
基于激光测距的变电站机械作业安全预警系统
2024-04-01 06:37周晓磊靳莹莹王晓蕾
电器工业 2024年4期
周晓磊 马 保 靳莹莹 王晓蕾 王 鹏
(登封市供电公司)
0 引言
变电站是变换电压和电流大小、接收并分配电能的场所,在现代电力系统中,各种电压等级的变电站在电能传输中发挥着枢纽作用,是电能分配的重要支撑点[1-2]。随着社会经济发展,变电站电压等级越来越高,同时站内设备体积和重量也随之增加,为提高效率,变电站内的施工中需要用到大量大型机械辅助开展吊装作业。变电站内工况复杂,尤其是改扩建工程,其站内往往存在带电区域,大型机械在停电区域作业时,因视角问题,无法发现机械臂越过安全线靠近带电区[3],并且大多数机械未安装近电禁止器,带来较高安全风险[4]。
目前常用的测距方法有:移动定位服务系统(Location Based Service,LBS)、全球定位系统(Global Positioning System,GPS)、红外线和超声波等,变电站属于设备密集和高电磁干扰的环境,LBS、红外和超声波无法正常使用,而GPS 无法在变电站这种非公开可视范围内使用[5]。激光测距是近年来普及的新型测距方法,具有非接触、高抗电磁干扰和高精度的优点[6-8],同时不受卫星可视限制。本文提出以激光雷达为基础,设计对空测距装置,当机械超出安全作业面时发出声光报警信号,告知设备驾驶员出现越界问题。
本文首先介绍激光测距技术,接着分析变电站内典型作业区域[9],以此为基础,给出基于激光测距的变电站机械施工作业安全预警系统的总体设计和预警流程,最后开展预警系统测试。
1 激光测距技术
根据测距原理,激光测距技术有脉冲式、相位式和三角法三类,各种方式优缺点详见表1。从表1可以看出,激光相位式测距方法最适用于变电站内大型机械施工工况。

表1 三类激光测距技术特点
相比于脉冲式测距中距离为光速乘时间差的直接计算方法,相位式测距采用调制激光束并测定激光往返测程一次产生的相位延迟换算距离的间接计算法,即利用发射激光束与反射激光束之间的相位差计算测程长度,如图1 所示。

图1 相位式激光测距示意图
由图1 可以推导出相位式测距计算为:
式中,x为测程长度;c为激光速度;f为调制波频率;φ为发射波与接收波的相位差;N为整数尺;ΔN为余尺。
2 变电站内典型作业区域
2.1 三维半球区域
吊车等大型机械的施工范围以吊臂可工作空间为基础确定,常规大型吊车吊臂运动有底盘360°旋转、吊臂上下90°旋转和吊臂径向长度伸缩三个自由度,是典型的球坐标体系,具体见图2。考虑到实际中吊臂不可能向基座以下旋转,因此本文分析三维半球典型作业区域,此典型区域适用于机械可工作范围大、设备稀疏的场景,在机械工作范围小、设备复杂时可根据半球形区域内最靠近机械的带电区域设定安全距离,也可以视作三维半球典型作业区域。
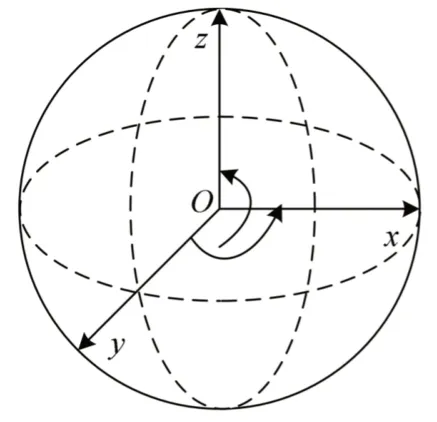
图2 三维半球作业区域示意图
三维半球区域中底盘和吊臂的上下旋转自由度均不涉及距离量,因此仅需取吊臂径向长度作为安全预警系统的判断值:
式中,l为吊臂径向长度;LThreshod为吊臂径向长度预警值。
2.2 长方体区域
在变电站改扩建现场,大型机械在停电间隔进行吊装作业,工作区域局限在指定间隔内,其中变电站内典型的主变间隔和线路间隔都是长方体区域,为尽可能扩大工作区域同时减少旋转面,吊车等机械往往位于长方体的某一侧面,具体如图3 所示。
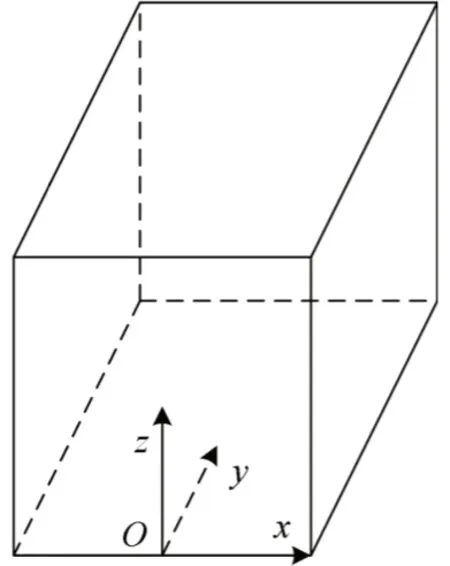
图3 长方体作业区域示意图
由于吊车位于长方体的侧面,不同底盘旋转角度和吊臂上下旋转角度时,吊臂可工作的径向长度均不同,考虑到实际变电站中同一坐标下不同高度区域均属同一间隔,即沿图3 中z轴方向上带电状态相同,那么长方体区域可视作高度无穷高,所以吊臂上下旋转角度不会导致越界问题,为简化安全预警系统判断值的计算,将三维长方体区域简化为图4 所示二维长方形区域,不过需考虑图4 中吊臂径向长度应为实际吊臂长度在地平面的投影,而非吊臂实际长度,即:

图4 二维长方形作业区域示意图
式中,l为实际吊臂长度;lxOy为吊臂在二维长方形区域的等效长度;ψ为吊臂与xOy平面的夹角。
长方体区域中吊臂的上下旋转自由度对越界问题的影响已由上式考虑,下面仅需分析底盘旋转和吊臂径向长度两个自由度对安全预警系统判断值影响,为方便分析仅考虑吊臂在Oy轴右侧:
式中,θ为底盘旋转角度;θTh为吊臂在安全范围内能伸至最长对应的角度,即计算公式变换的界限角度;a为长方体区域的宽;b为长方体区域的长。
3 系统总体设计和预警流程
3.1 总体设计
基于激光测距的变电站机械施工作业安全预警系统架构包括设备层、数据层和逻辑层,具有指令下发、硬件设备、工作区域识别、工作面计算和逻辑分析等功能,如图5 所示。

图5 基于激光测距的变电站机械施工作业安全预警系统设计图
设备层由指令下发和硬件设备两个模块组成,指令下发主要是机械操作员根据作业区域下发工况指令,确定机械处在三维半球形区域还是长方体区域,这是预警系统运行的首要前提;硬件设备主要用于激光测距,根据前面分析的典型工作区域,激光测距仅需测量吊臂径向长度,底盘旋转角度和吊臂上下旋转角度由吊车自身提供。将激光发射源置于吊臂与吊车底盘对接处,并且可随底盘360°和吊臂上下90°旋转,始终确保激光发射路径与吊臂同向。将激光反射装置置于吊臂顶端,并且可随吊臂径向伸缩移动,始终与激光发射路径垂直。
数据层由工作区域识别和工作面数据计算两个模块组成,工作区域识别是根据指令确定吊车所处典型工作区域,工作面数据计算是根据激光测得径向长度、底盘旋转角度和吊臂上下旋转角度描绘当前工作面。逻辑层由安全预警逻辑分析模块组成,根据数据层识别的工作区域和描绘的实时工作面,判断是否发出越界预警信息。
3.2 预警流程
基于激光测距的变电站机械施工作业安全预警系统的工作流程如图6 所示。
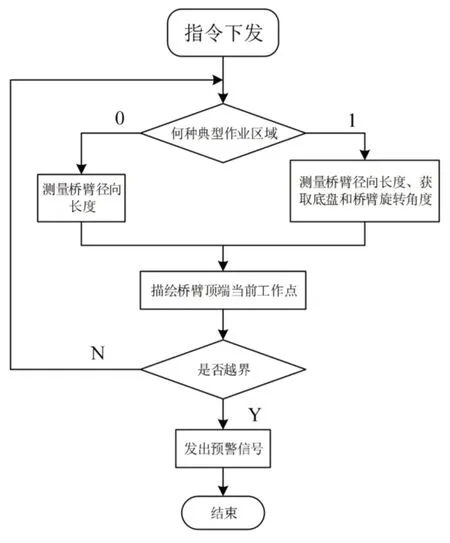
图6 基于激光测距的变电站机械施工作业安全预警系统流程图
一个安全预警流程判断周期以下发指令为起始,下发何种指令由机械操作员会商确定,指令包含工作区域种类和安全工作面,其中三维半球区域种类识别码为0,其安全工作面参数为半球半径;长方体区域种类识别码为1,其安全工作面参数为吊车所在长方体的长宽。根据以激光测距模块和吊车底盘、吊臂旋转角度测量模块实时获得的距离和角度数据描绘吊车的实时工作面,接着进入吊车实时工作面与安全工作面比对环节,如实时工作面处在安全工作面内,则进入下一判断周期,如实时工作面达到或超出安全工作面,则进入报警模块,触发吊车驾驶室内扬声器和发光二极管,以声光报警信号告知吊车驾驶员。
4 预警系统测试
2023 年10 月17 日在某220kV 交流变电站内主变间隔扩建现场进行了系统测试,所扩主变间隔位于变电站主变区的最东侧,现场可作业区域及标定的安全围栏均为长方体区域。在主变扩建间隔所用吊车上安装激光测距装置,并在吊车驾驶室内加装基于激光测距的变电站机械施工作业安全预警系统所用的数据采集和分析模块、越界逻辑判断模块。
测试时为确保现场人员和设备安全,特在指令下发时将安全作业面参数较实际值减小1m,测试结果表明实际工作面在距设定安全工作面超过0.1m 时均能准确给出判断结果,受限于激光测距精度,在设定安全工作面±0.1m 内判断结果未知,如表2 所示。

表2 220kV 变电站主变扩建现场测试结果
5 结束语
通过变电站主变间隔扩建现场测试结果可以看出,本文设计的基于激光测距的变电站机械施工作业安全预警系统能够判断机械实际工作面是否越界,虽然受限于测距装置精度在±0.1m 内无法准确判断,但考虑现场吊车等机械移动量,该误差可以忽略。本文所提系统能够提高变电站吊装作业时实时工作面可观、可测、可预警的同时,并未大幅增加吊车等机械改装的成本和复杂度,在变电站改扩建施工现场具备可实行性。
猜你喜欢
石油和化工设备(2020年5期)2020-06-09
电子测试(2018年23期)2018-12-29
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
石油化工建设(2017年5期)2018-01-26
制导与引信(2017年3期)2017-11-02
大陆桥视野·下(2017年8期)2017-09-19
幼儿画刊(2017年1期)2017-03-20
学苑创造·A版(2016年9期)2016-10-10
制造业自动化(2014年9期)2014-12-19
