
含时延的车辆队列事件触发一致性控制研究
2024-04-01 02:38施丽佳陈珍萍景苏川
计算机测量与控制 2024年3期
施丽佳,陈珍萍,2,贺 文,景苏川
(1.苏州科技大学 电子与信息工程学院,江苏 苏州 215009;2.苏州智慧城市研究院,江苏 苏州 215009)
0 引言
车辆队列(Vehicle platoons)旨在使每辆车保持与队列内其它车辆一致的速度,同时保证队列稳定性及合理的安全距离[1-2],对缓解交通拥堵、提升道路通行效率、提高道路安全性以及降低油耗等有着重要的作用。
车辆队列控制问题受到国内外广大学者的广泛关注。在2015年,文献[3]将车辆队列分解为4个相关联的部分,即节点动力学(ND,node dynamics),车辆几何间距模型(FG,formation geometry),信息流拓扑结构(IFT,information flow topology)以及分布式控制器(DC,distributed controller),简称为“四要素”框架法。在这个框架下,研究人员从不同方面分析了车辆队列的问题。针对横向动力学和执行器饱和的情况,文献[4]提出了一种能够快速形成安全、稳定车辆队列的分布式控制器;考虑到车辆队列行驶中除了有纵向间距,还有由于换道超车等必要的车辆行为产生的侧向间距,文献[5]提出了一种综合考虑纵向间距和侧向间距的控制器设计,并得到实现车辆队列稳定性的条件;文献[6]研究了信息流拓扑对队列的影响,并利用特征值分析方法得出了几种常见的拓扑结构的内部稳定性条件。尽管车辆队列控制已经被广泛研究,但是由于车辆自身设备以及周围环境的影响,车辆队列通信拓扑[7-8]、执行器饱和[9-11]、通信时延[12-14]等对队列的稳定性造成了极大的影响。
在车辆队列控制中,车辆间通信网络的拥堵、受限的传输速度等,都会导致车辆间信息交互的通信时延,进而导致车辆队列系统的稳定性下降,甚至造成车辆的碰撞[15-18]。通信时延根据类型可分为固定通信时延[15-16]和时变通信时延[17-18]。针对固定通信时延,文献[15]提出了一种考虑车头时距和固定通信时延作用下的车辆跟踪模型,并且研究了时变矩阵扰动下的队列指数稳定性及鲁棒稳定性;文献[16]研究了一种动态不确定、固定通信时延一致的异质车辆队列的控制方法,同时对队列的稳定性及性能进行了理论分析。针对时变通信时延,文献[17]考虑车辆队列系统在时变通信时延下提出了一种分布式控制算法,该算法保证了在时变非均匀时延下的车辆队列一致性;文献[18]针对智能网联车辆的轨迹跟踪问题,考虑了车辆之间的通信时延和跟驰行为,提出了一种分布式非线性轨迹跟踪控制器,该文献分别在无时延、同质时延和异质时延的3个场景下对车辆队列进行了仿真验证,验证了所提控制器的有效性。上述所列的文献中所设计的控制器,其控制输入的更新大都是连续的。从通信网络资源利用角度来看,系统一直处于运行状态下,这就造成了不必要的通信资源浪费、信息冗余。
与连续实时控制和采样控制不同的是,事件触发机制能够减少控制输入的更新频率,减少计算资源、设备资源以及通信资源,已在车辆队列一致性控制中得到应用[19-24]。文献[19]为了减少车辆行驶过程中多辆车频繁通信带来的能量消耗,提出了一种基于事件触发机制的智能车辆编队控制算法;文献[20]研究了带有动态领导者的二阶多自主体系统领导跟随一致性问题,在分布式事件触发机制下的二阶系统下,得到了基于事件触发机制的多自主系统协同运动的收敛条件,以便提高系统的通信效率和能源利用率,减少多自主体系统硬件资源的浪费;文献[21]针对多智能体间信息通信量大的问题,提出一种事件触发控制策略来研究了三阶多智能体系统在有向固定拓扑下的一致性问题;文献[22]为了降低控制器的更新率,提出了一种具有两种不同触发条件的事件触发控制方案,并且在双向跟随式通信拓扑(BD)和双前车跟随式通信拓扑(TPF)下车辆队列能够实现串稳定性;文献[23]为了有效避免连续通信,减少系统的能量耗散,设计了一类基于辅助动态变量的完全分布式事件触发控制策略,所提控制协议和触发函数不会依赖通信拓扑结构,也不会涉及邻居节点的实时状态信息,且策略具有参数少、易调等特点;文献[24]为了进一步节省资源,研究了具有时变控制器故障系统的车辆队列容错控制问题,通过获取相邻车辆的相对状态信息,设计了两种事件触发容错控制器,且通过李雅普诺夫理论证明了控制器的有效性。然而,现有基于事件触发的车辆队列控制算法,大都是在假设通信网络理想且不受限的条件下进行的,忽略了通信环境受限对车辆队列控制的影响。
此外,上述对车辆队列的研究中,没有考虑车辆之间的非线性运行耦合的相互作用,这可能会导致不合理的加/减速度行为。文献[25-27]考虑了车辆之间的跟驰行为:文献[25]为了捕捉车辆的非线性行为,考虑跟随车辆的相互作用的影响,提出了一种用于异质车辆队列的分布式非线性控制,所提控制器可以避免负速度、负间距误差和不合理的加速/减速行为;文献[26]通过结合车辆队列之间的一致性和跟车的相互作用,提出了一种非线性纵向控制器,不仅保证了队列的稳定性,还可以避免车辆的追尾行为;文献[27]也考虑了车辆非线性运动耦合的相互作用,提出了一种基于可变时距策略的队列控制器,所提控制器可以有效调整车辆之间的间距,并且可以有效解决车辆队列运行时出现的负速度差。因此,本文在控制器中也采用了车辆跟驰行为函数。
在文献[12-13]和[25-26]的基础上,针对具有三阶动力学模型的异质车辆队列,研究考虑通信时延的事件触发车辆队列控制器设计,主要创新有:
1)引入事件触发机制并设计异质触发方程,推导出控制器稳定时触发参数满足的条件,利用Lyapunov-Krasovskiis定理求解得出了通信时延的上界,以此保证了车辆队列的稳定性。
2)为了避免在行车过程中出现负的速度差以及车辆的不合理加/减速度行为,所设计的事件触发控制器还考虑了车辆的跟驰行为作用,进一步提高了车辆队列系统的行车安全。
1 问题描述
本节主要介绍相关数学符号、通信拓扑、图论知识、动力学模型及几个重要引理。
本文的相关符号说明如下:实数域和复数域分别用R和C表示,对于复数S∈C,其实部和虚部分别由Re(s)和lm(s)表示。A∈RN×M表示N×M的实矩阵,AT是A的转置,det(A)表示矩阵A的行列式;当对称矩阵A∈RN×N,对于任何非零矩阵x∈RN有xTAx>0,则称A为对称正定矩阵。‖·‖2为向量的2范数。维度N的零矩阵和单位矩阵分别由0N和IN表示。
1.1 通信拓扑和代数图论
如图1所示的场景中,考虑N+1辆车在道路上以队列的形式朝同一方向行驶。其中,li(i=1,2,...,N)表示车辆i的车身长度,车辆i通过V2V通信技术与队列中的任一辆车进行位置p、速度v、加速度a的状态信息交换,同时通过车辆上所搭载的距离传感器获取与前车的间距di,i-1。
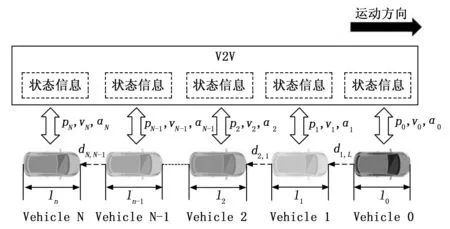
图1 车辆队列通信拓扑图
若对于任意两个不同的节点i和j,都存在起始于i终止于j的通信路径,则可称有向图G是强连通的。假设节点i在图G中存在达到其余节点的路径,则节点i是全局可达的。对于节点i,达到任意其他节点都存在有向路径,则节点i称为根节点,有向图G包含有向生成树。
1.2 车辆动力学模型
考虑一个由N+1≥2辆车辆组成的车辆队列,车辆队列中包含一个i=0领导车辆和i(i=1,2,...,N)辆跟随车辆。每辆车的纵向动力学可以通过以下三阶积分器模型表示[28]:
(1)
式中,pi(t),vi(t),ai(t)分别表示车辆i的位置,速度和加速度;ui(t)表示车辆i的控制输入;ζi刻画了每个车辆的动力系统的惯性延迟时间;对领导车0而言,假定a0(t)=u0(t)=0,也即领导车处于匀速行驶状态。
车辆队列控制目的是保持车辆队列中的每个车辆能够以相同的速度和车辆间距行驶。基于一致性理论,车辆队列控制目标可以描述为:
pi(t)→p0(t)-di0
vi(t)→v0(t)
ai(t)→a0(t)
(2)
其中:di0=i×(l+d)-l,l表示车辆的长度,d是相邻车辆所需的纵向安全车间距。车辆队列稳定时的位置、速度和加速度误差可以定义为:
(3)
根据上式,车辆队列控制目标(2)可以写为:
(4)
1.3 相关引理
引理1[29]:对于任意向量a∈Rm,b∈Rm和任意正定矩阵Ξ∈Rm×m,存在以下不等式:
2aTb≤aTΞa+bTΞ-1b
(5)
引理2(Lyapunov-Krasovskiis定理[30]):考虑如下系统:
(6)
其中:xt(θ)=x(t+θ),∀θ∈[-τ,0],且f(t,0)=0。令C([-τ,0],Rn)为Banach空间的连续函数,定义域为[-τ,0],且‖φ(θ)‖c=maxθ∈[-τ,0]‖φ(θ)‖。则对于系统(6),有如下稳定性理论:有Φ1,Φ2和Φ3都为连续且非负的递增函数,对于任意s>0都满足Φ1(s)>0,Φ2(s)>0,Φ3(s)>0,且Φ1(0)=Φ2(0)=0;对于系统(6)存在连续函数V(x(t))满足条件:
Φ1(‖x‖)≤V(x(t))≤Φ2(‖x‖),t∈R,x∈Rn
(7)

引理3[31]:设三阶系统的特征多项式为:
f(s)=s3+s2(Re(z1)+jlm(z1))+s(Re(z2)+
jlm(z2))+(Re(z3)+jlm(z3))
(8)
其中,z1,z2,z3为复数,则系统矩阵Hurwitz稳定的必要条件是f(s)中各项系数构成的主行列式的各阶主子式D1,D2,D3为正。
2 事件触发控制器设计与稳定性分析
本节将对车辆队列控制器的设计、事件触发机制的设计以及稳定性的分析进行表述。
2.1 控制器设计
在车辆队列系统中,由于周边环境的干扰,使得车辆在进行信息传递时会存在通信的延时,同时为了使车辆满足交通流理论和车辆队列控制原理,考虑车辆的长度、车辆的间距、车辆的信息一致性,以及车辆的跟驰行为特性,设计如下连续时间控制器:
kv(vi(t-τ)-vj(t-τ))+kp(pi(t-τ)-
pj(t-τ)+dij-v0(t-τ)τ)+ka(ai(t-τ)-
aj(t-τ))]-Pi0[kvvi(t-τ)-v0(t)+kp(pi(t-τ)-
p0(t)+di0-v0(t-τ)τ)+ka(ai(t-τ)-a0(t))]
(9)
其中:α>0,kp>0,kv>0,ka>0为车辆反馈控制增益;aij∈{1,0}和Pi0∈{1,0}分别是车辆i与车辆j以及领导车0之间的通信连接;dij=(i-j)(d+l)-l是车辆i和车辆j之间的期望间距,τ为车辆之间的通信延时;受文献[32]启发,本文采用最优速度Vi(Δpij(t))描述车辆i和车辆j之间的跟驰行为:
(10)

(i≠j)为考虑跟驰行为时的车辆行驶平均间距。
跟驰行为(10)的一阶泰勒展开式写为:
(11)

(12)
(13)
2.2 事件触发机制设计
对三阶动力学系统(13),给出基于事件触发机制的一致性控制器:
(14)

(15)

(16)
将测量误差函数(15)和控制器(14)代入三阶动力学系统(13),可得到:
(17)
对一个具有N辆跟随车辆的车辆队列系统,可得如下矩阵形式:
(18)

2.3 稳定性分析
本节从不考虑通信时延和考虑通信时延两方面来分析车辆队列的稳定性。当不考虑通信时延时,可以得出触发参数βi满足的条件;再考虑通信时延,得出通信时延的上界。本文关于触发方程的设计和通信时延的上界的主要结论分别如定理1和2所示。
在(18)中,首先不考虑通信时延的影响。当τ=0时,系统(18)可写为:
(19)
其中:
A0=J1+J2=
定理1:在控制协议(14)和触发函数(16)的作用下,当满足引理3的条件,并且触发参数满足:
(20)
则基于事件触发机制的车辆队列系统(19)可以实现一致性渐近稳定。
证明:在式(19)中,根据引理3和文献[25]可知,若A0为Hurwitz稳定,根据Lyapunov理论,则存在M∈R3N×3N>0,使得MA0+A0TM<-Q,其中,矩阵M,Q均是正定的,且M矩阵为对称阵,有M=MT。
选取Lyapunov函数为:
(21)
对V关于时间t求导,有:
(22)
e(t)TMe(t)
(23)
如此可将式(22)写为:
(24)
式(24)中,令

(25)
根据Comparison Principle[34],可以得到:
(26)


(27)
证明:系统(18)的Lyapunov函数可以写为:
由于
(28)
系统(18)可以改写为:
(29)
因此,令J=J1+J2,那么有Lyapunov函数:
(30)
根据引理1,可将更新后的Lyapunov函数中部分式子缩放为:
(31)
(32)
(33)
将上述3个不等式代入式(30),可得:
(34)

(35)
将式(35)代入式(34),可以整理得到:
(36)
其中:
根据事件触发函数(16),有:
(37)
同理,根据引理2和积分中值定理,式(37)可以改写为:
(38)

3 数值仿真
为了验证所提控制算法的有效性,本小节在MATLAB环境中进行了数值仿真验证,车辆之间的通信拓扑结构采用前车领导跟随式(PLF)的方式。
3.1 仿真场景设置
选取n=8辆跟随车辆以及1辆领导车辆作为实验对象进行数值模拟。领导车辆初始位置和加速度分别设计为p0(0)=0 m,a0(t)=0 m/s2,跟随车辆的初始状态设置为pi(0)=(n-i)×3dm,vi(0)=0 m/s和ai(0)=0 m/s2。控制参数及车辆结构参数见表1,计算得到时延上界τmax=0.3 s。
表1 控制器参数
3.2 仿真结果与分析
算例1:在τ=0 s时,设置领导车辆的速度为v0(t)=10 m/s,验证了本文所提的基于事件触发机制的车辆队列一致性控制器的有效性,在领导车辆保持速度不变时,车辆队列能够实现一致性稳定。
图2(a)(b)(c)反映了在上节设置的参数条件下,没有进行事件触发的车辆的位置、速度及加速度的跟踪情况,可以看出队列内所有跟随者在行驶过程中可以满足最基本的安全要求,不会发生碰撞现象,并且所有跟随车辆的速度都能够收敛到和领导车辆速度一致。
图2 无事件触发的领导车速度不变的车辆队列跟踪性能
图3(a)(b)是在事件触发机制下领导车辆做匀速行驶时车辆队列的跟踪性能,其中,图中的实点表示事件触发的时刻点,可以看到满足定理1的条件时,跟随车辆可以与领导车辆保持一定的安全距离,并能够实现跟随-领导者车辆队列的稳定性;由于本文设计的控制器还考虑了车辆的跟驰行为,可由仿真图2(b)和3(b)看出,车辆队列中的所有车辆均没有出现负的速度跟踪误差。
图4展示了跟随车辆的测量误差,可以看出测量误差的幅值会随着系统的稳定逐渐减小;图5给出了跟随车辆在事件触发机制下的时刻点,也就是每个跟随车辆传输自身状态信息的时刻,从图中可以看出,事件触发时刻点不是连续分布的,且在有限时间内不是无限触发的,这就表明本文所提的事件触发控制策略可以有效减少车辆之间的通信次数,从而减少通信资源的浪费,在控制器的更新信息上有优越的性能。
图4 跟随车辆的测量误差及阈值变化趋势
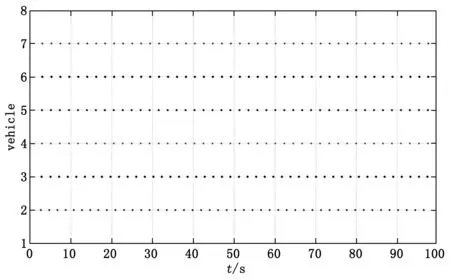
图5 跟随车辆的触发时刻点
算例2:在τ=0时,考虑车辆在队列行驶中会存在加/减速度的行为,设置领导车匀速变化的速度为:
进一步验证本文所提控制器的有效性,在领导车辆变速运动时,车辆队列仍然能够保持稳定性。
图6(a)(b)(c)展示了领导车辆存在加/减速度行为行驶时无事件触发的车辆队列的跟踪性能,可以看出车辆队列不会碰撞,且由图6(b)可知,领导车辆的运动状态分为了加速、匀速和减速3个阶段,最终所有跟随车辆的速度会逐渐收敛为与领导车速度一致,加速度也能够收敛到0 m/s2。
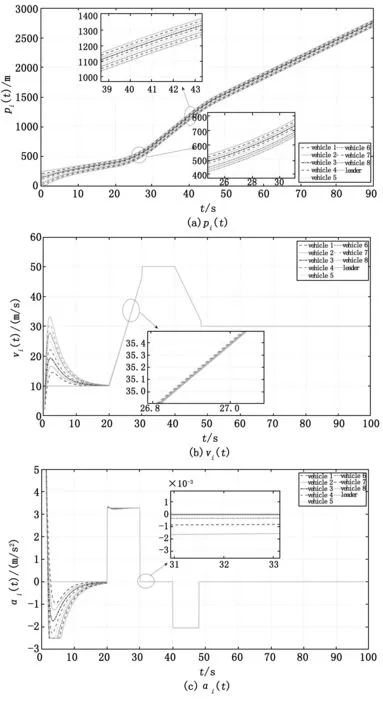
图6 无事件触发的领导车速度匀速变化的车辆队列跟踪性能
图7(a)(b)展示了在事件触发条件下领导车辆速度时变的车辆跟踪性能,同样,图中的实点表示事件触发的时刻点。图7(a)表示车辆队列中所有车辆的位置信息,由图可知在满足定理1的条件时,跟随车辆与领导车辆能够保持一定的安全间距,车辆队列可以实现稳定性;由图7(b)车辆的速度曲线图可知,跟随车辆的速度最终都能够与领导车辆的速度保持一致。
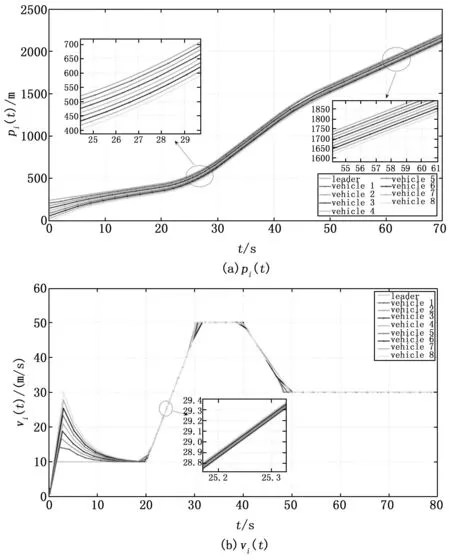
图7 在事件触发下的领导车速度匀速变化的车辆队列跟踪性能
图8表示了跟随车辆的测量误差,由图中看出在初始阶段误差的值比较大,直到车辆队列系统趋于稳定时,测量误差的幅值也在不断减小;图9表示了跟随车辆队列在事件触发机制下的时刻点。可以看出在事件触发机制作用下,控制器的传输时刻点是零星分布而不是连续的,并且每个车辆的事件触发时刻以及触发间隔都不相同,因此,可以得出本文所提的事件触发控制策略能够明显减少控制器的更新频次进而能够使系统减少通信资源的浪费。
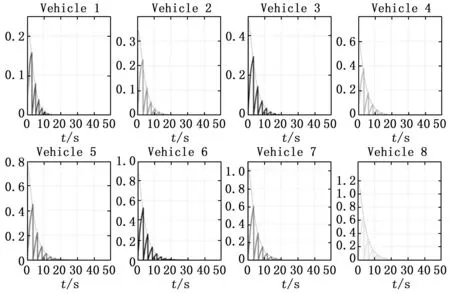
图8 跟随车辆的测量误差及阈值变化趋势
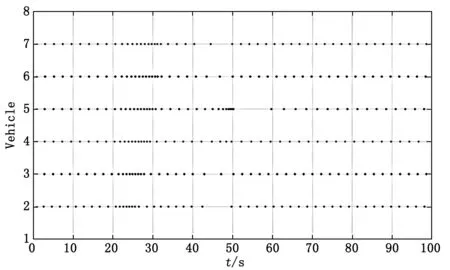
图9 跟随车辆的触发时刻点
算例3:当τ=0.1 s时,时延不超过最大时延,考虑在事件触发机制下领导车辆速度变化行驶的情况,设置领导者车辆的速度与算例2的速度相同,验证了存在通信时延情况下车辆队列在事件触发机制下仍然能够保持稳定性。
图10是在事件触发机制下τ=0.1 s的车辆速度曲线图,从图10中看出所有跟随车辆的速度最终都能够与领导车的速度趋于一致,同时,图10速度没有出现负的位置误差和负速度的行为,表示考虑的跟驰行为是有效的;与图7(b)相比较,当τ=0.1 s时的跟随车辆的速度会产生波动,这是由于车辆在传输信息的过程中存在了通信时延的影响,但最终所有车辆都趋于了稳态。因此在满足定理2的条件时,车辆队列能够实现稳定性。
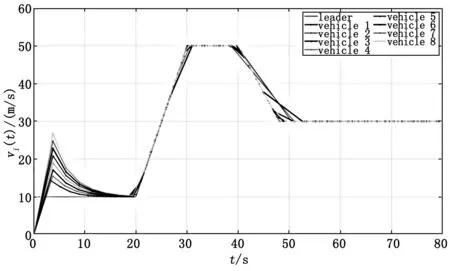
图10 事件触发下τ=0.1 s的车辆速度曲线
图11是在事件触发机制下τ=0.1 s时的跟随车辆的触发时刻点,从图中看出触发时刻点不是连续的,表明存在通信时延的事件触发在减小能量的消耗和控制器的更新频率上是有效的且存在通信时延的控制器更符合实际的情况。同时,与图9的触发时刻点相比,图11的触发时刻间隔更大,表明当τ=0.1 s时能够更好的减少控制器的传输频次,更好的节约能量的浪费。图12是事件触发机制下τ=0.1 s时的跟随车辆的测量误差,可以看到误差的幅值越来越小。
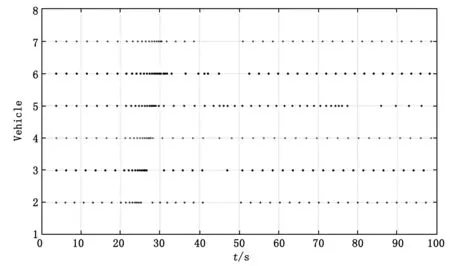
图11 事件触发下τ=0.1 s的跟随车辆的触发时刻点
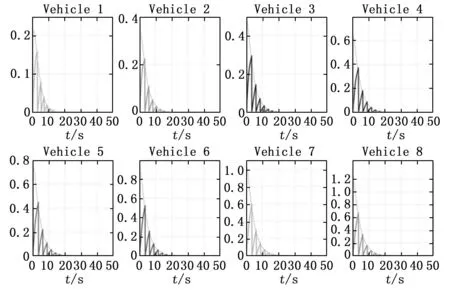
图12 事件触发下τ=0.1 s的跟随车辆的测量误差
算例4:当τ=0.35 s时,时延超过最大时延,考虑在事件触发机制下领导车辆速度变化的行驶情况。图13是在时延超过最大允许时延时的车辆队列的位置跟踪性能,由此可以看出,当时延超过上限时,车辆队列中的车辆发生了碰撞,因此,车辆队列系统是不稳定的。
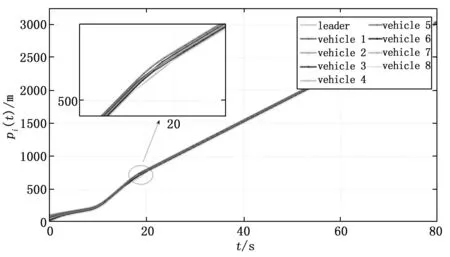
图13 事件触发下τ=0.35 s的跟随车辆位置曲线
4 结束语
本文针对车辆队列三阶模型,研究了在通信时延下基于事件触发机制的异质车辆队列一致性控制问题。所提控制器在事件触发机制下能够实现队列的稳定,且事件触发机制在节约通信能源上有着很好的作用。然后,通过利用Lyapunov稳定性理论和代数图论,证明了在所提事件触发策略下车辆队列能够实现稳定性,并得出了通信时延的上界。最后,给出仿真实验,仿真结果验证了所提控制器的有效性。
未来的工作将结合车辆队列控制的实际情况,进一步考虑存在外部干扰时车辆的通信情况,以及无线通信的数据丢包现象。
猜你喜欢
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
电子制作(2019年23期)2019-02-23
军营文化天地(2018年2期)2018-12-15
测控技术(2018年6期)2018-11-25
数学物理学报(2018年1期)2018-03-26
产品可靠性报告(2017年7期)2017-09-05
厦门理工学院学报(2016年1期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
电测与仪表(2016年17期)2016-04-11
