
Ti3C2Tx MXene 基复合材料驱动器的制备及研究进展
2024-04-02 07:06汤建新蔡天骄朱雪荣张继德伍文英
包装学报 2024年1期
汤建新 蔡天骄 朱雪荣 汤 力 张继德 杜 次 伍文英 王 武
湖南工业大学生命科学与化学学院 湖南 株洲 412007
过渡金属碳/氮化物(MXene)作为一类新兴的2D材料,由过渡金属碳化物、氮化物或碳氮化物组成。其通式为Mn+1XnTx(其中“M”表示过渡金属,“X”表示C或N元素,“Tx”表示表面终止基团(如—O、—F和—OH),n=1, 2, 3)。Ti3C2TxMXene最初是通过蚀刻Ti3AlC2中Al原子层获得的。在剥落层的外表面上,通常存在蚀刻过程中产生的—O、—F和—OH等官能团[1-2],且不受控于反应[3]。因此,MXene具有许多优异的性能,例如表面官能团的亲水性、光热响应性能、良好的导电性、机械柔韧性、易于功能化等。
MXene基驱动器是由MXene材料制备的具有刺激响应能力的智能结构[4-5],可以在外界刺激(电场、磁场、热、光、pH、压力等)下发生体积、颜色的变化[6],甚至产生可弯曲的3D形状变化[7]。MXene基驱动器的研究更多集中在电活性、光热和湿度敏感等方面[8-11]。不同类型的驱动器,其响应机制不同。例如,离子电活性软驱动器是离子根据外部电场的重排而产生弯曲形变[12]。光驱动器可以由多种机制产生变形,包括热膨胀/收缩、分子构型的变化[13]等。因此,本文首先介绍了MXene不同的合成方法,然后概括了MXene基驱动器的制备方法及驱动机理,最后讨论了MXene基驱动器的应用现状和潜在应用,并对MXene基驱动器在软机器人、智能传感器等领域的应用进行了展望。
1 MXene的制备
氢氟酸(hydrofluoric acid,HF)是最早用于制备MXene的蚀刻剂。HF蚀刻也是使用最广泛的方法,既能保持MAX相(MAX相的通用分子式为Mn+1AXn(n=1, 2, 3),其中M代表过渡金属,A代表Ⅲ、Ⅳ主族元素,X代表C或N元素)的2D结构,又能去除A层。HF溶液与Ti3AlC2的反应[14]包括:
HF腐蚀性太强,在实验过程中会对人体和环境产生危害,且蚀刻方法及其制备的MXene性能还不够理想。因此,许多科研工作者开始尝试用其他物质来代替HF。2014年,M. Ghidiu等[15]发现LiF和HCl反应比HF更温和、更安全,并且通过LiF+HCl成功刻蚀Ti3AlC2制备出Ti3C2MXene。A.Lipatov等[16]报道了一种改进的合成方法,生产了高质量的单层Ti3C2Tx薄片。LiF与MAX的摩尔比从5:1增加到 7.5:1后,能提供过量的Li+离子用于嵌入MXene,同时HCl与LiF比率的增加也促进了Al的蚀刻。改进后产生的Ti3C2Tx薄片质量明显更高,尺寸更大。这个方法虽然避免了直接使用HF带来的危险,但HCl和LiF反应会释放一定量的HF气体,对环境造成危害,且存在飞溅或倾倒液体的风险。随后,研究者发现一些熔融盐在高温下可以和MAX相反应来制备MXene。P. Urbankowski等[17]使用熔融氟化盐从Ti4AlN3前驱体中蚀刻Al,成功制备了Ti4N3TxMXene。结果表明,得到的Ti4N3TxMXene的晶型结构不如HF刻蚀的MXene(如Ti3C2Tx)。此外,Ma G. L.等[18]用氧化铝、钛粉和石墨粉与氯化物通过熔融盐法得到MAX(Ti3AlC2),然后添加CuCl2到MAX中原位刻蚀得到MXene,实现从MAX到MXene的一步合成。虽然此方法简便快速、成本低,并且反应介质为熔融盐,制备过程中避免了MXene的氧化,制备效率得到了提高,但通用性较差。Wu J.B.等[19]开发了一种无水离子热合成Ti3C2TxMXene法,在低成本氯化胆碱和草酸基溶剂中蚀刻原始Ti3AlC2MAX,并在NH4F的存在下制备Ti3C2Tx。Ti3C2Tx具有高达98%的纯度。该方法在室温下操作固体前体和产物材料,因而比较安全和方便。
蚀刻通常使用水热工艺,在高温高压反应釜中进行。蚀刻温度高于100 ℃有利于MXene的合成。2016年,Wang L. B.等[20]利用水热法制备了Ti3C2TxMXene。以NH4F溶液作为蚀刻液,在烘箱中150℃加热24 h,然后在室温中冷却即可制成高纯度的Ti3C2TxMXene。然而,酸蚀刻制备Ti3C2TxMXene通常超过了10 h。针对制作时间长、反应温度高,Liu F. F.等[21]报道了快速制备Ti3C2TxMXene的方法,通过调整蚀刻时间和温度,优化工艺条件(50 ℃、40% HF)蚀刻Ti3AlC2粉末仅0.5 h,成功得到了具有分散的手风琴状结构的Ti3C2TxMXene。Ti3C2Tx在空气中300 ℃下以及在真空中800 ℃下均能保持稳定,且Ti3C2TxMXene具有电磁干扰屏蔽效果。
限制MXene进一步研究和商业应用的主要因素之一是其在水溶液中储存时易氧化。针对此问题,研究者在Ti3AlC2MAX相的合成过程中加入过量的铝,以改善Ti3AlC2晶粒的结晶度和碳化学计量,得到Al-Ti3AlC2[22],再由这种前体生产质量更高的MXene纳米片(Al-Ti3AlC2),如图1所示。Al-Ti3AlC2薄片的水悬浮液保质期超过了10个月,说明该合成方法有显著的改善效果,有望得到广泛使用。总之,在众多科研工作者的不断努力下,Ti3C2Tx取得了许多突破性进展,成为了MXene家族的主力军。
2 Ti3C2Tx MXene基驱动器的制备及驱动机理
2.1 光热响应型驱动器
驱动器是一种将输入能量转换为机械能的装置,输入能量可以是热、光、电场等。最常见的驱动器是光热响应型驱动器。MXene良好的电导率[23]和高效的光热转换率[24]有利于实现电能和光能转化为热能,因此可以得到对电、热、光等多种刺激响应的驱动器。Liu W.等[25]使用较简单的浇铸法制造了含有MXene和低密度聚乙烯(low density polyethylene,LDPE)复合材料的双层驱动器,如图2所示。LDPE具有非常高的热膨胀系数(coefficient of thermal expansion,CTE)和较低的导热系数。相反,MXene的CTE较低,导热率高。因此,这两种材料在热性能上的差异有利于驱动器的制备。
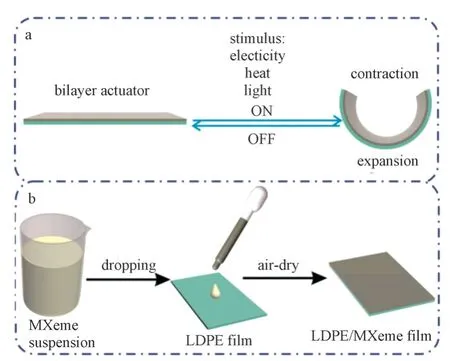
图2 MXene/LDPE双层驱动器的工作原理和制作工艺Fig. 2 Working mechanism and schematic fabrication process of MXene/LDPE bilayer actuator
Cai G. F.等[26]以Ti3C2Tx-纤维素复合材料作为活性层、多孔聚碳酸酯(polycarbonate,PC)膜作为惰性层,得到Ti3C2Tx-纤维素/PC驱动器。活性Ti3C2Tx-纤维素层作为加热器,温度升高时水分子膨胀或解吸,导致复合层的体积收缩,而高温下PC膜的体积膨胀,最终两层之间的尺寸差异使Ti3C2Tx-纤维素/PC膜弯曲变形产生驱动。
水凝胶是一种具有三维网络结构的柔性复合材料。水凝胶驱动器具有异质结构,并能对特定的环境刺激作出响应,是构建软驱动器和柔性机器人的理想候选材料。Ge G.等[27]通过调整MXene与聚合物之间的动态相互作用,制备了一种光热驱动器。此驱动器是用聚丙烯酸和聚乙烯醇-MXene水凝胶分别作为驱动层和被动层。在近红外(near infrared,NIR)照明5 s后,驱动器的高度在0.585~0.769 mm之间变化,曲率在1.710~2.063 mm-1之间变化。这种驱动归因于驱动层和被动层之间的非均匀光热容。Xue P.等[28]报道了可编程的NIR驱动各向异性水凝胶驱动器,通过聚异丙基丙烯酰胺(poly(nisopropylacrylamide),PNIPAM)水凝胶与MXene纳米单体的原位自由基共聚,利用电场诱导MXene纳米片沿其方向上呈现一定的浓度梯度分布。由于靠近阳极一侧的交联密度较高,PNIPAM链的动力学受到很大限制。因此,在NIR照射下,水凝胶失水会导致靠近阴极区域的PNIPAM链产生更大的收缩,从而产生向阴极侧的弯曲变形。而MXene的加入可以使温度变化更明显,增强水凝胶的驱动性能。图3中,蓝色部分不施加电场,而黄色和粉色部分分别施加正电场和负电场。如图3a~d所示,当电场只施加到水凝胶的中间部分时,得到了可逆的U型;当电场施加到一半时,形成了J型。S型和Ω型的水凝胶驱动器也可以通过在电场方向上应用不同的电极和切换来实现。如图3e~f所示,水凝胶驱动器在NIR照射下可执行不同的光机械功能,包括抓取、提升、放下和释放物体,且在水中表现出可逆的开启和关闭作用。

图3 可编程的各向异性水凝胶驱动器的NIR驱动变形Fig. 3 NIR-driven shape-morphing of programmable MXene containing anisotropic hydrogel actuators

彩图
此外,Xue P.等[29]还将表面功能化的MXene(K-MXene)/ PEDOT:PSS墨水与PNIPAM水凝胶原位共聚,设计了一种均匀的导电水凝胶。PEDOT与K-MXene之间强烈的π堆叠作用以及PEDOT链从苯结构向醌结构的转变,可以形成高导电率水凝胶。将导电水凝胶与彩色聚合物结合可感知形状变形,即彩色聚合物作为被动层,导电水凝胶作为主动层,在NIR照射下主导形状变化[30-31]。如图4所示,先将结构上彩色的聚合物薄膜激光切割成适当的条纹,然后将导电水凝胶原位聚合到有图案的条纹上。在808 nm NIR照射下,不同方向条纹的水凝胶驱动器可以分别卷成环、筒和螺旋等形状。
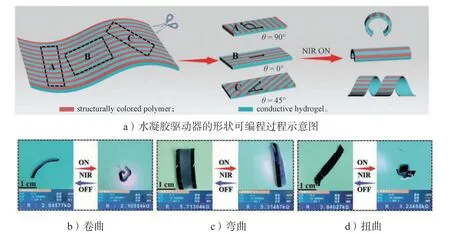
图4 水凝胶驱动器的光驱动示意图Fig. 4 Schematic diagram of optical drive of hydrogel driver
由于传递信息和躲避捕食者的需要,蝴蝶的翅膀会改变颜色。受此启发,Li M. Z.等[32]制造了一种高效的光热响应MXene-水凝胶肌肉,将翅膀和身体之间的关节与MXene-pDADMAC软驱动器集成形成肌肉结构,制作了一只人工蝴蝶。蝴蝶的翅膀是由一个紧密排列的聚苯乙烯微球组成,聚苯乙烯微球呈长程排列,并通过界面自组装的方法沉积在一个高亮度的不锈钢板上,随着观看角度的变化表现出不同的颜色。图5显示了MXene-pDADMAC操纵蝴蝶翅膀拍打的机理。首先,pDADMAC是一种阳离子聚电解质,可以提供亲水位点,因而对热和湿度都有反应。其次,MXene可以快速将光能转化为热量,在pDADMAC中引入MXene可以促进肌肉收缩。在热条件下,水的解吸导致MXene-pDADMAC垂直坍塌和横向收缩,诱导PhC片的快速提升。在NIR照射下,随着人工蝴蝶的翅膀从15.1°上升到50.8°,其翅膀的颜色从紫色变成了红色。Yang M. Y.等[33]制备了一种MXene-LCE(liquid crystalline elastomer)软管驱动器。MXene纳米单体与LCE基质具有较高的相容性,可以原位光聚合成聚合物网络,增强了LCE软管驱动器的力学性能。独特的中空结构使MXene-LCE软管驱动器延缓了径向的热传导,此外,光照的正面和阴影的背面产生了较大的温差,从而使其具有快速的光响应特性。因此,NIR诱导的局部收缩导致MXene-LCE软管驱动器的机械弯曲。如图6所示,MXene-LCE软管驱动器实现了像植物茎一样的自适应趋光性。
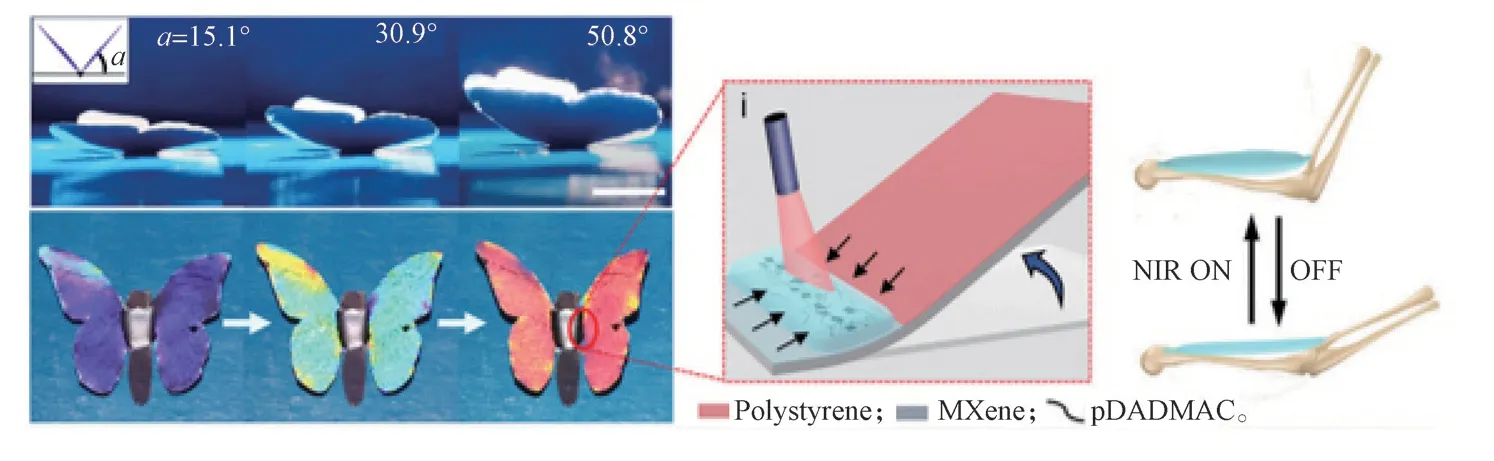
图5 人造蝴蝶翅膀拍打原理示意图Fig. 5 Schematic diagram of flapping principle of artificial butterfly wings

彩图
2.2 离子响应型驱动器
离子响应型驱动器的响应机理是在外部电场的影响下复合材料体系中离子迁移导致弯曲变形。该驱动器是由夹在两个柔性电极之间的电解质膜组成,电解质膜中含有不同大小的可移动的阳离子和阴离子。在电极上施加电位使离子液体分离电解质膜中的阳离子和阴离子,并使移动的离子向相反的电极移动。由于阳离子通常比阴离子大,离子分离导致厚度的不对称和体积变化,使驱动器弯曲。
电极需要在反复弯曲变形过程中保持高导电性,这要求离子响应型驱动器具有较好的力学性能,如柔韧性和可拉伸性。通常利用碳基材料与导电聚合物如PEDOT:PSS[34]或聚苯胺混合,作为一种高度柔性的导电基体[35]。S. Umrao等[36]提出了一种新的离子响应型驱动器。通过超声处理,将Ti3C2Tx插入水和二甲基甲酰胺的混合溶剂中,将得到的Ti3C2Tx悬浮液直接与分散在水中的PEDOT:PSS混合,形成复合电极前驱体。然后,将复合电极前驱体滴铸在Nafion/EMImBF4电解质膜上,形成一个驱动器。由高度灵活基体PEDOT:PSS制得的复合电极比纯MXene制备的复合电极表现出更好的力学性能。原始的Ti3C2Tx电极在弯曲变形时非常脆弱,容易从电解质膜上剥离,而Ti3C2Tx/ PEDOT:PSS电极更加灵活,即使在高弯曲水平下也能与电解质膜保持完美的黏合。Pang D.等[37]报道了基于Ti3C2Tx的电化学驱动器,该驱动器包括双层和三层结构。这两种结构都是由Ti3C2Tx柔性独立膜通过真空过滤MXene悬浮液制备。在双层结构中,一个Ti3C2TxMXene胶片附在胶带上。如图7所示,将驱动器浸入1 mol/L硫酸溶液中,通过三电极配置-0.8~+0.2 V和+0.2 V的银丝来测试性能。在电化学过程的充放电循环中,硫酸电解质容易发生可逆氧化还原反应,产生质子H+,质子的插入/脱插入改变了MXene结构的层间间距,使MXene条带变形。
2.3 湿度响应型驱动器
湿度响应型驱动器的基本原理是随相对湿度的变化而改变形状。湿活性部分根据周围的含水量,通过物理吸附水分子,使体积发生变化,进而改变其物理外观;惰性部分产生层之间的界面应力,导致弯曲变形[38]。MXene由于其丰富的极性官能团和MXene纳米片之间极大的自由间距,作为湿度响应驱动器的活性部分具有巨大的潜力。Cai G. F.等[25]开发的MXCC/PC双层结构驱动器(见图8),不仅能被电、光驱动,还能被湿度驱动。该双层驱动器使用吸湿性Ti3C2Tx-纤维素复合材料作为活性层,使用PC膜作为惰性部分。其中,纤维素由于富含羟基而用于提高Ti3C2Tx对湿度的敏感性。在PC膜上过滤沉积了一层Ti3C2Tx-纤维素复合材料,Ti3C2Tx-纤维素复合材料与PC膜之间吸湿性的差异引起了不平衡的体积变化,从而导致驱动器弯曲。Zhang Y. L.等[39]报道了一种将Ti3C2Tx湿度驱动器与金属网结合的方法。该驱动器随着湿度的增加而逐渐弯曲,具有快速响应性和良好的稳定性。许多材料可以取代纤维素作为共吸收剂,而Ti3C2Tx也可以用其他MXene来代替,因此,驱动性能有望进一步提高。
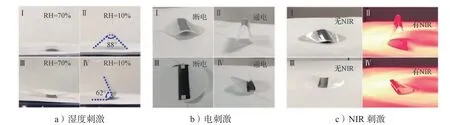
图8 MXCC/PC双层结构驱动器的多响应能力Fig. 8 Multiresponsiveness capabilities of MXCC/PC bilayer-structured actuator
2.4 其他响应型驱动器
研究者发现MXene在外部压力下会改变层间距。基于此,Ma Y. N.等[40]制作了一种基于Ti3C2MXene的柔性压电传感器。原位透射电子显微镜结果表明,压力下层间距变化巨大。该传感器显示出较高的机械可逆性(超过4000次)和快速响应(<30 ms),还可以监测和区分细微的人类活动,如吞咽、咳嗽、关节弯曲等。此外,P. Sambyal等[41]报道了一种基于钕和铁双金属有机框架(NdFeMOFs@700)的磁、电双响应软驱动器。图9展示了该软驱动器在电刺激和磁刺激下的驱动效果。软驱动器采用NdFeMOFs@700和PEDOT-PSS制造,与基于脉冲的驱动器相比,其电荷存储容量提高了4.5倍,具有良好的循环稳定性。然而,目前关于MXene基磁响应型驱动器的报道不多,在之后的研究中可以进一步考虑MXene磁响应性能。

图9 NdFeMOFs@700-PP软驱动器在电刺激和磁刺激驱动机制下的工作原理示意图Fig. 9 Schematic demonstration of working principle of NdFeMOFs@700-PP electrode based soft actuator under electric stimuli and magnetic stimuli actuation mechanism
3 Ti3C2Tx MXene基驱动器的应用
为了扩大环境的适应性,人们需要制造诸如电、NIR和紫外光(ultraviolet,UV)等具有多种刺激响应的驱动器。Chen G. N.等[42]制备的AgNWs/Ti3C2TxMXene热驱动器可以对电、NIR和UV等多种类型的刺激做出响应。其原因是AgNWs的高导电率、MXene优异的光热性能、MXene/AgNW层与LLDPE层的CTE的巨大差异,特别是AgNWs与MXene之间的等离子体协同效应。因此,该驱动器可以在低驱动电压下滚动2200°,NIR下弯曲360°,在UV下1.2 s内弯曲360°。此外,热驱动器可通过添加荧光材料在UV下弯曲时发光。同样,Liu W. J.等[43]也利用两种材料之间CTE不匹配的原理制备了一种在LDPE薄膜上响应电压、热和光的驱动器。此驱动器可以像自然捕蝇器一样感知温差和捕捉物体;可以像行走机器人一样运行,速度高达16.52 mm/min;还可以作为开关,集成到电路中,用于一些需要非接触式开关的极端场合。Xu L. L.等[44]设计了一种基于MXene和PDMS交联的双晶驱动器。该驱动器可以在热、光、电、正己烷蒸汽等各种刺激下实现大的可逆驱动变形。除了变形外,它还具有自传感功能,可以实现驱动行为的实时反馈,即根据驱动过程中MXene层的相对电阻变化来监测触摸感知情况。如图10所示,利用MXene/PDMS双晶驱动器模拟了生物体的一系列生物行为,如跳跃、爬行和自振荡等行为。Tang Z. H.等[45]开发了一种电响应和光响应的Ti3C2TxMXene薄膜基柔性BMB驱动器。在电热和光热刺激下,通过吸收/解吸水分子,使疏水BOPP层膨胀/收缩和亲水BC层收缩/膨胀,这两层同时为驱动器的驱动行为提供驱动力。可以观察到,驱动器在电热刺激下或者暴露在NIR下时,发生快速弯曲运动。驱动器展示出包括强人工臂、双指夹具、蠕虫机器人和仿生含羞草等不同的应用。
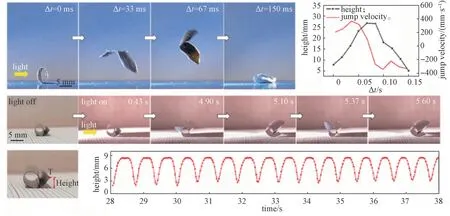
图10 MXene/PDMS双晶驱动器的跳跃运动和自振荡Fig. 10 Jumping motion and self-oscillation of MXene/PDMS dual-chip driver
此外,Li P. D.等[46]报道的MCPM软驱动器可以将湿度的变化转化为机械能和电能,实现实时感知湿度和运动模式。MCPM驱动器一旦接触到人体皮肤,就会立即卷起,然而,同样的薄膜却可以平放在戴手套的手上或在一个充满水分的封闭空间中保持平坦,这表明导致薄膜滚动的原因是湿度梯度,而不是湿度本身。在湿度条件下,用不透水的PET密封MCPM的一侧(MCPM/PET驱动器),产生了从水合表面到附近干燥器底层的定向湿度梯度。因此,沿MCPM法向方向的梯度膨胀会引起不对称的膨胀应力,使MCPM/PET驱动器向PET侧弯曲。此外,将一根手指靠近MCPM/PET驱动器,也能立即产生40~80 mV的可分辨高压。这证明MCPM/PET驱动器在非接触的人机通信和高精度控制方面都很有应用前景。带有MCPM/PET驱动器的呼吸监测器口罩可以在高响应电压(>0.1 V)下监测人体呼吸时水分的变化,通过可区分的电压变化清楚地识别人类的正常和深呼吸模式。这表明该驱动器在敏感传感器中也显示出了潜力。Hu Y.等[47]设计了一种基于MXene的放大、非对称微观结构的双晶驱动器。此驱动器是通过将偶联剂IPTS插入到MXene纳米片中来获得。它对自然光具有超高响应,日照强度变化可以引起其连续弯曲变形。用其构造的蠕虫软机器人能在没有人工能量和控制的情况下自主定向运动,还可以运输一个物体在野生环境中爬行,如图11所示。此外,用驱动器构建了举重物体的软手臂,以及能改变面部表情和身体动作的“熊猫”机器人。自然光下,“熊猫”机器人能从沮丧和蜷缩状态变换到快乐跳舞状态。总之,MXene基驱动器的应用主要集中在智能仿生机器人、敏感传感器、非接触的开关设备和智能设备等方面。
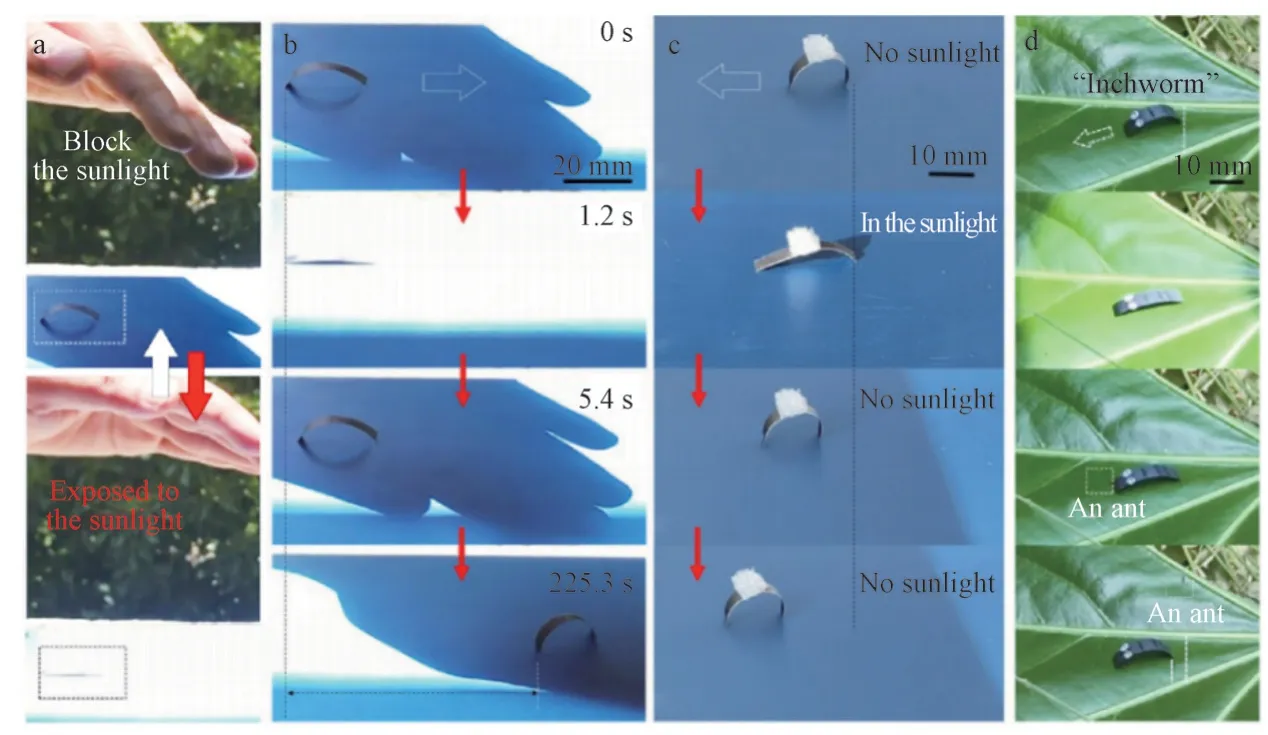
图11 由人手控制的自然光驱动蠕虫机器人模拟运动Fig. 11 Simulated movement of natural sunlight-driven worms controlled by human hands
4 结语
迄今为止,大多数MXene基驱动器是采用简单的纯MXene薄膜或直接从液体前驱体铸造而成。通过对MXene结构的巧妙调控,可以设计不同形状的驱动器,从而实现更为优异的性能。与此同时,鉴于大多数驱动器采用双层结构,MXene与其它组分之间的界面相容性对提高其耐久性和实用性至关重要,这是实现其广泛应用的关键因素。为了更广泛地推动MXene基驱动器的应用,亟需改进MXene的合成、操作及其稳定性。尽管已成功合成了超过40种MXene,但除Ti3C2Tx外其他 MXene容易受氧化的影响,因而目前大部分应用主要集中在Ti3C2Tx上。故未来的研究方向之一是着眼于解决MXene容易氧化的问题。一方面,采用先进的防氧化技术、表面钝化改性技术或者在合成和操作阶段引入保护措施,制备高抗氧化MXene材料。另一方面,在确保MXene不受氧化影响的前提下展现其出色性能。这些努力将为MXene基驱动器的应用打开新的前景,推动其在各种领域的广泛应用,包括但不限于电子、能源储存和传感领域。
猜你喜欢
科学大众(2023年21期)2023-12-05
陶瓷学报(2021年1期)2021-04-13
中国特种设备安全(2021年9期)2021-03-02
军事文摘(2020年20期)2020-11-16
电脑爱好者(2020年6期)2020-05-26
中学生数理化·八年级物理人教版(2020年12期)2020-01-01
中学生数理化·八年级物理人教版(2018年12期)2019-01-31
测控技术(2018年9期)2018-11-25
光学精密工程(2016年5期)2016-11-07
时代英语·高二(2015年2期)2015-05-18
