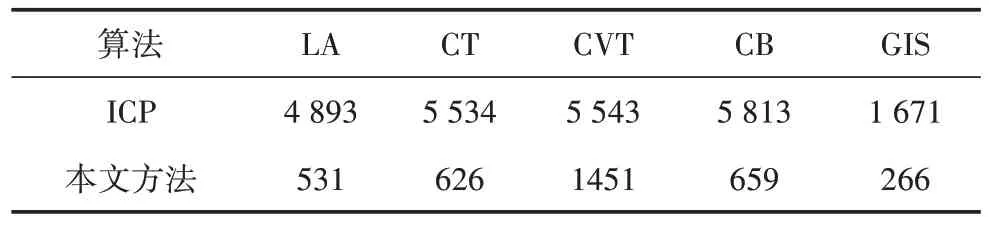
表5 不同设备匹配时间表Table 5 Matching schedule of different devices 单位:s
4 结论
针对变电站电气设备点云数据建模的关键技术及特点,提出一种基于点云数据的变电站三维快速建模方法,解决变电站建模存在的噪声残留多、模型匹配效率低、人工干预多的难题。主要研究成果为:
1)运用ADVFA 算法,以计算的点邻域密度为标准,采用不同参数对不同密度区域点云进行压缩处理,既能自适应压缩点云数据,又能保留多柱体的内部连接杆,解决了变电站点云数据量大、分布不均的问题。
2)基于DBSCAN 的去噪算法,引入高度特征,区分电气设备和背景噪声,删除97%的高密度噪声,解决了高密度背景噪声和噪声残留问题。
3)基于邻域特征聚合的提取方法,利用编码、解码模块提取空间特征,加强学习邻域空间特征,实现了电气设备快速分割提取,准确率高达97%,解决了分割难度大的问题。
4)基于图像识别的快速匹配方法分类识别分割提取后的单个电气设备点云数据的准确率高达99%,电气设备点云模型与模型库标准模型进行匹配减少了计算量,提高建模速度。
5)通过场景仿真验证,得出构建的基于点云数据的三维模型不仅能够准确处理数据,还能快速提取并匹配设备。
猜你喜欢
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
山东工业技术(2016年15期)2016-12-01
现代工业经济和信息化(2016年5期)2016-05-17
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25
河南电力(2015年5期)2015-06-08
机电信息(2015年6期)2015-02-27
会计之友(2014年28期)2014-10-13
河南科技(2014年15期)2014-02-27
河南科技(2014年8期)2014-02-27