基于Halbach阵列的储罐爬壁机器人吸附装置优化分析
2024-03-25 01:58:16龙飞飞
大连民族大学学报 2024年1期
冯 军,龙飞飞
(大连民族大学 机电工程学院,辽宁 大连 116605)
大型储罐是石化企业必备的重要装备,存储的气态、液态等[1]化工原料与产品具有腐蚀性,长期使用会产生腐蚀、裂纹等缺陷,进一步扩展开裂会发生泄露甚至爆炸,导致严重的安全生产事故,因此为确保设备安全运行,储罐需要定期检测。目前,对大型储罐的检测[2]仍采用传统的人工检测方式,劳动强度大、危险性高,需要自动化设备替代。爬壁机器人[3]是机器人与吸附技术的结合,广泛应在工业、建筑、化工等领域,用于储罐检测[4]的爬壁机器人引起国内外研究院越来越多的重视。吸附装置是储罐爬壁机器人的重要组成部分,安全可靠的吸附装置是储罐爬壁机器人工作的前提。永磁吸附具有吸附力大,安全稳定,结构简单等优点,是吸附装置理想的吸附方式之一。
2008年,桂仲成等在研究多体柔性永磁机器人中设计了一种非接触吸附装置,该吸附装置中相邻永磁体有间隔,充磁方向按行、列交叉排布,磁利用率较低。2013年,陈勇等[5]将Halbach阵列[6]运用到爬壁机器人吸附装置,并运用遗传算法,对吸附装置进行迭代优化,提高了磁能利用率,但吸附装置体积上并未进行优化。2020年,刘峰等[7]对基于Halbach阵列吸附装置的单位重量吸附力进行优化,提高了吸附效率。2021年,袁亚强等[8]设计了一种双层Halbach阵列吸附装置,对比普通单层Halbach阵列,吸附力提高,但存在体积过大问题。
综上所述,Halbach磁吸附阵列已经在爬壁机器人设计上得到了一定程度应用,但大部分研究集中于如何提高磁吸附力,少有研究集中于提高吸附力的同时减小吸附装置的体积。本文的吸附装置增加轭磁铁,通过仿真实验选择更大吸附力的Halbach阵列排列方式,在此基础上,提出单位体积磁吸附力的概念,通过控制变量的方法,优化吸附装置的结构参数。
1 吸附装置结构设计
储罐爬壁机器人采用非接触式吸附方式[9],与接触式吸附方式相比,虽然吸附力有所减小,但对爬行壁面无磨损,不会影响壁面使用寿命,并且不会产生静电火花,避免意外事故发生。吸附装置安装在机器人底板上如图1。底板左右两侧各有一组排列相同的吸附装置,在提供足够吸附力的同时,也避免机器人在爬壁过程中不会因某一点吸附力集中而发生侧翻。

图1 吸附装置安装示意图
Halbach永磁阵列是由美国劳伦斯伯克利国家实验室Klaus Halbach教授在做电子加速实验发现,Halbach阵列通过将不同充磁方向的永磁铁按照一定规律排列,能够在磁体的一侧汇聚磁力线,而另一侧磁力线较弱,从而获得较为理想的单边磁场原理如图2。
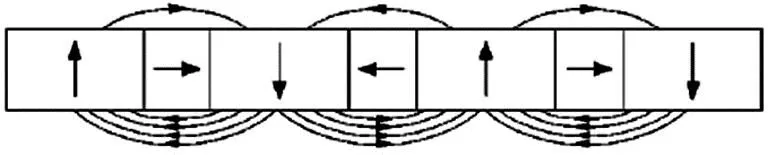
图2 理想状态下Halbach磁场分布图
在实际使用中,Halbach阵列无法直接用于爬壁机器人吸附装置上,一方面目前的工艺水平无法制作出单个磁通矢量连续变化的永磁体[10],只能由多个单独磁化的永磁体组合拼装而成,使得阵列的磁场不均匀,无法获得理想的单边磁场。另一方面,Halbach阵列两端会出现弱磁场,影响机器设备的正常运行。为了克服其缺点,本文在Halbach阵列的上侧和两端覆盖了磁铁如图3。吸附装置与壁板之间留有气隙,箭头方向代表磁化方向,水平磁化磁体和垂直磁化磁体之间紧密贴合,一旦出现空气间隙,会降低Halbach永磁阵列的磁通密度,减弱聚磁效应。
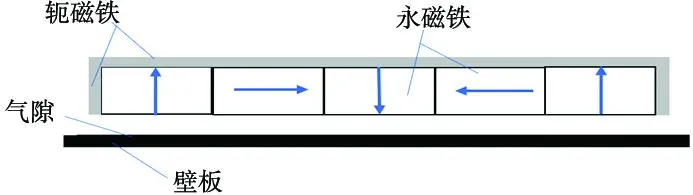
图3 Halbach永磁阵列吸附装置
2 吸附装置仿真实验
2.1 静态电磁场分析
三维静态磁场的麦克斯韦方程组为
(1)
其中,
(2)
式中,Ax,Ay,Az,Bx,By和Bz分别为磁场强度和磁感应强度在x,y,z上的分量。根据Maxwell张力方法,当闭合面S处于均匀且各向同性的介质中时,作用在磁体上的合力F与张力张量T的面积分关系为
(3)
式中:S-包围永磁体空气介质闭合面;n-面积dS的外法线方向的单位矢量;B-闭合面S上的磁感应强度;μ-空气的磁导率。
2.2 吸附装置仿真对比分析
吸附装置由5块永磁体基于Halbach阵列永磁体充磁方向特性,进行组合排列如图4。a,b,h(50 mm×30 mm×10 mm)分别表示永磁体的长宽高,轭磁铁分别包裹在阵列的上侧和两端,用w表示,数值为5 mm。

图4 吸附装置示意图
吸附装置在静态磁场分析涉及的材料有壁面,轭磁铁,永磁体以及空气。在计算中,考虑壁面的厚度与面积足够大,将其简化为线性材料,相对磁导率μrec设为2 000,空气的相对磁导率设为1.0,轭磁铁选用Q235钢,相对磁导率为5 000。永磁体材料采用高性能的稀土材料钕铁硼N35。其性能见表1。

表1 钕铁硼N35性能参数
基于Maxwell平台,对一组永磁体水平磁化排列形式的Halbach阵列,分别进行有轭磁铁和无轭磁铁的仿真,在没有轭磁铁的情况下,Halbach阵列无法形成单边磁场,在Halbach阵列上侧和两侧有磁力线分布如图5。在增加轭磁铁的情况下, Halbach阵列上部无磁力线,但是两侧仍有少量的磁力线如图6。
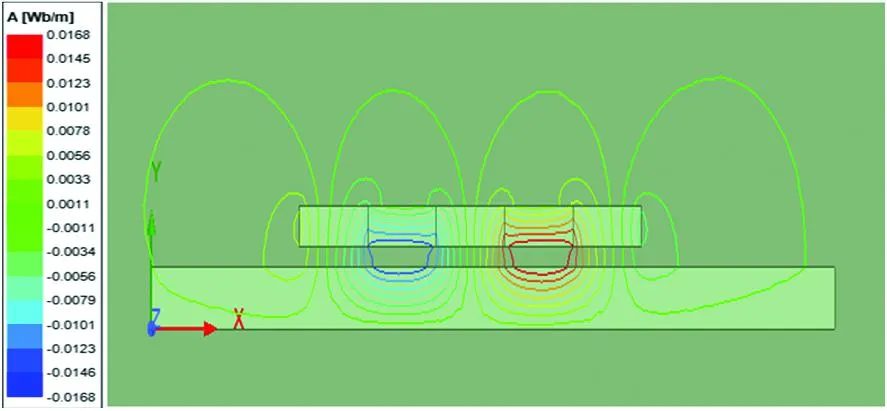
图5 无轭磁铁磁力线分布图

图6 有轭磁铁磁力线分布图
对一组永磁体水平磁化排列形式的Halbach阵列,有轭磁铁和无轭磁铁的两种吸附装置吸附力对比。有轭磁铁的吸附装置吸附力为F1,无轭磁铁的吸附装置吸附力为F2,通过对比可知,当气隙D小于14 mm时,F1大于F2,当气隙D大于14 mm时,F1与F2基本相等,对比图如图7。
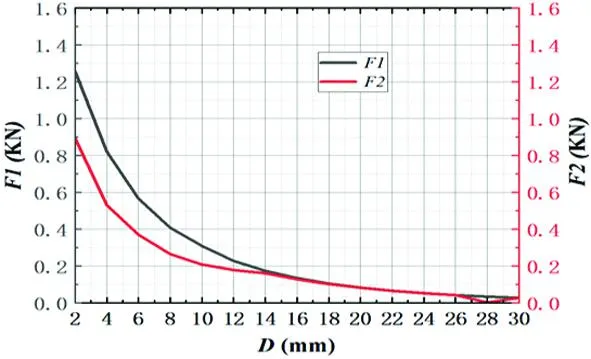
图7 两种吸附装置吸附力对比图
仿真结果表明,增加轭磁铁虽然无法达到预期目标,消除吸附装置上侧和两侧弱磁,但是可以消除吸附装置上侧磁场,减弱两侧磁场,并且增加了吸附装置在气隙D小于14 mm时的吸附力。所以本吸附装置采用增加轭磁铁的吸附方案。
根据Halbach阵列磁铁充磁方向的特点,提出两种不同排列方式的Halbach吸附阵列,对两种排列方式在气隙为10 mm进行仿真分析,仿真结果如图8。其中,图8a为永磁体垂直磁化排列形式开始,图8b为永磁体水平磁化排列形式开始。通过仿真图可知,在垂直磁化的永磁体底部与壁面之间形成强磁场,第一种排列形式有三处强磁场,第二种排列形式有两处强磁场。两种排列对壁面的吸附力对比如图9。在气隙2mm≤D<18mm时,第一种排列方式的吸附力F1大于第二种排列方式的吸附力F2,当D≥18mm时,F1和F2基本相等。气隙D=10mm时,第一种排列形式对壁面的吸附力为F1=339.7N,第二种排列形式对壁面的吸附力为F2=225.8N,第一种排列方式相比于第二种排列方式,吸附力提高51%。因此,本设计的吸附装置中永磁体充磁方向选择第一种排列方式。
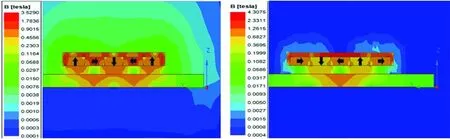
(a)第一种排列形式 (b)第二种排列形式
综上所述,吸附装置增加轭磁铁可以消除吸附阵列上侧的弱磁,但吸附阵列两侧仍有少量漏磁,增加轭磁铁还可以提高在气隙D小于14 mm时吸附装置的吸附力。Halbach阵列的垂直磁化处与壁面会形成强磁场,在相同数量的永磁体拼接而成的Halbach阵列中,选择永磁体垂直磁化多的排列形式,其吸附力大于永磁体垂直磁化数量少的排列形式。
3 吸附装置参数优化分析
为了探究永磁体长宽高和轭磁铁厚度对吸附力和吸附效率的影响,采用控制变量的方法,在不改变其他尺寸情况下,对某一个尺寸进行分析。仿真分析的材料属性与前相同,吸附装置的尺寸为初始值。运用上节所选的永磁体排列方式。首先定义一个重要的物理量。
定义单位体积吸附力Fv为
(4)
式中:Fv表示单位体积吸附力;Fv与永磁利用率成正比;Fmax吸附单元产生的吸附力;V吸附单元的体积。参数分析结果如图10。

(a)F、Fv随a的变化关系 (b)F、Fv随b的变化关系
在空气气隙厚度为10 mm情况下,研究F、Fv随a变化关系如图10a。F的数值随着a的数值增加而变大,呈线性关系。当0≤a≤35 mm时,Fv的数值随a的数值增加而快速增加,此时永磁利用率提高较大,当35 在空气气隙厚度为10 mm情况下,研究F、Fv随b变化关系如图10b。F和Fv的数值均随b的增加而增加,F的变化随b的增加呈线性增加,Fv的增速当b在30 mm左右时,增速变缓。 在空气气隙厚度为10 mm情况下,研究F、Fv随h变化关系如图10c。F的数值随着h的数值增加而变大,Fv的数值随着h的数值先增加后减小,当h在12 mm左右时,Fv的值最大,为4.46 N·cm-3,当12 在空气气隙厚度为10 mm情况下,研究F、Fv随w变化关系如图10d。当没有轭磁铁时,吸附力在245 N左右,当轭磁铁厚度w达到1 mm时,吸附力逐渐稳定在350 N附近,单位体积吸附力在4.6 N·cm-3左右。当轭磁铁厚度继续增加,F的数值基本保持不变,Fv的数值呈线性减小。 综上所述,影响吸附装置吸附性能的参数较多,相互关系非常复杂,虽然通过改变某个参数值并固定其他参数值得出其对于吸附性能的影响,但是如何在所有参数共同变化下得出最优的参数值,较为困难。根据上述分析结果,在吸附装置的尺寸为初始值,空气气隙厚度为10mm情况下,b与h保持初始尺寸对永磁利用率影响不大,a与w的初始尺寸改变对永磁利用率有较大影响,同时考虑到吸附装置在机器人底部安装的尺寸要求,笔者不改变b与h的初始尺寸,仅对a与w的初始尺寸进行优化。轭磁铁可以增加吸附装置的吸附力,其原因是轭磁铁的磁聚效应,增强了吸附装置与壁板间的磁场强度,从而增加吸附装置的吸附力,但并不影响Halbach阵列固有的磁场性能,所以a与w相互之间不存在干扰。 优化后的吸附装置尺寸a,b,c分别为35 mm,30 mm,10 mm,轭磁铁厚度w为1 mm,优化后的单位体积吸附力由 4.28 N·cm-3增加至 5.19N·cm-3,提升率为 21.2%,磁吸附效率得到了提高。 以储罐爬壁机器人的永磁吸附装置为研究对象,设计了基于Halbach阵列的吸附装置并进行优化,主要结论如下: (1)吸附装置增加轭磁铁可以消除吸附阵列上侧的弱磁,但吸附阵列两侧仍有少量漏磁,并且增加轭磁铁可以提高吸附装置的吸附力。 (2)垂直磁化的永磁体主要起到产生吸附力的作用,在相同数量的永磁体拼接而成的Halbach阵列中,选择永磁体垂直磁化多的排列形式,相比于永磁体垂直磁化数量少的排列方式,吸附力更大。 (3)在气隙10 mm时,永磁体的高度尺寸不宜过大,超过12 mm临界值时,永磁利用率开始降低。轭磁铁厚度临界值为1 mm,超过1 mm后,单位体积吸附力开始减小,故轭磁铁厚度w的值不能太大,否则影响永磁利用率。 结合上述结论,笔者对储罐爬壁机器人的吸附装置进行了结构优化,仿真结果显示磁吸附效率得到了提高。4 结 论
猜你喜欢
英语世界(2023年11期)2023-11-17 09:24:24船海工程(2022年6期)2023-01-02 13:05:12力学学报(2022年6期)2022-07-10 13:13:38中国特种设备安全(2021年12期)2021-04-26 14:37:12机电工程(2020年10期)2020-11-04 01:29:46石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22 01:39:48新农业(2018年3期)2018-07-08 13:26:56新农业(2018年3期)2018-07-08 13:26:56广东石油化工学院学报(2016年6期)2016-05-17 05:17:29电源技术(2016年9期)2016-02-27 09:05:45