
智能网联汽车网络架构分析及安全检测*
2024-03-26 04:48:20袁豪杰
信息安全与通信保密 2024年1期
袁豪杰,唐 刚
(中国软件评测中心,北京 100048)
0 引 言
当前,随着全球新一轮科技革命和产业变革的蓬勃发展,汽车与信息通信等领域技术加速融合,电动化、网联化、智能化成为汽车产业的发展潮流和趋势,其中,智能网联汽车已经成为汽车行业未来发展的主要方向。智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与车、路、人、云端等(以下用X 代替)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并可最终实现替代人完成驾驶操作的新一代汽车。国务院办公厅2020年发布的《新能源汽车产业发展规划(2021—2035年)》提出,新能源汽车将融汇互联网、大数据、人工智能等多种变革性技术,推动汽车从单纯交通工具向移动智能终端、储能单元和数字空间转变[1]。国家发改委2020年发布的《智能汽车创新发展战略》指出,到2025年,我国智能网联汽车的技术创新、产业动态、基础设施、法规标准、产品监管和网络安全体系将基本形成[2]。综合来看,在互联网技术和智能技术的影响下,信息通信企业,新兴互联网科技公司,网络运营商、服务商以及基础设施公司不断融入汽车产业,使得汽车产业由垂直产业链向网状生态圈演变,成为未来汽车产业生态不可或缺的重要组成部分。
然而,在智能网联汽车快速发展的同时,智能网联汽车网络和数据安全问题随之快速增多。据统计,2018年针对智能汽车的网络攻击数量是2010年的6 倍,2022年则增至20 倍[3]。在此背景下,对比分析传统汽车和智能网联汽车架构,并面向智能网联汽车开展安全检测研究具有重要意义。
1 传统汽车网络架构简述
传统汽车网络架构主要由控制器局域网(Contriller Area Network,CAN)、可变数据的控制器局域网(CAN with Flexible Data-Rate,CAN-FD)等各类总线[4]以特定的车内通信协议规则和消息格式,控制车内各电子控制单元网络节点(Electronic Control Unit,ECU)进行统一通信。按照传输类型的差异性,传统汽车网络的车载总线可分为5 种类型。不同类型车载总线的特点和用途如表1 所示。

表1 传统汽车网络的车载总线类型对比
2 智能网联汽车网络架构探讨
智能网联汽车具备智能化和网联化特点,需要强大的通信网络支撑车辆通信,具体包括利用车载网络开展车辆内部通信和利用无线技术开展车辆同外界的通信(Vehicle to Everything,V2X)。其中,前一类通信目前多基于车载以太网技术。
2.1 车载以太网应用分析
区别于传统汽车网络架构,智能网联汽车的首要目标不仅是保障车辆自身网络通畅,还需要确保任一路段的所有车辆、车辆与道路基础设施及云服务平台实现有效联网,确保信息能够按照一定规则进行交换,并且保证极低的通信时延和极高的可靠性。此外,智能网联汽车还需要确保网络具备一定的独立性,即确保在偏远地区、网络基础设施覆盖不完善的地区也可以具备一定程度的联网功能。为了确保上述智能网联汽车驾驶目标得以实现,车载以太网[7](Automotive Ethernet)方案随之诞生。
初始车载以太网采用带有屏蔽层的低电压差分信号(Low Voltage Differential Signaling,LVDS)线缆。LVDS 采用极低的电压摆幅提供高数据传输率,可以实现单点对单点或单点对多点的连接,具备低功耗、低误码率、低串扰和低辐射等特点。尽管LVDS 线缆可满足汽车行驶等环境下的使用要求,但是其自身所依赖的厚重屏蔽层限制了其在汽车狭小布线空间的运用,同时LVDS 线缆的连接器也较其他线缆复杂,这对车载以太网提出了更高的要求。
当下的车载以太网解决方案,主要是由博通公司发明的BroadR-Reach 以太网技术。BroadR-Reach 采用了单对非屏蔽双绞线电缆和标准以太网物理层组件来实现100 Mbit/s 速率的数据传输,同时BroadR-Reach 基于特殊编码方式,将传统以太网的125 MHz 基准频率变为66.67 MHz,进而改善信号抗电磁干扰(Electro Magnetic Interference,EMI)、射频干扰(Radio Frequency Interference,RFI)等特性。该技术允许多种车内系统同时通过单对非屏蔽双绞线存取信息,由于采用非屏蔽线缆,基于BroadR-Reach 以太网技术的车载网络互联成本可降低约80%,线缆重量则较传统的LVDS 线缆重量降低了30%。
从协议层面来看,在传统以太网基础上,车载以太网的协议在物理层方面有着巨大的改变。BroadR-Reach 在物理层面引入了100BASE-T1、1000BASE-T1 重大技术,打破了车载以太网技术壁垒,使以太网适应汽车高速联网的电子要求。其中,100BASE-T1 是指通过一对非屏蔽双绞线可实现100 Mbit/s 的全双工数据传输,传输频率为66.67 MHz;1000BASE-T1 的传输频率为750 MHz。此外,车载以太网还使用了包含基于车载以太网的诊断(Diagnostic communication over Internet Protocol,DoIP)、通过网络提供面向服务的通信(Scalable Service-Oriented Middleware over IP,SOME/IP)和传输控制协议(Transmission Control Protocol,TCP)等。
2.2 对V2X 通信协议的分析
V2X 是智能网联汽车网络架构的重要组成部分,也是智能网联汽车信息交互占比最大的部分,包括了车与周边环境和网络的一切通信。具体来讲,主要分为车与其他车辆(Vehicle to Vehicle,V2V)、车与行进过程中的基础服务设施(Vehicle to Infrastructure,V2I)、车与周围行人(Vehicle to Pedestrian,V2P)、车与其他网络(Vehicle to Network,V2N)的信息交互等,同时车内主要依据车载远程信息处理器(Telematics BOX,T-BOX)实现各类指令和信息的传递。智能网联汽车通过各类V2X 通信,整合了北斗、全球定位系统(Global Positioning System,GPS)等定位导航系统,连接了车与车、车与车联网络服务平台、车与基站,实现汽车从传统机械化动力设备向现代信息化智能设备的转变[8],通过V2X 交互的信息可以包括基础安全信息,如车辆或行人的位置、移动速度、移动方向等,以辅助其他车辆或实体判断是否存在安全隐患;也可以包括采集到的传感器信息,如车辆将通过摄像头或雷达采集到的周围环境的信息发送给其他的车辆或行人,从而使得其他的车辆或行人获得更多的道路交通状况信息,以提高道路安全性。
智能网联汽车的V2X 通信应用场景异常复杂,包括道路安全、城市交通和信息服务等,此外面向未来还需兼容自动驾驶等复杂场景,例如,在上述应用中,道路安全应用场景主要对通信性能提出低时延、高可靠的要求;城市交通对其提出高频度、高传输范围、高传输速率等要求;信息服务则提出大带宽的要求。此外,在智能网联汽车实际工作期间,车辆的高度运动会带来多普勒频移、环境复杂变化等问题,这对高密度、单对多、多对多的V2X 通信提出了更高的要求。常见的无线通信的实现方式主要包括无线电、广播、蜂窝式网络(Cellular)、专用短程通信(Dedicated Short-Range Communication,DSRC)等。当前,用于V2X 通信的主要有2 种技术体系[9],一种是基于DSRC 的DSRC-V2X 技术体系,另一种是基于蜂窝网络的Cellular-V2X(C-V2X)技术体系。
DSRC 车载通信标准起源于IEEE 802.11 无线局域网(Wireless Local Area Networks,WLAN)标准,并被重新命名为IEEE 802.11p。在IEEE 802.11p 协议标准完善稳定后,IEEE 又推出了1609.x 系列协议标准,作为DSRC-V2X 的配套安全框架。当前,基于DSRC 的V2X 通信依据标准IEEE 802.11p 在物理层和接入层上提供无线接入,网络层则依据标准IEEE 1609.x,定义了多信道操作、网络服务以及各通信实体安全等,其主要工作频段有800~900 MHz、2.4 GHz(蓝牙、Zigbee)和5.8 GHz(Wi-Fi)3 类频段,其主要技术特点如表2 所示。从国际上来看,DSRC 主要技术标准化体系包括欧洲主导的CEN/TC278、美国主导的ASTM/IEEE 和日本主导的ISO/TC204,DSRC-V2X 也主要由欧美国家主导力推。

表2 常见车载无线通信技术特点
区别于基于WLAN 的DSRC-V2X 技术,以中国为主要代表的国家推出了C-V2X 技术体系,美国联邦通信委员会也于2019年将部分已分配给IEEE 802.11p 的5.9 GHz 频谱重新划出一部分分配给C-V2X,这意味着美国对C-V2X 持积极态度。C-V2X 与生活中常用的手机移动网络(蜂窝网络)一样,都是依据第三代合作伙伴计划统一标准的通信技术,并且基于4G、5G 等形成车用无线通信技术。此外,C-V2X 又可细分为基于4G 的LTE-V2X 以及基于5G 的5G-V2X 进行数据传输。相较于DSRC-V2X,C-V2X 主要有以下3 方面优势:一是DSRC-V2X 需要所有终端安装收发模块方可进行点对点直连通信,而C-V2X 可同时实现直连与非直连2 种通信方式,即车辆在实现与其他车辆或基础设施点对点直连通信的基础上,还可以通过蜂窝网络与其他交通实体进行信息交互;二是4G、5G 等信息基础设施发展完备,有利于推动C-V2X 技术落地;三是C-V2X 的通信范围更广,且蜂窝网络芯片价格低于WLAN 芯片,综合部署成本更低。但目前基于蜂窝网络的通信也需要技术创新,以更好地服务多对多、高频度、高随机等车与车通信场景。C-V2X 与DSRC-V2X 的主要技术对比如表3 所示。

表3 C-V2X 与DSRC-V2X 技术对比
2.3 对V2X 通信架构及典型场景应用的分析
无论基于C-V2X 还是基于DSRC-V2X,V2X 的最终目的都是实现车辆和其他车辆、路、人、云服务平台的信息交互。其完整通信架构如图1 所示。
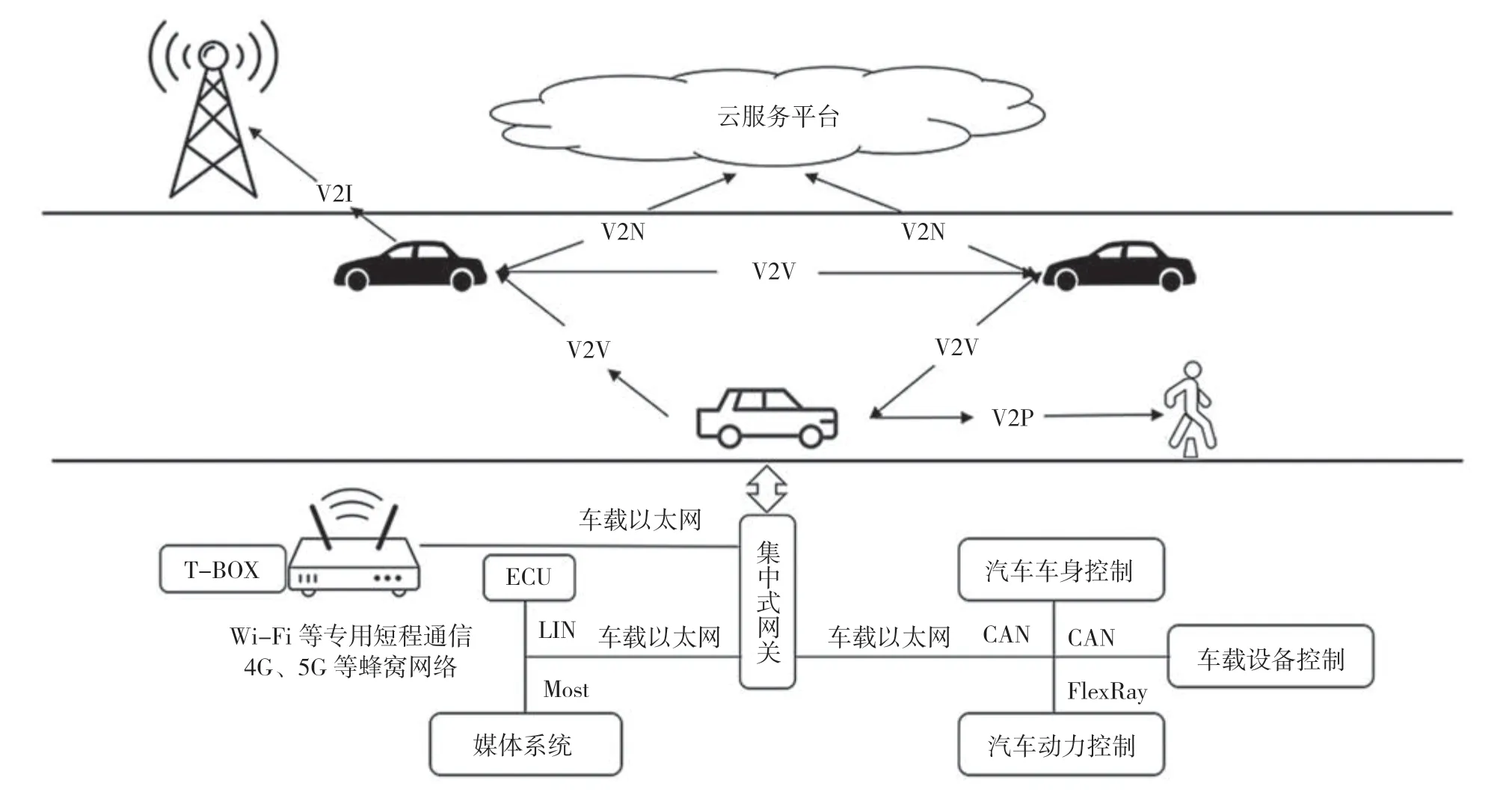
图1 V2X 通信架构
在实际通信过程中,根据不同的应用场景,对智能网联汽车各网络的运行指标,如时延、数据更新频率等有着不同的要求。在实际运行过程中,根据汽车工程学会发布的《合作式智能运输系统 车用通信系统 应用层及应用数据交互标准》,将通信网络运行指标大致划分为交通安全、交通效率、交通管理和信息服务等不同类别[10]。其具体网络运行指标要求如表4所示。

表4 V2X 通信网络运行指标
3 智能网联汽车网络安全风险及检测方法
3.1 风险分析
智能网联汽车较传统汽车最大的网络安全风险点在于各类网络的互联互通导致汽车内部的通信网络被暴露在其他外部网络中,故针对智能网联汽车的网络攻击可从任意网络层面发起,如直接连接感知层系统软件或接口自下而上发起攻击;也可从应用层自上而下发起攻击,如利用漏洞窃取认证信息,入侵远端云服务平台,远程操控汽车等。此外,黑客可以通过电动汽车充电桩的充电电缆,实现对连接到同一网络下充电桩的任意车辆发起攻击[11],或通过OBDII 端口、CD 播放器、USB 等入口点访问车载网络并注入攻击报文[12],或利用受安全加固的Wi-Fi 发起拒绝服务(Denial of Service,DoS)攻击[13],或将汽车连接到恶意Wi-Fi 热点上并加以控制[14]。相对而言,传统汽车遭受的网络攻击大多局限在传感器层面[15]。智能网联汽车常见网络攻击类型如表5 所示。
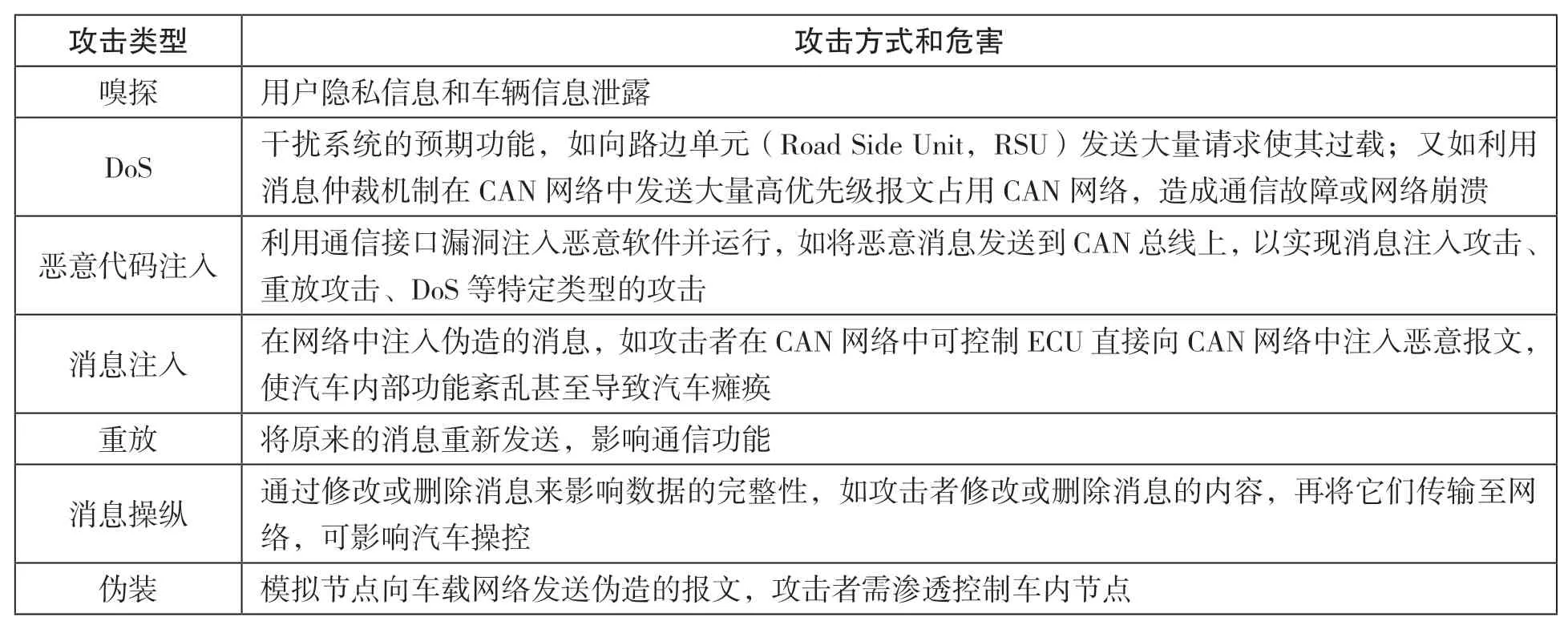
表5 智能网联汽车常见网络攻击类型
3.2 基于生成对抗网络的智能网联汽车CAN网络实时检测
实时检测主要针对车内网络CAN 总线,主要基于以下3 方面考虑:一是车内网络是智能网联汽车的基石底座,车内网络的数据交互承载着车辆最基本的动力功能;二是尽管车载以太网等新型网络体系在智能网联汽车已得到广泛应用,但CAN 总线仍被广泛应用于汽车传动系统和车身控制领域,连接着与汽车运动行为相关的关键功能部件,在车辆动力总成、保障车辆安全行驶方面具有不可替代的作用[16];三是CAN 作为最基本的车内网络总线之一,在设计之初并未考虑网络攻击的威胁,叠加CAN 总线协议本身的固有缺陷,使得CAN 总线难以应对智能网联汽车的复杂安全威胁[17]。CAN 总线协议的固有缺陷如表6 所示,对其发起攻击的方式和危害可见表5。

表6 CAN 总线协议特点及对应缺陷
生成对抗网络(Generative Adversarial Network,GAN)是一种基于对抗学习的深度生成模型[20],常用于区分真实图像和虚假图像。基于GAN 开展CAN 检测的基本原理是将CAN 数据转化为图像,其中正常CAN 数据转化为真实图像,掺杂攻击数据的CAN 数据转化为虚假图像,利用GAN 模型将这两种图像加以区分,达到对攻击数据的检测效果。GAN模型的显著优点在于模型训练过程中,可自动生成随机图像用以代替攻击图像,可有效解决数据量不足的情况。GAN 模型如图2 所示。

图2 GAN 模型
在图2 所示模型中,生成器G将随机数据转化为生成样本(虚假图像G(z)),并和真实图像x一同输入判决器,通过判决器D区分真实图像和虚假图像。上述模型可表示为:
式中:V为对抗损失函数;E为期望函数。式(1)所反映的基本逻辑为对判别器D而言,如果样本为真实图像,那么D会最大化其输出值,即;如果样本为虚假图像,那么D会最小化其输出值,即,也可以用来表述。
最终,判别器达到以下目标,即最大化判断正确数据为正确、不正确数据为不正确。而对于生成器G而言,则要生成尽可能具有迷惑性的图片,尽可能最小化判别值,以反过来促进判别器的判别能力,即。
GAN 模型在实车应用中主要按照如图3 所示的逻辑装配,通过将训练好的检测模型嵌入智能网联汽车网络体系中,实现对车内CAN 网络的实时检测,该模型可实现对重放、恶意代码注入、嗅探、DoS 等网络攻击的检测。在实际部署过程中,由于GAN 模型所需要的计算量较大,智能网联汽车自身往往无法提供充足的计算资源以保证对异常数据实时检测,通常可结合C-V2X 网络体系,将CAN 网络检测模型部署在边缘计算平台,通过云化形式实现实时检测。
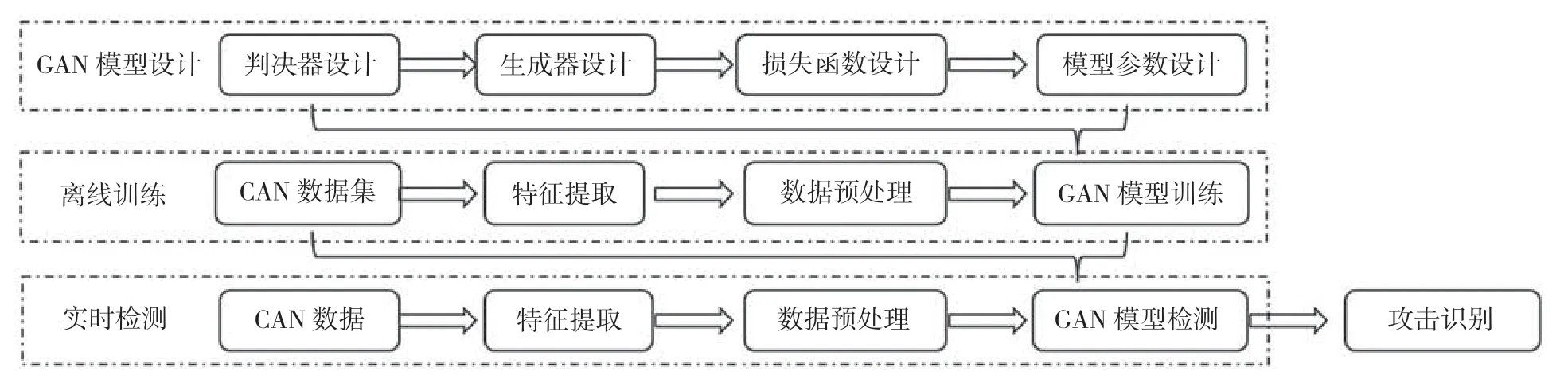
图3 基于GAN 的智能网联汽车CAN 网络检测模型
4 结 语
近年来,智能网联汽车的发展越来越迅速,对车的安全性要求也越来越高。本文详细介绍了智能网联汽车的网络体系架构,特别是底层网络架构,如车载以太网、DSRC-V2X、C-V2X等,此外,还提出现有网络体系架构下的联网汽车所面临的攻击风险。基于密切关联汽车基本功能的CAN 网络,设计一种实时检测模型,以提高智能网联汽车在实际行驶过程中的安全性,该模型可进一步对车载以太网等网络进行检测。未来,在各类电信基础设施不断完善和城市边缘算力、车载计算能力进一步提升的情况下,DSRC-V2X、C-V2X 等丰富场景下的通信安全,可尝试利用相关人工智能模型开展实时安全检测,在提高交通效率的同时提升交通安全和隐私保护能力。
猜你喜欢
装备制造技术(2020年1期)2020-12-25 05:18:20
工业经济论坛(2020年6期)2020-04-13 00:38:20
铁道通信信号(2020年8期)2020-02-06 09:13:18
汽车观察(2018年12期)2018-12-26 01:05:26
汽车观察(2018年10期)2018-11-06 07:05:20
中国公共安全(2017年11期)2017-02-06 05:28:09
电子制作(2017年24期)2017-02-02 07:14:44
现代制造技术与装备(2015年4期)2015-12-23 10:20:22
电源技术(2015年2期)2015-08-22 11:28:14
电源技术(2015年7期)2015-08-22 08:48:48
