航天返回舱雷达探测技术研究
2024-04-02 01:58:54刘伟郝艳军葛页邱风周伟奇刘志栋许辉夏凌昊杨予昊饶江滨汪润生张景东
电波科学学报 2024年1期
刘伟 郝艳军 葛页 邱风 周伟奇 刘志栋 许辉 夏凌昊杨予昊 饶江滨 汪润生 张景东
(1.南京电子技术研究所, 南京 210039;2.中国电子科技集团公司智能感知技术重点实验室, 南京 210039;3.江苏省探测感知技术重点实验室, 南京 210039;4.中国人民解放军63610部队, 库尔勒 841000)
0 引 言
航天返回舱再入大气层时速度在10马赫以上,与大气剧烈摩擦会在表面产生一层等离子体鞘套,对电磁波产生吸收、散射和反射等效应,从而形成黑障[1]。黑障区由于存在高动态的等离子体鞘套和尾流,同样导致雷达探测时出现检测困难、探测精度差、跟踪不稳定等一系列问题,无法精准获取返回舱位置和速度,难以确认返回舱状态是否异常,给保障航天员安全带来挑战[2-3]。
黑障区雷达探测历来都是一个技术难题,目前国际上公开发表的相关技术报道很少,应用情况更加未知。对返回舱再入段的等离子体对电磁波传播特性的分析集中于采用时域有限差分(finitedifference time-domain, FDTD)法等数值方法进行模拟,研究电磁波与等离子体之间的相互作用规律[4-6]。文献[7]建立了适用于包括风在内的各种干扰作用下六自由度再入弹道仿真数学模型,并开发了综合仿真软件。文献[8]使用软件COMSOL仿真了电磁波在非均匀等离子体鞘套中的传播特征,研究了返回舱再入大气层时等离子体电子密度对电磁波传播的影响。文献[9]通过设计可抗高温的单向接收探测器,显著降低了常规探测器的多径效应,对等离子体中的电磁场进行了测量。在雷达探测方面,文献[3]提出了针对新型返回舱的C频段雷达跟踪策略。文献[10]针对发射场单脉冲雷达设计实现了一种粒子滤波检测前跟踪方法,可以实现对非合作弱目标的稳定跟踪。文献[11]提出了着陆场伞降轨迹的计算方法,利用精细风资料预测飞船伞降轨迹。文献[12]从临空高超的物理特性出发,分析了雷达探测中的关键技术,提出了检测、跟踪、目标识别等问题的技术解决路径。文献[13]建立了等离子鞘套再入目标的雷达回波模型,分析了等离子鞘套特征参数和电磁波参数对雷达回波特性的影响,提出了频率分集方法,对鞘套目标回波中的“多干扰目标”现象进行抑制。文献[14]提出了多种波形多通道复制跟踪策略,针对鞘套目标特性设计复杂波形、工作方式和跟踪策略,来解决强等离子鞘套环境下雷达对再入航天器的跟踪问题。
目前对于返回舱黑障区雷达探测的研究,均是针对某个具体问题,尚未见完整、系统的解决方案。因此针对黑障区雷达探测问题,我们从机理出发,深入分析等离子体鞘套产生机制、空间分布和运动特性,自主研发了一种针对黑障区雷达探测的模拟仿真方法,并在大量的模拟仿真和有限的实测数据中总结规律,清晰获取了返回舱黑障区的信号特征;通过设计返回舱黑障区认知探测流程,使雷达可以智能判断黑障区等离子体鞘套状态,实时选择最优的工作模式和发射波形,实现不同状态下对返回舱的精准探测。本文所提出的方法和技术可应用于返回舱探测雷达设计及验证,参与各频段雷达对空间目标返回探测任务,为载人航天、探月工程等重大任务提供技术支撑,提升雷达对航天返回舱目标探测的稳定性和可靠性。
1 黑障区目标电磁特性仿真方法
数值模拟方法是研究黑障区等离子体鞘套电磁特性的主要手段,其中最主要的方法就是利用FDTD直接求解时域Maxwell旋度方程,并在等离子体环境中进行了一系列改进[15-16]。但针对常规雷达波段探测返回舱黑障区问题,与探测波长相比,返回舱及其产生的等离子体鞘套电尺寸很大,计算需要极大的计算量和存储量且效率极低,更重要的是,采用FDTD方法难以模拟等离子体鞘套由于复杂运动状态对电磁波的影响。高频算法虽可有效解决计算速度等问题,但是当目标体包裹在各向异性非均匀介质中时其应用就会有所限制。我们考虑到黑障区等离子体鞘套的时变效应,包括介电常数随时间变化引起的寄生调制、目标运动群多普勒引起的信号色散、脉动周期导致的电离参数分布等,引入了蒙特卡洛方法,通过大量随机仿真模拟上述时变效应。进一步考虑到实际工程问题对目标电磁特性的仿真要求以及可实现性,设计一种基于蒙特卡洛和物理光学法的快速模拟电磁波与航天返回舱及其等离子体鞘套相互作用的仿真方法,实现对动态黑障区返回舱的高置信度电磁仿真。
物理光学法一般可以简述为如下三个基本过程:
1)通过几何光学法估计出散射体上每个面元上的场分布;
2)通过散射体表面上的场分布获得面电流、磁流的分布;
3)通过面电流、磁流计算出散射体的远场分布。
但是,由于黑障区等离子体鞘套是非均匀介质,电磁波不再沿直线传播,因此不能简单将均匀介质散射场求解方法直接应用到黑障区仿真。我们提出的方法可用来解决非均匀介质中面元场分布估计:首先,将仿真区间按照不同系统参数分割成相应元胞,同时按电磁波入射方向,将垂直于入射方向的入射平面投影到仿真区间的外边界,构建等效入射面;然后,根据几何光学法中光线独立传播的假定,电磁波从等效入射面到目标体的传播过程可以视为一束在空间上均匀分布的粒子流冲击目标体,通过追踪粒子流的状态模拟电磁波的传播过程;最后通过粒子统计分布等价获得面元场分布,过程如图1所示。另外该仿真方法中所用的网格剖分可与流场仿真一致,减少了空间插值,进一步提升了仿真精度,并且为了减少计算过程中无用粒子对计算资源的占用,通过粒子流传输情况动态调整粒子等效空间分布,算法流程如图2所示。

图1 基于蒙特卡洛的返回舱黑障区仿真方法示意图Fig.1 Schematic of simulation method of reentry capsule in blackout area based on Monte Carlo method
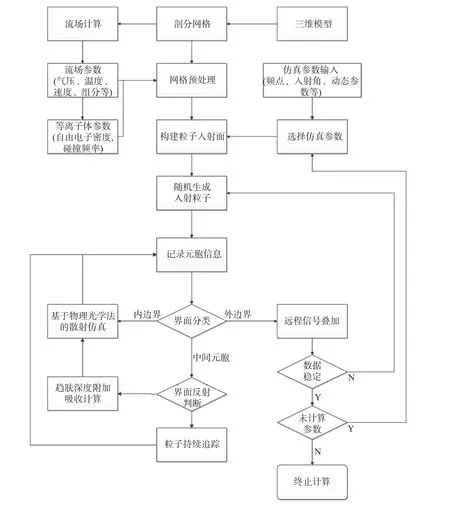
图2 基于蒙特卡洛的返回舱黑障区仿真方法流程图Fig.2 Flow of simulation method of reentry capsule in blackout area based on Monte Carlo method
算法流程主要包含以下几个步骤:
1)在基于计算方位俯仰角构建的粒子入射面上随机生成若干入射粒子并计算初始相位。
2)记录粒子传输经过元胞的信息及判断与下层元胞的反射界面分类。
3)基于界面分类决定传播路径:若为内边界,则采用物理光学法计算散射路径的幅度和相位,并进入第4步;若为中间元胞界则生成随机数,基于随机数与反射率的大小决定粒子的行进状态(反射或继续前进),若反射则附加当前元胞的趋附深度吸收后再以物理光学法计算散射路径,若继续前进则直接进入第4步;若为外边界则进入第5步。
4)计算粒子的当前运动方向及穿过该元胞的幅度和相位变化,并返回第2步。
5)将出射出模拟范围的粒子在远场中叠加并判断计算结果是否稳定,若不稳定则返回第1步继续随机生成若干入射粒子进行计算,稳定则输出结果。
整体而言,该方法在粒子的初始位置及分布、传输过程中经过介质界面的透射/反射状态、穿过元胞时等离子体参数的变化(包括电子密度、碰撞频率和时变参数)均贯彻了蒙特卡洛思想,利用大量随机粒子综合的效应模拟电磁波与复杂分布等离子体的相互作用。
基于上述方法,我们设计了一款软件,并仿真了典型返回舱在不同状态下的目标特性结果,图3是高度40 km、速度16马赫状态下,不同方位角的动态单站目标特性仿真结果,频段覆盖P至X波段。从仿真结果可以看出:随着频率的增加,等离子体鞘套的强度明显降低,其中P、L、S波段鞘套能量对目标特性影响较大;另外,等离子体鞘套多普勒域的分布也会随着频段的上升发生变化,能量最强的多普勒分布随着频率的上升逐渐变大,例如在迎头观测视角下,等离子体鞘套在L波段雷达散射截面积(radar cross section, RCS)最大分布在1~2 km/s的多普勒范围,在C波段则上升至2~3 km/s。
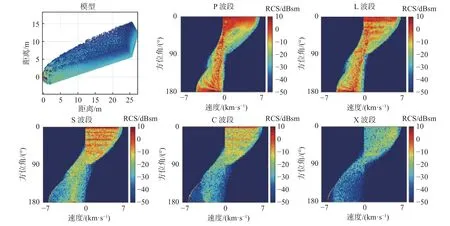
图3 返回舱及等离子体鞘套分布模型与典型状态下不同频段返回舱黑障区目标RCS仿真结果Fig.3 A reentry capsule and plasma sheath distribution model, and target RCS simulation results in blackout area at different frequency bands with a typical state
2 黑障区探测场景及回波仿真方法
航天返回舱目标的返回过程是经过提前设计的,返回过程中制动、再入、着陆以及状态调整和控制都有严格的时间表,因此可以很详细地获得其模拟航迹[17]。基于模拟航迹数据和目标特性仿真方法,可以完整地对雷达探测场景及探测过程中的黑障区回波进行仿真。仿真结果可以作为雷达保障演练的输入,具有重要意义。我们提出基于再入场景的航天返回舱目标单站特性生成方法,并设计了航天返回舱黑障区雷达探测场景设计软件。
采用仿真手段生成航天返回舱目标雷达回波时主要需要解决的问题是复杂时变等离子体鞘套的特性及回波仿真。由于其回波强度及速度分布与飞行状态高度耦合,需要基于若干状态下航天返回舱的电磁特性仿真结果,对鞘套强度分布、速度分布和时变特性进行参数化表征,从而实现大跨度高度速度范围、多视角探测场景下的鞘套目标回波一体化生成,并以目标飞行轨迹为输入生成场景回波。航天返回舱目标单站特性参数化表征及多视角一体化生成流程如图4所示。
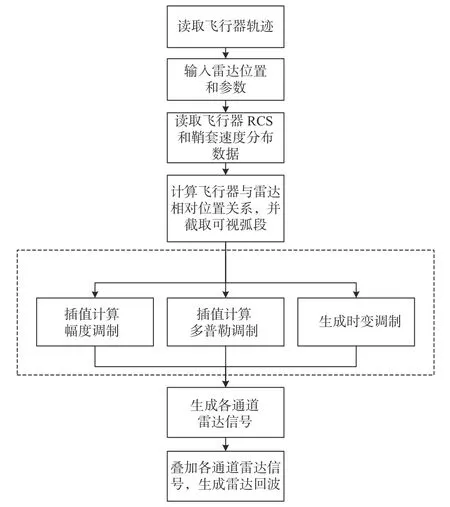
图4 航天返回舱目标单站特性参数化表征及多视角一体化生成流程图Fig.4 Flow of parameterization representation of single station characteristic of reentry capsules and multi-angle integration generation
我们在“神舟十二号”返回舱任务之前,基于仿真方法对某C波段雷达探测场景进行了仿真,并与实测数据对比(如图5所示),可以看出在大部分时间段仿真和实测的符合度很高,只有当目标远离雷达时,仿真RCS与实测的起伏特性差距稍大。原因是仿真模型尾部的结构准确度有待提高,但由于主要产生等离子体鞘套的迎风面准确度较高,尾部结构准确度对等离子体鞘套分布影响不大。基于目标特性仿真结果生成不同状态下的雷达信号,如图6所示。目标特性、仿真场景和全过程回波仿真可为后续载人航天返回任务预案设计、模拟演练等工作提供技术支撑。
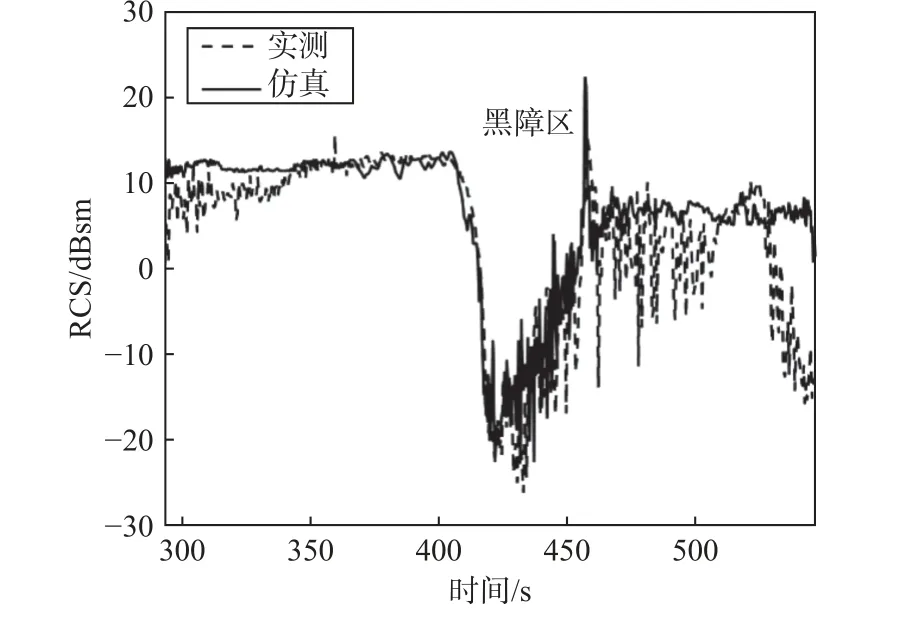
图5 “神舟十二号”返回舱C波段雷达仿真与实测RCS序列对比Fig.5 Comparison between C-band simulation RCS and measured RCS of the “Shenzhou 12” reentry capsule

图6 不同状态下雷达回波仿真结果Fig.6 Simulation results of radar signal with different states
3 基于图像学的返回舱黑障区检测方法
3.1 返回舱黑障区时变特性对雷达信号的影响
黑障区产生的等离子体鞘套特性严重干扰了雷达对目标本体的检测跟踪[18]。在湍流作用下,等离子体鞘套电子密度等参数是不稳定和随机变化的,具有时变特性。我们通过风洞试验和实测数据分析(图7),基本可以认为等离子体鞘套时变频率集中在50 kHz以下,且当等离子体鞘套强到覆盖本体目标回波时,在百微秒及以上的时间尺度内回波相参性基本消失。

图7 风洞试验中鞘套层流区和湍流区的频谱图Fig.7 Frequency spectrums of the laminar region and turbulent region of sheath in the wind tunnel experiment
因为等离子体鞘套的快速时变周期快于一般信号脉冲宽度,导致回波信号失真,脉压结果呈现严重的拓展现象,而传统恒虚警率(constant false-alarm rate, CFAR)检测方法会出现多目标和距离误差大等问题,测距误差可达数千米,给航天返回舱目标本体检测带来严重影响,导致跟踪过程中出现跟错、跟丢、混批等问题。为了准确检测出等离子体鞘套中目标本体,需要正确判别等离子体鞘套环境,提出全新的检测方法。
3.2 基于图像学的检测方法
为了解决目标本体的高精度检测和定位问题,我们提出可以对回波信号中所包含目标本体和鞘套的时间调制特性进行分析,通过时变性差异来检测目标本体位置的方法。
对于返回舱目标窄带跟踪回波,通过精细切分滑窗,并将形成的一组雷达一维距离像按照时间顺序排列,形成时间-距离二维图像。一组仿真的时间-距离二维图像如图8(a)所示,分别对应于噪声、鞘套和目标区域,从时序上看,目标回波区域稳定性较好,而鞘套回波区域的时变性较强,回波呈现杂乱无序的状态。因此,基于时间-距离二维图像,从目标本体与鞘套的脉内时变特征出发,可以通过构建表征时变特征的检测统计量,对中、高能量鞘套中的目标进行检测。基于数学形态学,对图像进行形状与结构的分析和处理,来提取目标本体与鞘套时变特征。

图8 返回舱目标雷达时间-距离二维图像及图像特征Fig.8 Time-distance 2D images and image features of radar signals of a reentry capsule
本文提出两种基于形态学特征的时变表征方法。第一种是轮廓特征,即检测图像局部区域的边缘轮廓。用标准差为σ的二维高斯函数G(x,y)=exp的滤波器对图像进行滤波,计算滤波后图像的拉普拉斯,得到原始图像的二值化轮廓图像。第二种是纹理特征,其描述了图像局部区域的光滑程度。选取合适的纹理滤波器,比如局部熵滤波器,对图像进行滤波获得纹理图像,并进一步获得纹理的边界。图8(b)和图8(c)分别给出了噪声、鞘套和目标区域的轮廓和纹理特征,三者的图像特征有明显区别,由于目标本体在子脉冲间相比噪声和鞘套更加稳定,目标所在位置的轮廓和纹理更加清晰,从而可对目标本体进行准确检测。
3.3 黑障区检测跟踪一体化方法
常规雷达检测跟踪方法在对目标进行探测时,检测和跟踪是互相独立的过程,航天返回舱目标在有鞘套时检测虚警点多、距离误差大,导致跟踪精度低。因此如何将检测和跟踪算法结合起来,形成检测跟踪一体的探测过程,降低检测和跟踪误差,对于黑障区目标探测具有很大意义。我们提出了一种根据检测和跟踪之间互动反馈情况的反馈跟踪方法,传统的检测跟踪模式和反馈跟踪模式的流程如图9所示。
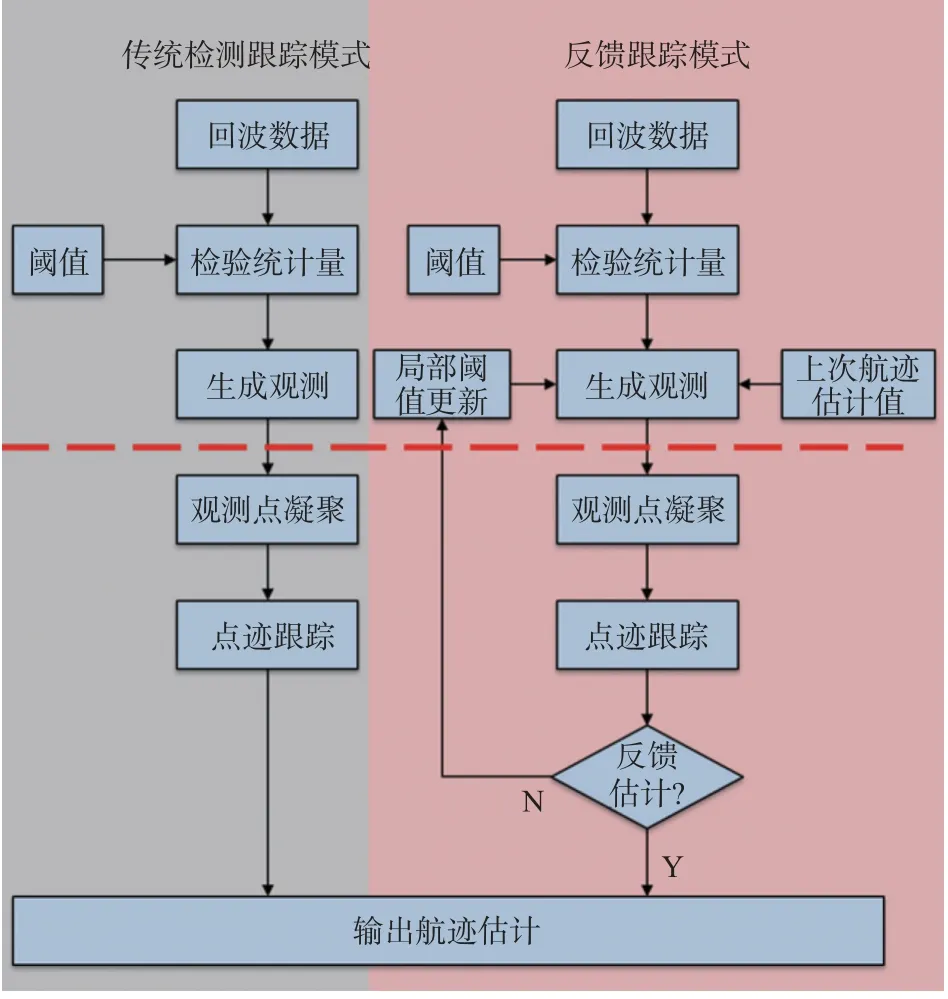
图9 无反馈跟踪模式和反馈跟踪模式流程Fig.9 Flow of the non-feedback and feedback tracking mode
无反馈跟踪模式工作流程由雷达进行目标检测生成观测点,将观测点输送给跟踪算法生成航迹估计结果,没有从跟踪算法到雷达目标检测的信息反馈。主要步骤为:
1) 根据雷达回波信息计算检验统计量。
2) 根据给定的阈值和检验统计量生成观测点。
3) 使用点迹凝聚算法对观测点进行凝聚。
4) 依据凝聚后的观测点运行点迹跟踪程序,生成航迹估计结果。
反馈跟踪模式由雷达进行目标检测生成观测点,将观测点输送给跟踪算法生成航迹估计结果,如果使用的观测点不是通过反馈获得的,则根据该估计结果反馈出新阈值,并生成新的观测点进行跟踪。主要步骤中,前3个步骤与无反馈跟踪模式相同,后续步骤为:
5) 依据观测点运行点迹跟踪程序,生成航迹估计结果。
6) 判断该航迹估计结果使用的观测是否是通过反馈生成的。如果是,则输出航迹估计结果;如果否,则执行下一步。
7) 根据航迹估计结果计算新的阈值,跳转至步骤2。
在跟踪算法中,针对检测虚警点多的问题,进一步可采用随机参数矩阵来描述可能的多种运动物理规律,构建随机参数矩阵多模型动态系统,描述目标运动和模型参数的不确定性,克服传统卡尔曼框架的局限性。图10为我们基于仿真数据在传统检测跟踪模式和反馈跟踪模式下给出的测距误差和跟踪误差对比,其中(a)分别是传统模式和反馈模式下的检测距离误差,(b)分别是传统模式和反馈模式下的跟踪距离误差。经仿真验证,反馈跟踪模式比无反馈跟踪模式的检测距离误差降低了35%以上,跟踪距离误差降低了20%以上。

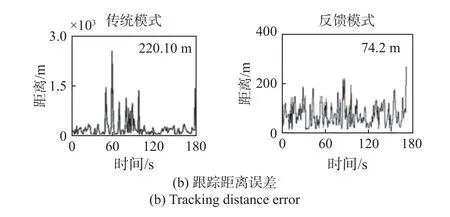
图10 无反馈跟踪模式和反馈跟踪模式距离误差对比Fig.10 The comparison of distance error between the nonfeedback and feedback tracking mode
4 返回舱黑障区认知探测技术
基于不同波形对目标、等离子体鞘套和尾流的探测性能差异,我们设计了航天返回舱目标黑障区认知探测流程,如图11所示,通过对航天返回舱目标特性、回波特征、环境特征实时认知和测距、测速、跟踪误差等性能的估计,乒乓迭代实时生成下一时刻的优化波形及对应检测跟踪算法,实现对航天返回舱目标自适应探测波形和处理优化设计。

图11 返回舱黑障区认知探测流程Fig.11 Flow of cognitive detection of reentry capsules in blackout
为了验证黑障区认知探测方法的效能,我们设计了实验室环境下返回舱目标信号级波形/处理/调度自主寻优实时闭环验证系统,采用线馈方式将模拟雷达功能的组件和目标模拟系统在射频端连接起来形成闭环。通过对航天返回舱目标再入场景的实时波形处理优化模拟,比较基于图像的检测方法和自适应波形认知探测方法的探测性能,结果如图12所示。由于传统方法的检测概率只有27%,无法形成连续跟踪轨迹,测量误差在图中无法显示,因此图中只有基于图像和认知探测方法的探测性能对比。可以看出,基于图像的检测方法和认知探测方法均可实现黑障段的跟踪,尤其是认知探测可将黑障段的测量和跟踪误差降低一个数量级以上,测距误差降低至10 m量级。具体结果如表1所示。
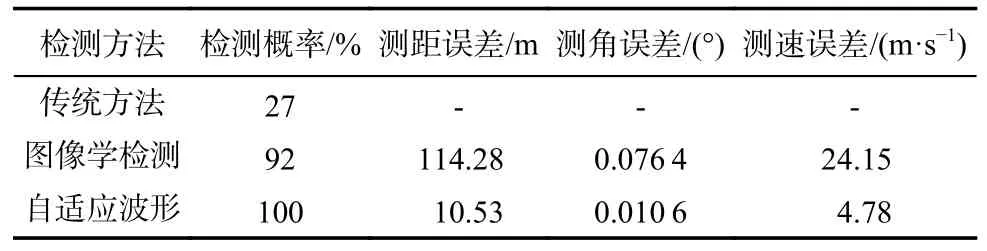
表1 三种方法黑障区探测性能统计Tab.1 The performance statistics of detection in blackout for three methods
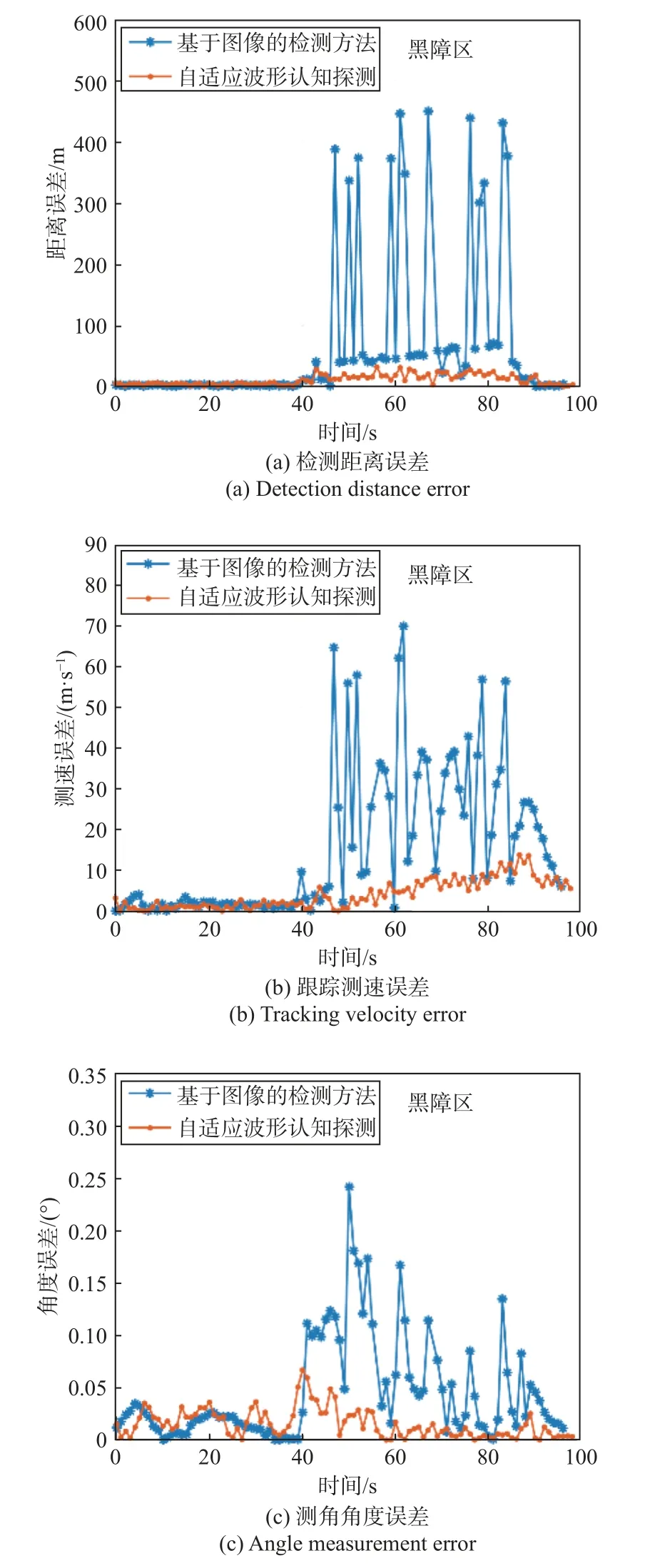
图12 基于图像的检测方法和自适应波形认知探测方法的探测性能对比Fig.12 Detection performance comparison between detection method based on image feature and adaptive waveform cognition detection method
5 应用及总结
本文提出的黑障区雷达探测的模拟仿真方法和航天返回舱黑障区认知探测技术从2020年“嫦娥五号”返回舱探测任务开始初步应用,并历经多次载人飞船返回舱探测任务不断迭代优化,目前已成功应用于多频段雷达装备中,大幅提升了雷达对返回舱黑障区的探测精度和跟踪稳定性,圆满完成“神舟十二号”至“神舟十五号”返回舱探测任务。其中以某型雷达探测“神舟十三号”为例,采用上述方法后黑障段目标高精度检测概率从36.9%提升至90.6%,与航迹拟合后对比,距离测量随机误差为11.19 m。
探测任务的成功标志着目前雷达已基本解决了返回舱黑障区探测问题。但随着我国空间站常态化乘组轮换和未来载人登月规划推进,载人飞船任务将保持高密度状态,本文提出的方法可继续为保障返回舱探测做出贡献,也可为未来新一代返回舱探测提供技术基础和应用经验。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
军事文摘(2022年12期)2022-07-13 03:11:16
空间科学学报(2021年6期)2021-03-09 06:19:58
现代塑料加工应用(2021年5期)2021-02-28 08:18:04
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
新农业(2017年2期)2017-11-06 01:02:23
太空探索(2016年5期)2016-07-12 15:17:55
太空探索(2016年7期)2016-07-10 12:10:15
火控雷达技术(2016年3期)2016-02-06 02:30:26
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34