
一种改进型KB-RLS算法在自干扰对消中的工程应用
2024-03-27 03:10王铎澎张生凤
舰船电子对抗 2024年1期
王铎澎,黄 华,张生凤
(中国船舶集团有限公司第八研究院,江苏 扬州 225101)
0 引 言
在现代电子对抗环境中,如果不能对己方设备收发系统间的电磁信号进行合理的收发隔离,那么强烈的系统间自干扰会带来:(1)接收系统误码率增加;(2)接收系统的接收信噪比恶化;(3)接收系统产生接收饱和甚至自激现象[1-2]。为了避免平台间强自干扰给收发系统带来的巨大阻碍,己方设备需要利用不同的措施对自干扰进行抑制,常见的抑制方法可以分为被动抑制和主动抑制2种。被动抑制主要是通过设计收发天线从而对自干扰进行抑制,但抑制能力有限[3]。主动抑制主要分为模拟域的自干扰抑制和数字域的自干扰抑制。模拟域的自干扰抑制主要是通过设计硬件对消电路的方式达到抑制干扰的目的[4]。在实际应用中,该方法虽然具有较好的抑制能力,但受到元器件精度的限制,在抑制干扰的同时,该方法会从模拟器件处引入新的噪声[5]。数字域干扰抑制则是指在数字域对系统接收的信号进行对消处理,以此抑制自干扰[6]。该过程是信号在进行正式处理前对消流程的最后一步,不会受限于电子元器件精度不足,具有巨大的抑制潜力[7]。所以,数字域的自干扰对消对于整个对消系统的最终结果具有极为重要的意义。
目前数字域对消的方法主要分为自干扰重建自干扰对消和自适应滤波自干扰对消2种方法[5]。自干扰重建自适应滤波是指在时域或者频域对干扰信号进行信道估计后再重建干扰信号,最后将重建信号从接收信号中减掉,如文献[7]提出异步数字域分段卷积方法,进行数字域自干扰抑制,并在频域重建干扰,最后重叠抵消干扰。自适应滤波则是利用自适应滤波器根据接收信号和参考信号进行数字滤波,最终同样地从接收信号中减去重建信号[8]。目前在相关的研究中,文献[9]针对8 MHz的窄带信号,利用自适应滤波器进行干扰抑制,取得了30 dB的干扰抑制效果,文献[10]则对归一化最小均方误差(NLMS)法、最小均方误差(LMS)法和递归最小二乘(RLS)法自适应滤波器的干扰抑制性能进行了对比分析。对2种方法[7-10]进行比较,自干扰信道重建自干扰抑制方法虽然能保持较高的对消精度,但实际过程中求解较为复杂,求解参量保持在o(N3)量级,而自适应滤波自干扰抑制在保证一定对消精度的条件下,计算过程简单,且计算参量在o(N2)量级,远少于自干扰信道重建自干扰抑制的运算量,有利于实际的工程应用。
自适应滤波自干扰抑制的核心在于自适应滤波算法的设计,寻找滤波器的最优权值。目前自干扰对消场景下常见的自适应滤波算法主要有LMS算法和RLS 2种。文献[11]利用LMS滤波器进行干扰对消,虽然取得了一定的干扰对消效果,但收敛速度较为缓慢。文献[12]则针对多输入多输出(MIMO)系统采用了RLS算法进行干扰对消,文献[13]分析了RLS算法和可变步长最小均方误差(VSSLMS),基于符号最小均方根(SSLMS)算法在同样信噪条件下的自干扰抑制性能。文献[14]则将LMS和RLS自适应滤波器结合起来完成了不同场景下的仿真工作。对文献[11]~[14]进行对比分析得到:RLS算法在最小平方损失函数准则下寻找最优权值,在实际应用中,相较于LMS算法寻找最快下降梯度,虽然收敛精度略低,但该方法具有更好的收敛速度,可以更好地满足实际作战的时效需求,故已有的研究在数字域自适应滤波自干扰对消应用中通常采用经典RLS算法进行自适应权值系数的计算。但是在相关的研究[12-14]中,RLS虽然收敛迅速,但由于算法本身的特点,该算法对输入信号具有较高的要求,输入信号较为复杂时,RLS算法的迭代过程容易发散,且应对信号突变时易产生误差变化较大的情况。而针对RLS算法的改进中,已有的改进测试通常停留在理想情况下的仿真测试,而改进后RLS算法的实际适应性未能得到有效的讨论和评价。
本文在结合实际应用需求的前提下,对RLS算法中迭代过程的收敛因子和自相关矩阵的迭代过程进行改进,在保持算法本身优势的前提下,克服了RLS算法本身迭代过程易发散的劣势,同时利用实际环境测得的电磁信号数据,进行对比测试,以此完成对该算法多方面的评价。
1 系统模型
如图1所示,在自适应滤波自干扰抑制模型中,发射的雷达自干扰信号一路直接进入自适应滤波器,作为发射信号X(n),另一路经过电磁信号传播的上下链路之后,作为参考信号d(n)进入自适应滤波器,自适应滤波器根据参考信号得到重建信号,最终将重建信号从参考信号中输出便得到自干扰抑制后的输出信号。
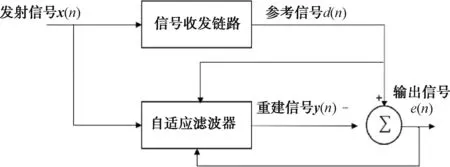
图1 干扰抑制自适应滤波信号流示意图
对应的M阶RLS滤波器中,X(n)、W(n)是迭代开始前的输入信号向量和权值向量,该向量在首次迭代之前进行初始化,e(n)是每次的迭代误差,K(n)是对应的卡尔曼增益向量。而PMM是自相关信号的迭代矩阵,通常初始化为对角线的M阶单位矩阵,具体的迭代过程如图2所示。
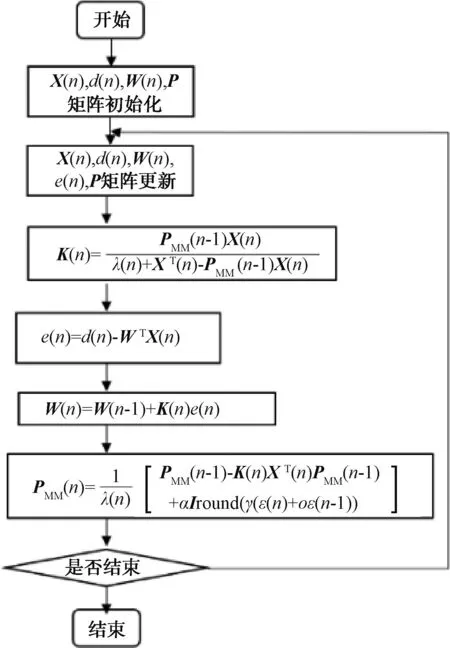
图2 RLS算法流程示意图
在RLS算法的实际应用中,为了克服算法本身的迭代易发散、收敛精度不高等劣势,研究者针对该算法进行了针对各个步骤的改进。
在RLS算法中,遗忘因子作为重要的迭代参数,直接影响了迭代过程的误差起伏,遗忘因子的改进中,文献[15]将收敛因子从固定的常值改为关于当次误差e(n)的函数为:
(1)
文献[16]则根据正则表达式将收敛因子的迭代公式改为:
λ(n)=λmin+1-λmin2L(n)
(2)
L(n)=-round(μe2(n))
(3)
在自相关矩阵的计算过程中,为了保持该矩阵的跟踪能力,研究者们在该部分加入了自干扰项,以此保证计算卡尔曼增益向量不至于降为0。如文献[17]中,将PMM矩阵的计算公式改为:
PMM(n-1)+round(γε(n))]
(4)
此外,关于权值计算公式的改进,文献[15]提出在迭代过程中,用公式(5)、(6)作为权值的计算公式:
W(n)=W(n-1)+K(n)e(n)+ρ(n)
(5)
ρ(n)=r×(W(n)-W(n-1))
(6)
式中:r为瞬时系数,为一常值。
该方法的改进未能达到较为良好的提升效果,故不作讨论。除此之外,已有的文献中相关讨论较少。
2 算法改进
目前已有的RLS算法改进主要通过引入当次误差作为反馈参量,以此调节收敛因子等重要参数的大小。若实际碰到信号突变时,当次误差则无法完全消除信号突变带来的误差增加,故本文在改进RLS算法引用当次误差e(n)的同时,引入了前次误差e(n-1)。结合文献[17]的研究,若引入项为e(n)、e(n-1)或e2(n)时,则该项与输入噪声有耦合关系;若引入项e(n)、e(n-1)为二元一次函数形式,则不会与输入噪声有耦合关系,故引入形式选择为e(n)和e(n-1)的二元一次函数形式。
本文结合已有的研究,对RLS算法进行改进,在遗忘因子项引入当次误差和前次误差,见式(9),在自相关矩阵项引入自干扰项,且该自干扰项为当次误差和前次误差的函数,见式(13),以此增加算法的稳定性。
最终的改进算法具体流程为:
X(n)=[x(n)x(n-1)…x(n-M-1)]T
(7)
W(n)=[w0(n)w0(n)…wM-1(n)]
(8)
(9)
若λ(n)>1则λ(n)=1
e(n)=d(n)-WTX(n)
(10)
(11)
W(n)=W(n-1)+K(n)e(n)
(12)
PMM(n-1)+αIround(γ(ε(n)+oε(n-1)))]
(13)
式中:a1,a2,b,m,d,γ,o均为调节系数,需实测。
3 硬件测试
在结合具体干扰对消测试的实际情况下,本文所设计的硬件测试框架如图3。
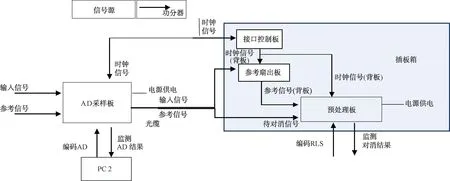
图3 适应滤波自干扰对消测试场景示意图
在该测试场景中,用自适应滤波器对测试信号进行重建,激励信号经过不同的传输路径,先后到达预处理板,然后在预处理板中进行测试。
在测试过程中,任意波形发生器产生信号后,经过一分二功分器,一路作为输入参考信号直接进入模数处理器(ADC)进行采样,随后进入预处理对消板作为参考;另一路激励信号经过上下变频链路之后,再进入ADC进行采样,作为参考。
参考信号和输入信号进入ADC之后,输入信号直接进入预处理板,参考信号传入参考扇出板后,通过背板传输进入预处理板,至此,2路信号全部进入预处理板,数字对消处理开始。
为保证2路信号的同时性,选用信号发生器发射10 MHz点频信号作为时钟信号,分别供给ADC和插箱内的接口控制板,接口控制板向参考扇出板和预处理板提供同源时钟信号。
在该硬件架构下,对自适应滤波算法进行针对性测试:
(1) 不同类型信号对消精度
设置部分重要参数如表1所示。
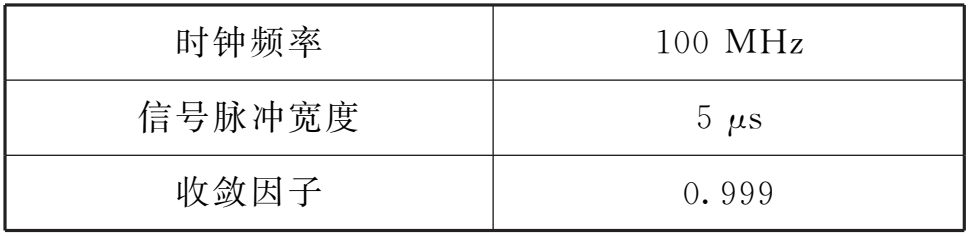
表1 自适应对消测试部分参数表
在对简单的多个脉冲信号进行对消测试中,测试信号波形如图4所示。
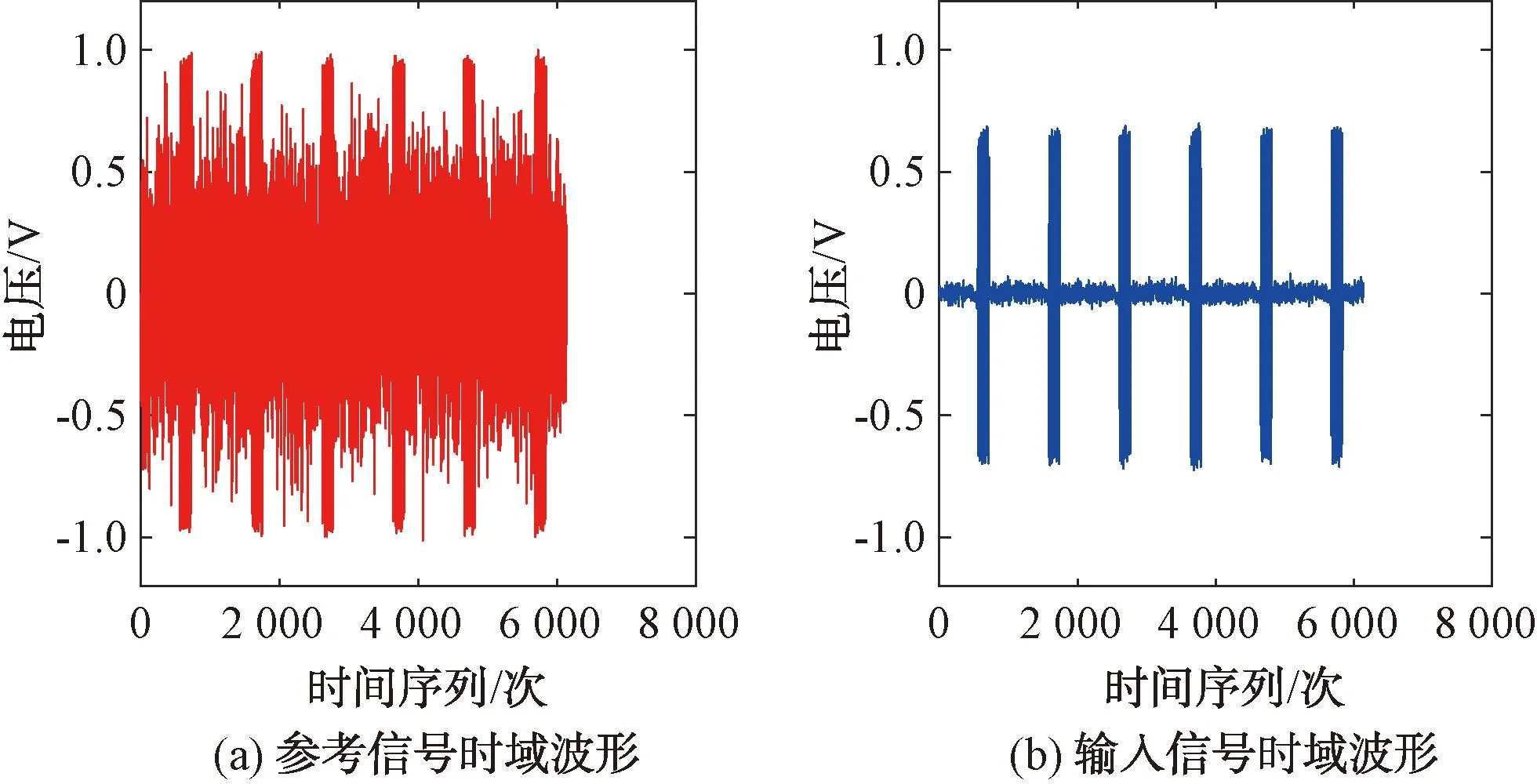
图4 多脉冲测试对消收发信号波形图
利用2种算法进行对消,对消结果如表2所示。

表2 2种算法对消脉冲信号结果统计表
在针对非线性调频信号(NLFM)信号的测试中,根据实际的对消结果绘制对消NLFM信号频谱,如图5所示。
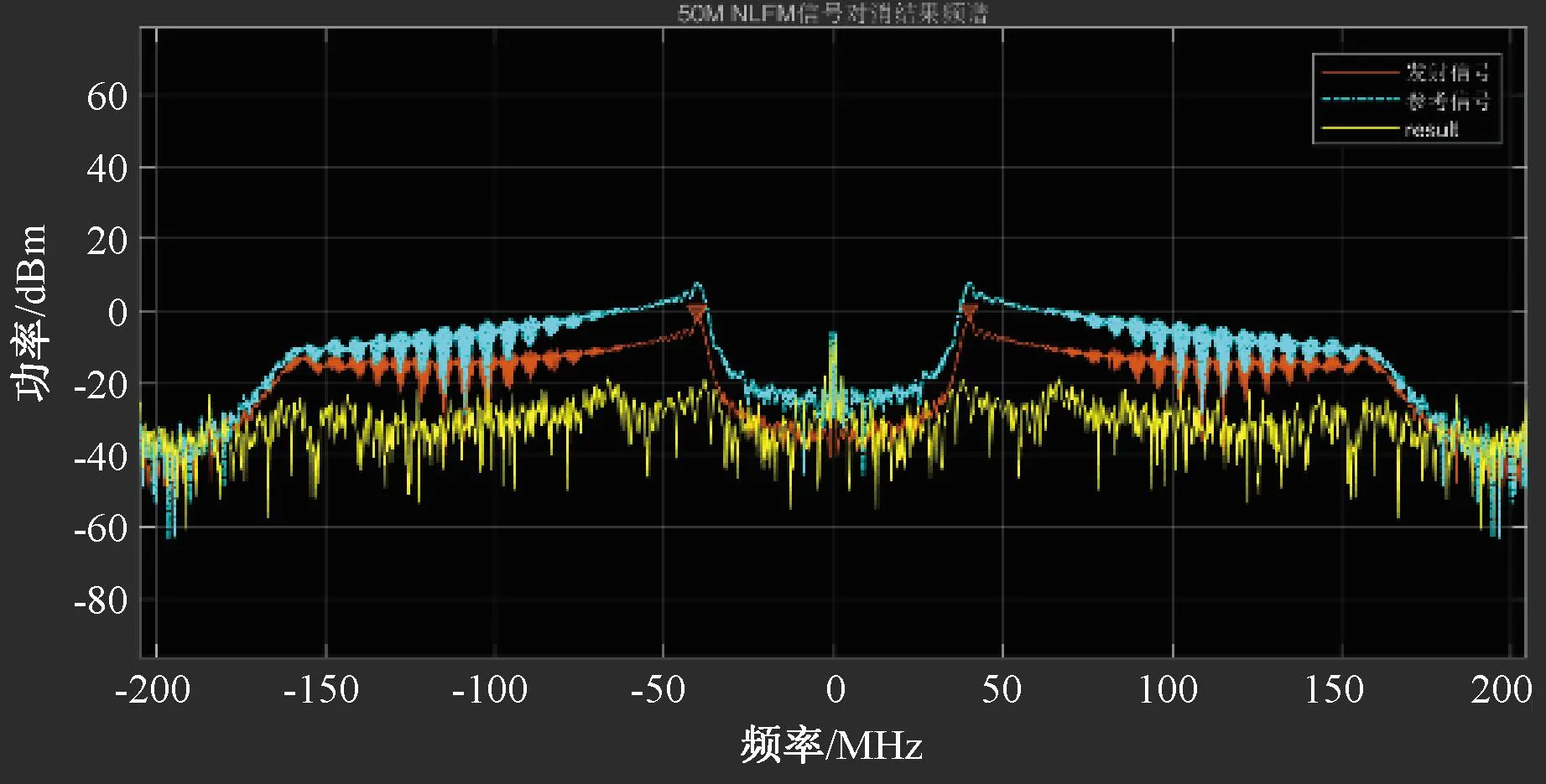
图5 经典RLS算法对消NLFM信号频谱
存储该测试结果后利用KB-RLS算法再次对消,结果如表3所示。

表3 2种算法对消NLFM信号结果统计表
同样地,针对50 MHz带宽的调相信号(巴克码)时,实际对消测试信号频谱如图6所示。
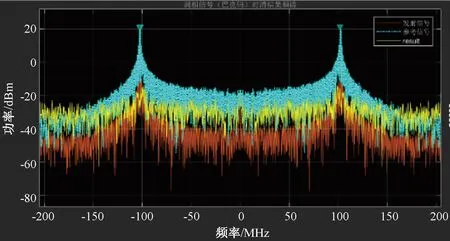
图6 经典RLS算法对消调相信号频谱
利用本文改进的算法进行对消测试后,对比最终对消结果,见表4。
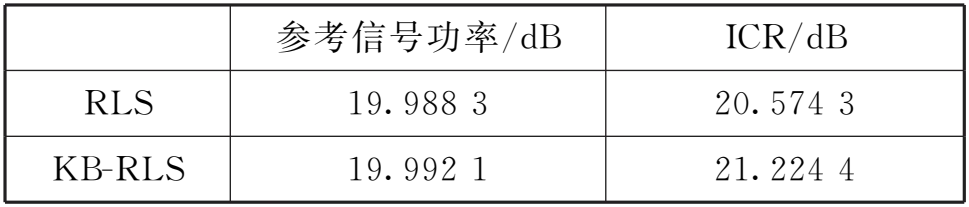
表4 2种算法对消调相信号结果统计表
(2) 针对不同带宽信号
该项测试用不同带宽的LFM信号进行测试,具体参数见表5。

表5 不同带宽测试信号部分参数表
当LFM信号带宽为50 MHz时,实际对消测试信号频谱如图7所示。
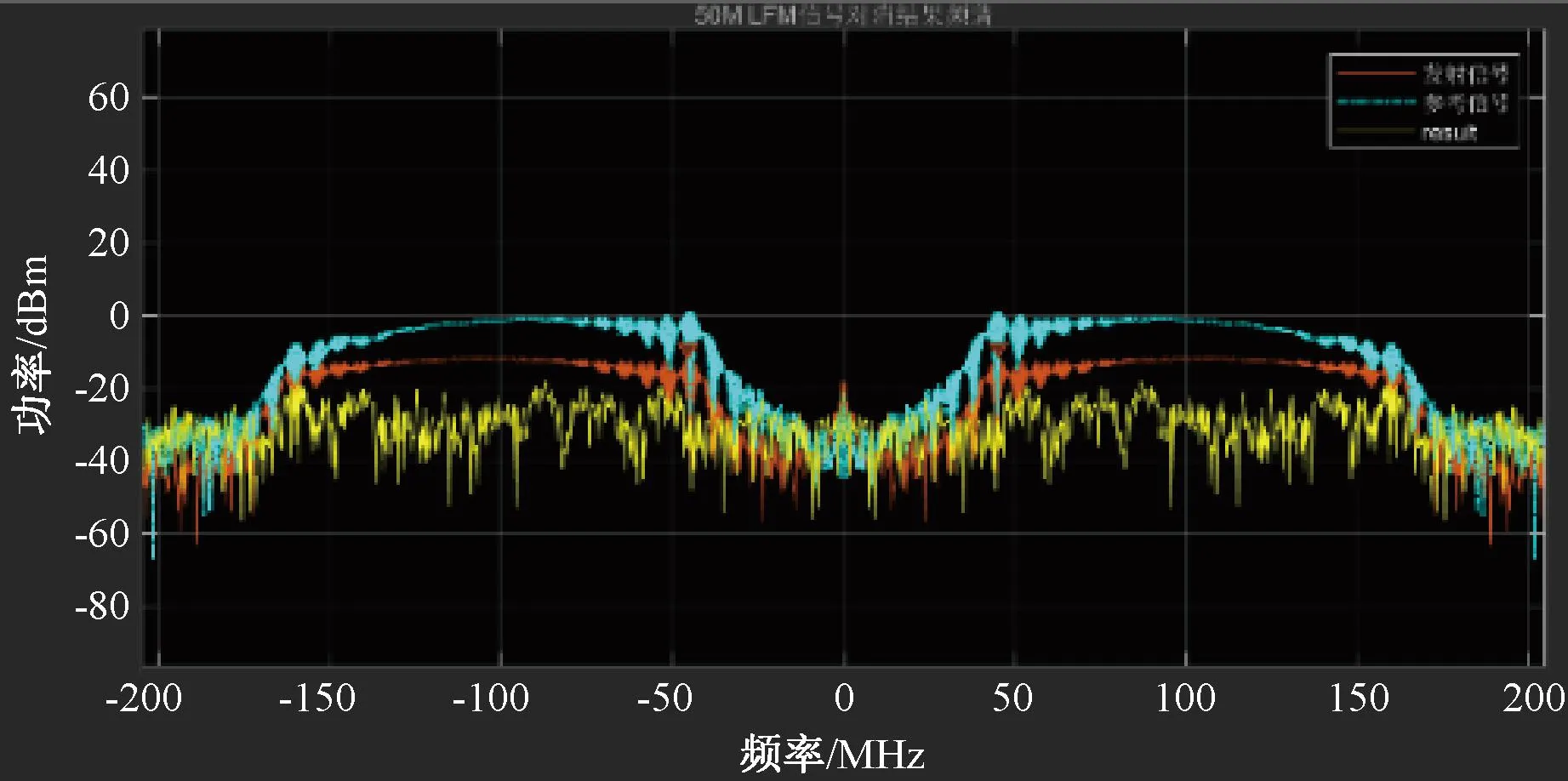
图7 经典RLS算法对消50 MHz LFM信号频谱
而当结果分别为75 MHz,100 MHz,150 MHz,175 MHz时,对最终对消结果进行统计,见图8。
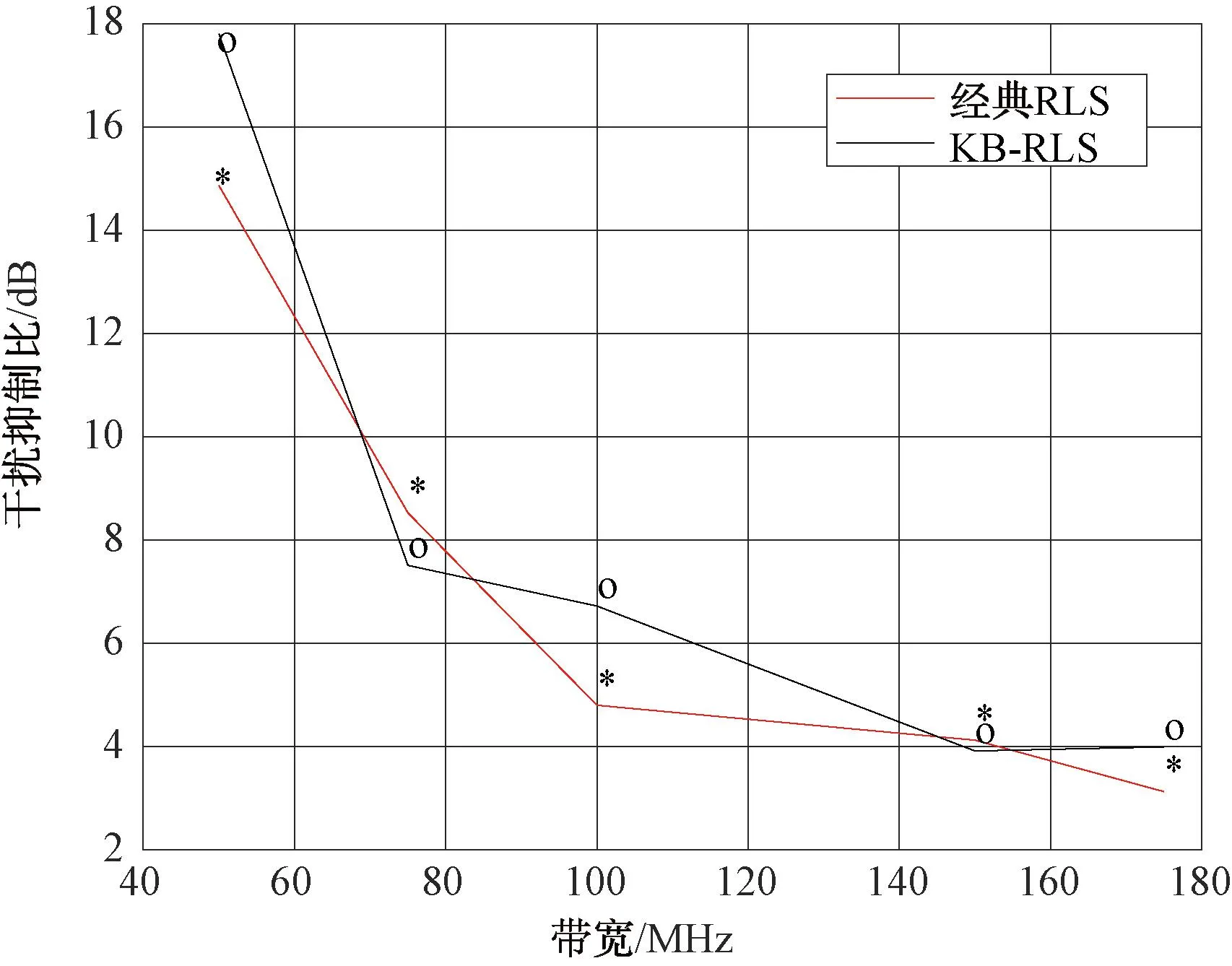
图8 不同带宽下2种算法对消结果示意图
(3) 针对外来信号适应性
该项测试中,在实际接收信号中添加了不同的外界信号,以此检测算法在最终应用中的可靠性,详细的测试参数见表6。

表6 外来信号测试部分参数表
测试中原有的信号频谱如图9所示(以外界添加单点信号为例)。

图9 RLS算法对消50 MHz LFM外来单点信号频谱
对最终的测试结果进行统计,并得到表7。

表7 2种算法测试外界信号统计表
在该项测试中,本文提到的KB-RLS算法在针对第1项的脉冲信号测试中取得了优于经典RLS算法的对消结果,在面对其他复杂信号时,也能保证与RLS算法对消结果基本持平,且保持外界信号不被消除。但在碰到对消信号频带扩展时,2种算法均未能取得较好的对消效果,需要继续研究。
4 结束语
本文基于改进型KB-RLS算法,搭建了自干扰对消的测试验证场景,对不同类型、不同带宽及实际电磁环境下的信号进行了测试。测试结果表明,该算法取得了更高的收敛精度和更好的对消效果。与经典RLS算法相比,该算法针对实际电磁环境下的100 MHz带宽的LFM、NLFM、调相信号及脉冲信号,对消效果均调高了1~3 dB。
猜你喜欢
空间科学学报(2021年6期)2021-03-09
电子制作(2019年11期)2019-07-04
测控技术(2018年7期)2018-12-09
电子制作(2018年16期)2018-09-26
制导与引信(2017年3期)2017-11-02
系统工程与电子技术(2016年7期)2016-08-21
工业设计(2016年11期)2016-04-16
火控雷达技术(2016年2期)2016-02-06
环境科技(2015年6期)2015-11-08
电网与清洁能源(2015年2期)2015-02-28
