
基于信标导引的目标方位估计方法
2024-04-01 02:38李欣然李小民古书铭
计算机测量与控制 2024年3期
李欣然,李小民,史 岩,古书铭
(1.河北工业大学 电气工程学院,天津 300401;2.珠海科技学院 电子信息工程学院,广东 珠海 519041)
0 引言
近些年,高龄老人迷路走失、儿童被拐失踪、突发灾害人员失联的案例屡见不鲜,发生这些情况后,如何对失联人员准确定位进而快速实施救援,避免发生意外和尽量减小伤害,是亟待解决的问题。以往采用发烟棒或灯光闪烁示警的方式,由于其作用距离近、持续时间短和遮挡地域可见性差等原因,户外救援效果不佳;而采用“卫星导航接收机+移动通信”的救援手段,当被救援对象跌倒或者在狭窄室内环境时往往会因为卫星信号被遮蔽而不能可靠定位;此外采用配备mini手机的救援方法也存在诸多使用限制,一是若被救援对象由于身体状况限制不能接听电话,就不能实现定位。二是被拐儿童若被发现拨打电话可能会导致更严重的身心伤害。因此,以上这些手段都不能很好地适合在保证被救人员自身安全前提下可靠实施搜索救援的需要。有鉴于此,非常有必要探索适合迷路老人、被拐儿童、户外探险驴友等合作目标快速救援需要,适应多种户外、室内环境要求,能够快速、准确进行测向定位的方法手段,进而保障救援工作的快速、准确实施。
1 系统结构及原理
论文研究了一种基于探测合作目标发出的信标信号,进而通过频谱分析来快速估计目标方位和距离的户外搜救导引系统,该系统综合采用模块化、嵌入式和便携式思想进行设计,力求满足野外环境下使用简便、操作灵活、指示直观等基本需求。系统组成结构如图1所示,该系统主要由无线电信标、信标信号定向接收机、磁罗盘、北斗导航接收机和监控计算机等组成。其中无线电信标配属于远端合作目标对象,它可周期性地发射无线脉冲信号。信标接收机利用自身的定向天线接收信标信号,磁罗盘用于测量方位,北斗接收机用来测量地理位置,监控计算机用来协调处理全系统的工作。采用图1所示的系统结构主要用于实现以下5项功能。

图1 系统组成框图
1.1 信标信号全向发射
远端信标配置有全向天线,具有360°全向发射无线脉冲信号的能力。而且信标具有微型结构,可很方便地隐蔽安装在合作对象上面(如安装在老人或儿童身上)。
1.2 信标信号定向接收
信标接收机配置有八木天线,具有定向接收能力。而且信标接收机还可将接收到的信标信号下变频为声频脉冲信号,以方便在户外环境通过声音的大小来判断所接收信号的强弱。当信标接收机定向天线的指向与信标信号的来向一致时,接收到的信号功率最强、声音最大,反之则弱。
1.3 信标信号数字化处理
通过声音大小来判断信标信号的强弱,进而确定信标信号的来向只能得到粗略、经验性的定性结果。而要得到准确、定量的方位信息,还需要对信标信号进行进一步的数字化处理。具体方法是将下变频后的声频脉冲信号输入到计算机,然后通过计算机声卡中的A/D模块进行采集并变换为数字信号,其后再通过FFT变换处理成为声谱信号,并以此进行频率、幅度等特征分析,进而获得表征信标位置的准确方位信息和概略距离信息。
1.4 信标信号扫描搜寻
无线电信标接收机安装在转台上(在野外也可手持式工作),在转台带动下可在360°范围内旋转,用来扫描搜寻信标信号。当信标接收机定向接收天线的指向与无线信标的实际方向接近时,声谱幅值逐渐增大。而当声谱幅值超过预先设置的探测阈值时,表明定向接收天线的指向与信标实际方向一致,亦即搜寻到了合作目标的方位。
1.5 信标方位精确测量和距离概略估计
在搜寻到合作目标方位的基础上,启动电子磁罗盘来定量测量定向接收天线的指向方位数据,该方位即为信标接收机所在点与待搜寻合作目标的指向角度;然后通过北斗卫星导航接收模块测量无线电信标接收机所在点的经纬度位置信息,再通过无线电波的衰减规律来概略估计合作目标距离信标接收机的距离。有了距离和方位两种信息就可给合作目标进行定位。
1.6 搜救路线实时导引
按照扫描搜索得到的合作目标方位信息,引导搜救人员进行快速搜救,并在电子地图上监测搜救路线,适时给予偏航修正引导;此外在搜救目标的过程中,可在不同地点再通过信标接收机测量合作目标的方位,以确保搜救方向的正确性。
系统工作时,微型无线电信标安装在老人或儿童等合作目标的身上(如装在衣服口袋里)。北斗接收机和磁罗盘与信标接收机固联在一起,而信标接收机又固定在云台上(应急使用时,信标接收机也可手持工作)。云台在监控计算机控制下可以在方位和俯仰两维平面上旋转。监控计算机可以采集信标接收机传输来的声波脉冲信号,并通过声谱分析来探测信标信号幅度最大值点的定向天线方位指向,而该方位的定量数据可由磁罗盘测量得到,进而可为搜救失联合作目标提供定量、准确的方位信息指引。
2 目标位置估计方法
目标位置估计方法的基本原理是“四结合”,亦即全向和定向相结合、定性测试和定量测试相结合、粗测和精测相结合、方位测量和距离估计相结合。其基本含义是无线信标在远端全向发送脉冲信号,在搜寻端利用信标接收机通过其定向接收天线来搜寻信标信号;搜寻过程中可通过声音大小来定性判别信标信号的方位和距离,又可通过数字化后的声谱幅值来定量判别信标的方位和距离;在定量检测信标方位过程中,通过快速粗扫描来概略搜寻信标信号的来向,接着在一定范围再通过低速精确扫描来锁定信标信号的方位;信标的方位可通过磁罗盘准确测量得到,而信标的距离可通过分析无线电波的衰减规律粗略估计得到。
该监控系统的设计,可保证变频器处在最佳的工作状态,不仅提高了变频器和负载电动机的工作效率,节省耗电量,而且方便操作人员实时查询变频器的工作状态,避免人工巡检工作时效性差的弊端[1-2]。
在本搜救系统中就是利用了这一目标方位位置方法来定量确定合作目标的位置,进而引导搜救工作的快速、准确实施。在搜救系统中,信标信号的传输过程如图2所示。定向接收天线通过SMA接口与信标接收机相连,用来传输高频信号。而信标接收机输出的下变频声波信号通过MIC音频接口输入计算机,接着再利用计算机内置的声卡来对该信号进行A/D采样处理。

图2 系统信号传输流程
在搜救系统中,无线电信标选用的是马歇尔追踪器信标,该信标通过锂电池供电,体积小巧可隐蔽安装在老人或儿童等合作目标身上。信标通过全向天线发射信号,该信号是频率为433 MHz、信号间隔为40 ms、脉宽为40 ppm的连续脉冲信号。发送天线的增益为4 dBd,在无遮挡地区的最远传输距离约为60 km。无线电信标接收机选用的是马歇尔的FM100型超外差追踪接收机,它具有5个波段。为了兼顾在城市和郊外环境都能稳定地接收到信标信号,本系统选择了432.000~435.999 MHz波段。该接收机的定向接收天线为折叠式八木天线,当天线对准信标方向时,接收信号幅度最强,反之幅度很弱。而在接收到信标信号后,信标接收机还将该信号下变频为音频信号,以方便用户在户外通过声音强度来判断信号的有无和强弱。
在本系统中,磁罗盘选用的是DCM260B型倾角补偿式三维电子罗盘,该罗盘采用5 V电压供电,方位测量精度为0.8°,采用RS232协议通过串口与计算机通信,且其小巧的体积可方便地与信标接收机的八木天线固联在一起。在实际使用时仅需提取电子罗盘在水平面内的方位角航向数据,滚转角和倾斜角数据可忽略。北斗接收机选用的是CodingCopper USB型北斗接收机模块,它实际上是支持BDS、GPS、GLONASS三个系统的组合式卫星导航接收机模块,具有搜星快速和定位可靠等典型特点。而且该模块的定位更新率默认为1Hz,定位精度2.5m,采用标准的MEA-0183格式协议输出数据并通过USB接口与计算机通信,满足本系统应用。
监控计算机可采用PC104便携式工控机、平板电脑或者笔记本电脑。其中PC104便携式工控机由于具有丰富的对外接口,系统性能可通过板卡升级而获得显著提升,非常适合户外搜寻领域;笔记本电脑的对外接口较多,通用性强,市场可选择余地大,也可应用在户外搜寻领域;但安装安卓等操作系统的平板电脑,由于对外接口少,处理器性能较弱,不太适合户外搜寻。在本搜救系统中,早期采用了笔记本电脑作为监控计算机,后期拟更换为专业性更强的PC104便携式工控机。
2.1 目标方位精确测量
为了能够准确、定量获得信标的方位信息,本系统又对音频脉冲信号进行了后处理。具体过程是计算机对从MIC接口输入的音频脉冲信号通过内置声卡进行采样(采样率为44.1 KHZ,采样位数为16 bit),然后再通过自编软件做FFT变换,转变成声谱信号并通过幅值-时间2维坐标显示。图3即为进行了FFT变换后得到的音频脉冲信号频谱图。

图3 音频脉冲信号频谱图
为了精确测量无线信标的方位数据,本系统通过圆周扫描方式来控制云台的旋转,以此实现固连在云台上的信标接收机对信标信号进行周期性地扫描探测。当实时采集的信号声谱强度超过预先设定的阈值时,就表明信标接收机的定向天线指向了信标所在的方位,接着再利用磁罗盘精确测量并记录定向天线当前的指向数据,该数据即为信标的方位数据。
为了能够在环境噪声背景下对信标信号进行可靠地检测和准确判别,本系统采用了多组平均声谱强度值来和阈值比较的方法,来消减随机环境噪声对正常信标信号的影响。具体做法是在每个方位点上采集150个信号样本的声谱值,然后每50个信号样本为一组再做算术平均,进而得到3组平均的声谱强度值。在一个方位点上只有当3组平均声谱强度值均超过了阈值,才表示真正找到了信标的方位,搜寻状态就由“目标搜寻”转为“目标锁定”。 需要说明的是,在实际使用时不能将阈值设置的太低,否则可能在多个方向上都能锁定目标进而失去定向的作用。图4为搜寻信号的状态界面,其中的瞬时能量为实时采集得到的单次信号声谱幅值,而累计能量即为算术平均后的平均声谱幅值。
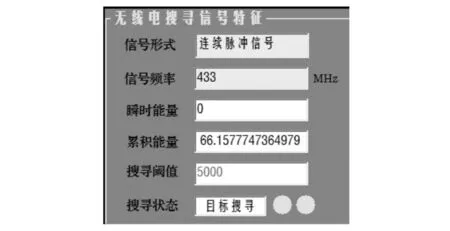
图4 搜寻信号状态界面
为了提高目标搜索的快速性和精确性,本系统设计了两种扫描模式:一种是粗略快扫描,即以较大的步长,如5°/s或10°/s,在 0~360°范围内进行快速扫描搜索信标信号。另一种是精确慢扫描,即当以快扫描粗略搜索到信标信号时,再在该信号指向附近以较小的步长,如1°/s或2°/s,在±10°范围内精细的搜索信标信号,以保证对信标方位的精确定向。此外,在户外搜救时,也可采用手持信标接收机模式进行360°转圈扫描搜索,通过听声音强弱来概略估计信标的方位。图5为云台扫描控制界面,图6为信标信号扫描显示界面,图7为信标方位扫描搜索流程图。

图5 云台扫描控制界面

图7 信标方位扫描搜索流程图
在图5的云台扫描控制界面中,当云台被安放在地面平坦场地时,一般仅在水平方向旋转扫描;而当云台被安放在楼顶、山头等具有一定高度的地点时,可下俯一定的角度,如0°~ -10°,然后再在水平方向旋转扫描。若长时间接收不到信标信号,俯视角度就需进行步进式调整。在图6的信标信号扫描显示界面中,不同同心圆的半径是以表征不同距离的阈值来设置的,这样若能探测到信标信号,就可很直观的估计出其概略距离。
2.2 目标距离概略估计
无线电信号在空间传输时,信号功率随着传输距离的增大而逐渐衰减,其衰减规律如式(1)所示。利用该衰减规律,在接收端通过检测接收到的信号功率,就可概略估计出合作目标与信标接收机之间的距离。
(1)
在本搜救系统中,主要通过设置接收信号的阈值来估计接收到的信号功率,进而估算合作目标与信标接收机之间的距离。
这里阈值表示两种含义,一是表示在背景噪声中识别出信标信号的最小接收信号幅度,二是表示信标与接收机之间的概略距离。由于信号传播衰减、场地环境遮挡、环境干扰等的差异性,信标在不同距离点处发射全向脉冲信号,远端信标接收机通过定性天线接收到的信号强度大都不一样,因此采用固定的探测阈值显然不合适。为此,在搜救系统中采用了与距离关联的试探式多阈值设置方法,并通过两个阶段来确定阈值。一是事前阈值标定。事先在不同的场地环境(如郊区原野、市内、丘陵山地等等),在距离接收机不同距离点处放置信标(如1 km、2 km、3 km、5 km、8 km、10 km等),然后记录接收机接收到的信号幅度值数据,接收多组数据并采用算术平均法得到不同距离点的平均幅度值,进而将该幅度值设置为探测阈值,并用来作为估算信标与接收机之间距离的概略标准;二是试探式阈值切换。系统工作时,为保证既能探测锁定信标信号又能估算出距离,采用步进式试探方式来切换阈值。即先以较小的阈值来探测信标信号,若能检测出信标信号并可靠锁定,就再逐次切换为大一些的阈值,直到基于当前阈值信标信号不能可靠锁定为止。亦即先通过设置较小的阈值来探测信标信号的有无,然后在能可靠锁定信号的基础上,试探式地再逐步增大阈值,利用能保持锁定的最大阈值来估计信标与接收机之间的距离。需要说明的是,实际使用时,由于环境条件可能发生较大变化,距离估计误差可能较大。
2.3 干扰野值剔除
在系统工作过程中,接收的信标脉冲信号由于偶然因素(如磁暴、非正常天气等)以及环境干扰等会产生随机的幅值极大值点,往往会由于超过了阈值而被误判定为搜寻到了目标,此即为野值。野值的出现往往会造成误判,导致搜寻的可信度下降,因此必须将其剔除。鉴于野值的出现具有突发随机特点,本系统采用了两种剔除方法。
2.3.1 基于算数均值的野值剔除
当接收信号的幅值极大值点出现时,云台停留在该点方向,接收机采集3组数据(每组50个采样值)并计算其算数均值,若均值小于阈值,则判定为野值,云台再启动扫描旋转,继续搜寻目标;若均值大于阈值,则判定为搜寻到了目标,可再转为慢扫描状态精确搜寻目标。实际工作时,为判定野值而采集信标信号的样本数可适当大一些,因为有时野值很大,利用较少的样本计算出的均值也可能超过阈值,从而会造成误判。具体采集样本的数量,可采用事前到不同的场地进行实测来估算得到,一般情况下采集3组信标信号样本都能较好地剔除野值。
2.3.2 基于信标特征的野值剔除
在本系统中,信标发出的脉冲信号间隔为40 ms,信标接收机接收到该脉冲信号后,下变频成间隔为1 s的声频脉冲信号,它是固定周期信号。而随机的干扰信号不具有这种固定周期特征。因此,当第一次接收信号的幅值极大值点出现时,云台停留在该点方向,采集10 s内幅值极大值点出现的次数,若次数少于10次就判定为野值,否则判定为搜寻到了目标。
系统实际工作时,可先采用基于信标特征的野值剔除方法来处理疑似的野值数据,然后再采用基于算数均值的野值剔除方法加以核实验证。
3 系统测试
通过将微型无线信标、信标接收机、电子磁罗盘、卫导接收机和监控计算机等硬件进行综合集成,并结合模块化软件设计手段开发了集信标信号全向发射、信标信号定向接收、数字化采集处理和声谱分析、信标方位精确测量和距离概略估计于一体的合作目标搜救导引系统,系统样机如图8所示。

图8 系统样机
系统测试的基本原理是利用系统样机,在远郊田野和城市街边两种环境,将信标接收机放置于固定点位,而将无线信标放置于不同距离的测试点位,然后就信标接收机接收信号后的锁定情况、方位角定量测量情况和距离估计情况分别进行测试,以此来评估系统样机的可用性和目标位置估计方法的可行性。
具体的测试步骤规划如下:将信标接收机放置于事先选好、周围遮挡物较少的固定点,必要时可放置于楼顶。而将无线信标分别放置于15 km范围内、以0.5 km或1 km为径向间隔、以45°为角度间隔的不同测试点来进行测试实验(间隔距离可通过卫导接收机的经纬度数据来推算,间隔角度可通过磁罗盘测量得到)。测试地点分布示意图如图9所示。图9的中心点放置信标接收机,每个黑点即为测试点,用于放置无线信标。而且最内测圆距离中心点的距离为5 km(郊区环境)或2 km(城市环境),相邻圆之间的径向距离为1 km(郊区环境)或0.5 km(城市环境)。不失一般性,为了简化测试步骤,测试点主要在水平方向和垂直方向各自选择了5个点位,在45°角方向选择了2个点位,在135°角方向选择了1个点位。而且水平方向和垂直方向也并不是严格的地理0°和90°。实际测试时,在郊区环境,通过电子罗盘测试选择了10°航向角作为水平方向,城市环境选择了30°航向角作为水平方向。
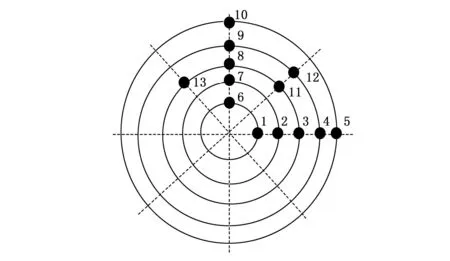
图9 测试点分布示意图
测试时,不同距离的检测阈值根据阈值标定阶段环境测试的结果来设置,设置的主要依据是在环境噪声背景下保证能够在合作目标方向上检测并锁定信标信号。
两种环境中信号锁定情况测试结果分别如表1和表2所示,方位和距离测试结果分别如表3和表4所示。

表1 郊区环境信号锁定情况测试结果

表2 郊区环境方位和距离测试结果
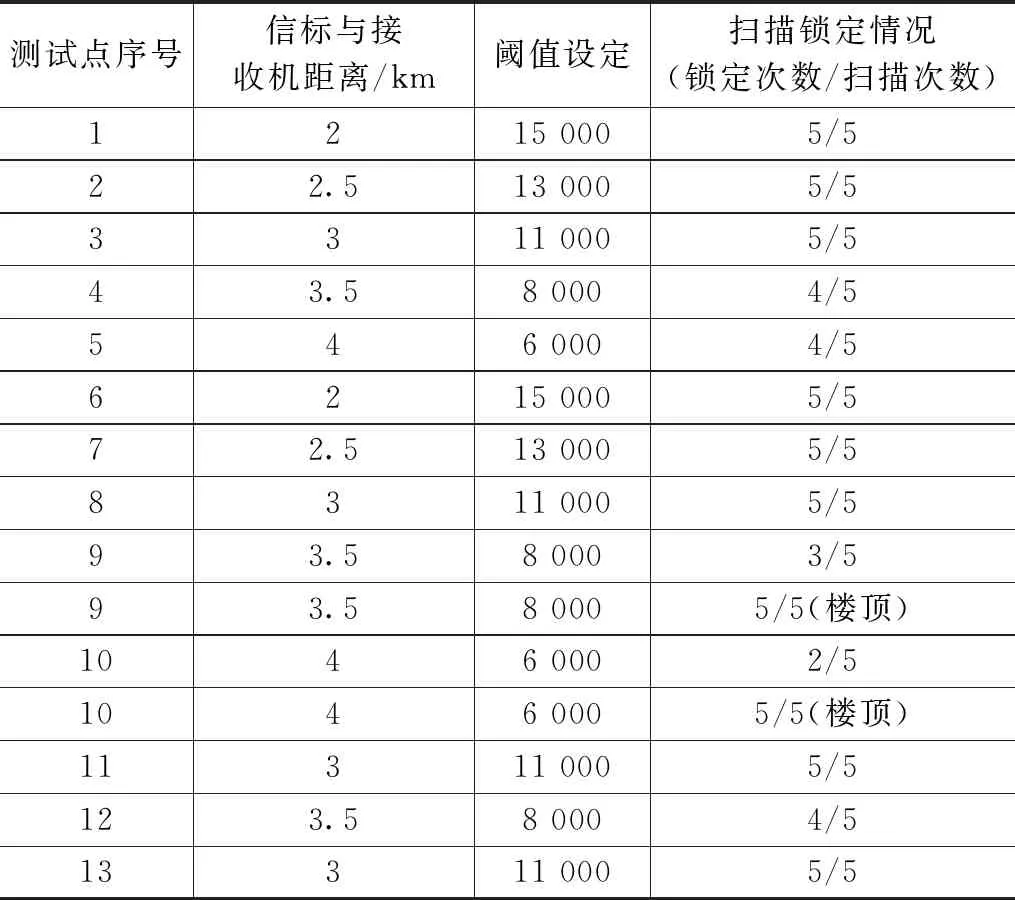
表3 市区环境信号锁定情况测试结果
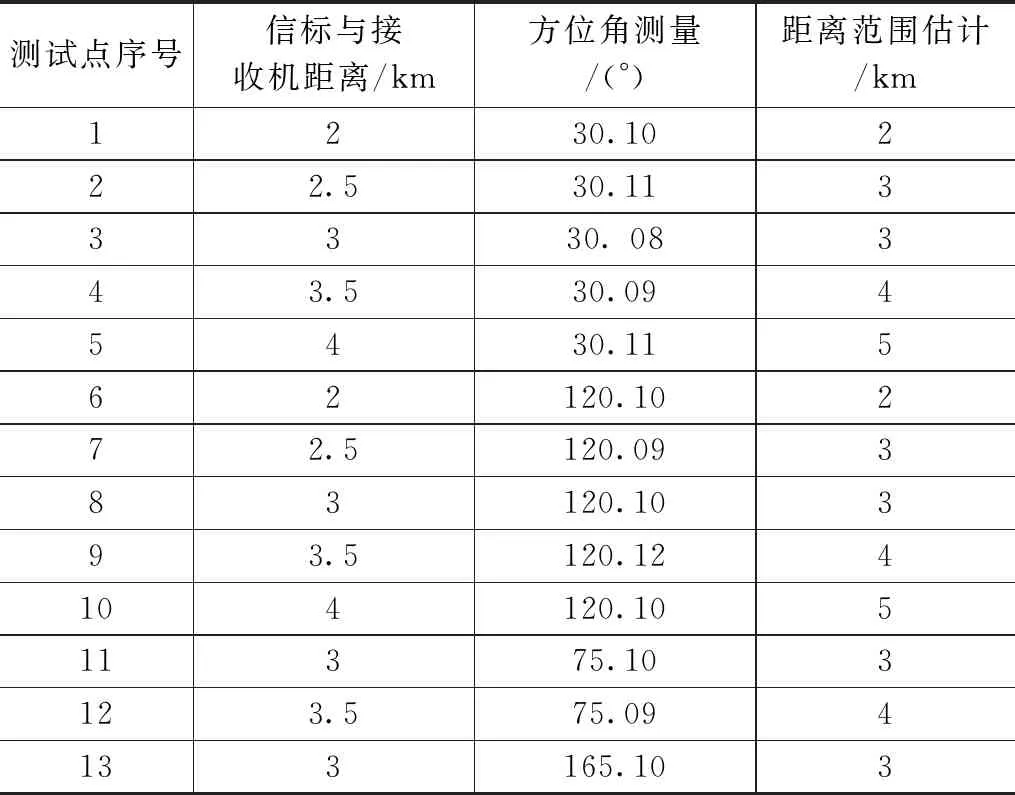
表4 市区环境方位和距离测试结果
由表1和表2可见,在郊区环境由于遮挡物较少,地面比较平坦,无线信号直线传输比较顺畅,阈值设置的较大;而在城市环境,鳞次栉比的高大建筑物对无线信号遮挡严重,因此在相同的距离上阈值设置的小一点。而且测试结果表明,在远郊平坦的田野环境下,10 km以内都能稳定地接收并锁定信标信号,进而可测量其方位。超过10 km后接收信号的稳定性变差,有时由于信号太微弱而不能锁定;在城市环境由于建筑物的遮挡,在地面5 km以内能稳定接收并锁定信标信号,进而也可测定其方位。超过5 km后接收信号的品质逐渐变差,锁定信标信号的次数逐渐降低。而若将信标接收机架设到高楼的楼顶,信号的接收情况明显改善,10 km以内都能稳定地接收并锁定信标信号。
由表3和表4可见,在对信标信号保持稳定锁定的情况下,启动电子罗盘即可测量定向天线的磁航向角,该角度也就是信标接收机与合作目标连线的方位角。本文所选电子罗盘的航向角精度为0.8°,角度分辨率为0.1°,其精度指标满足户外搜寻的需要;距离估计值,主要是利用信号锁定情况下的最大阈值来概略估计,由于无线信号传输环境的不确定性,测试中仅仅对信标接收机与无线信标之间的距离范围进行了估计,并不是精确的直线距离。测试结果表明距离范围估计值与实际的直线距离比较吻合。满足户外搜索救援的基本需要。
4 结束语
通过对信标信号进行FFT变换处理,进而依据频谱幅值与阈值的比对结果来搜寻并锁定信标信号,保证信标接收机的定向天线稳定指向合作目标所在的方向。在此基础上再通过电子罗盘和北斗接收机来定量测量合作目标的方位,并概略估计其距离。这种方法在郊区环境和城市环境都能较好地适应对合作目标快速搜救和探测导引的需要。
但测试结果表明,在郊区遮挡物较少的环境,可在较大的范围内进行探测搜救。而在城市环境,遮挡物多,环境噪声复杂,能实施可靠探测搜救的范围明显减小。可以预测,若将信标接收机放置于无人机上,地面遮蔽物的影响会显著减小,搜索到地面信标信号的概率会明显增大,能更好地满足大范围、快速准确搜救的需要,使用场景也会更广阔。
猜你喜欢
电光与控制(2022年4期)2022-04-07
上海航天(2018年4期)2018-09-07
铁道通信信号(2018年3期)2018-04-19
兵器装备工程学报(2017年9期)2017-09-28
作文·初中版(2017年2期)2017-03-06
电子设计工程(2017年20期)2017-02-10
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
新闻传播(2015年9期)2015-07-18
发明与创新(2015年25期)2015-02-27
水道港口(2015年1期)2015-02-06
