太阳能增程式电动轻卡开发设计与试验研究
2024-03-24 10:43宾仕博韦尚军谢鹏鹏高停李世强
汽车与驾驶维修(维修版) 2024年2期
宾仕博 韦尚军 谢鹏鹏 高停 李世强

摘要:本文针对纯电动轻卡续航里程不足问题,开展太阳能增程式电动轻卡设计及试验研究。在某品牌电动轻卡上设计加装四块A 级单晶硅光伏板,通过MPPT 技术和能量管理合理分配给整车续航充电,最终通过整车路试试验分析太阳能光伏板发电量有效利用率,以及整车续航里程随光照强度和温度变化规律。试验结果表明,太阳能光伏板发电量最大有效利用率达到96.6%,每天续航里程增幅最低10%,最高达19%;相同条件下,整车续航里程随光照强度和温度呈近线性递增关系。
关键词:太阳能增程式;续航里程;电动轻卡;光照强度;温度
中图分类号: U469.72 文献标识码:A
0 引言
随着“双碳”政策的推进实施和疫情后中短途城配物流的需求增大,电动轻卡在商用车市场迎来了发展的春天。电动轻卡产品技术日趋成熟,但续航里程不足仍然是其快速发展的最大瓶颈[1-2]。电动轻卡行驶至放电末端,车辆因电量不足无法正常行驶而求助于拖车,或司机对充电桩焦虑恐慌现象时有发生[3]。
市场上通常使用更大容量的电池包来增加续航里程,此技术不仅需要重新布置电池包的位置,还造成整车质量超重,直接带来成本增加[4-5]。采用發动机- 发电机组作为汽车增程器辅助系统,在电池电量耗尽前采用电力辅助装置发出电能来提高整车续驶里程,可以解决纯电动汽车续航问题[6-8]。
美国通用汽车雪佛兰Volt 采用逻辑门限值整车能量控制策略,通过设定不同的动力切换模式,车辆行驶初始阶段采用纯电动模式,当电池电量 SOC 消耗至初始状态的30% 时,辅助发电机组发电给动力电池充电,续航里程达到 570 km[9]。理想ONE采用大电池小发动机技术路线,搭载40.5000 kW · h 的三元锂电池组,匹配1.2T 三缸发动机和容量为45 L 的油箱,续航里程超过800 km。除此之外,国内市场还有传祺GA5、比亚迪秦、荣威550plug-in 以及北汽E150EV 等增程式汽车品牌,续航里程均能达到比较理想的目标[10]。
这种发动机- 发电机串联增程式技术在一定程度上可以解决续航里程问题,但因为还需消耗化石能源,能耗上未能真正达到零排放。因此,清洁能源增程式技术开始得到关注和研究。丰田汽车在其首款纯电动 SUV 上配置可选装的太阳能充电穹顶,直接给车载动力电池充电,每年可以增加1 750 km 的行驶里程[11]。
荷兰Lightyear 公司最新发布的太阳能电动汽车Lightyear0,通过配置5 m2 太阳能电池板,每天在不充电的情况下可行驶约70 km,在天晴情况下可连续行驶7 个月无需额外充电[12]。太阳能电动车增程式技术基于电动车能源系统的复合拓展,通过太阳能光伏板转化为电能,可直接给动力电池充电或为系统负载提供电源。这种增加续航里程的方式在技术上可行,并且在短途物流配送的商用车轻卡市场上具有较大的推广意义[13-14]。本文基于某电动轻卡,设计加装4 块A 级单晶硅太阳能发电板给动力电池包进行充电,通过整车路试试验研究太阳能光伏板发电量有效利用率及整车续航里程变化规律。
1 太阳能增程式电动轻卡设计
1.1 太阳能光伏发电系统设计
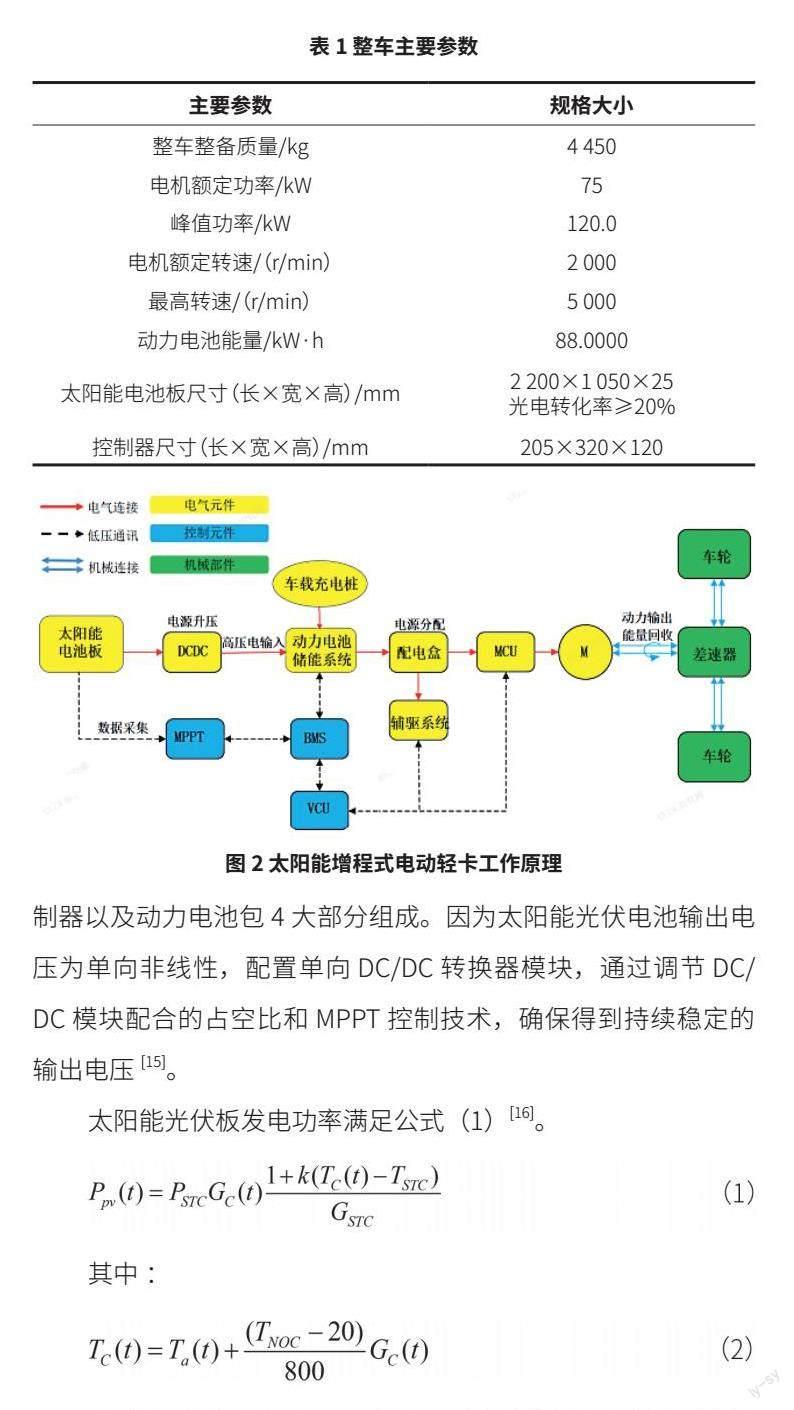
将4 块汉能集团A 级单晶硅太阳能光伏电池板并联安装在某商用纯电轻卡L2EV 车顶上,通过光伏电池板吸收太阳光照转换成电能向控制器输入,在控制器仪表上可以查看光伏电池板的实时发电量,并调节输出电压与电池包电压保持一致,从而稳定给动力电池包充电,实现增加续航里程(图1)。整车主要参数如表1 所示。
太阳能增程式电动轻卡工作原理如图2所示。整个发电系统主要由光伏发电板、DC/DC 转换器、太阳能控制器以及动力电池包4 大部分组成。因为太阳能光伏电池输出电压为单向非线性,配置单向DC/DC 转换器模块,通过调节DC/DC 模块配合的占空比和MPPT 控制技术,确保得到持续稳定的输出电压[15]。
式(1)和式(2)中:Ppv (t ) 为t 时刻单位面积光伏电源的输出功率数值,单位kW ;PSTC 为单位面积光伏电源在标准测试条件( 太阳辐射度为1 000 W/m2,环境温度为25℃ ) 下的输出功率数值,单位kW ;GC (t ) 为t 时刻的太阳辐射度数值,单位W/m2 ;GSTC 为标准测试条件下的太阳辐射度数值,单位W/m2 ;k 为功率温度系数;TC (t ) 为t 时刻光伏组件表面温度数值,单位℃ ;TSTC 为标准测试条件下的环境温度数值,单位℃;Ta (t ) 为t 时刻环境温度数值,单位℃ ;TNOC 为光伏组件额定电压工作温度数值,单位℃。
按标准的太阳光照强度和温度条件输入公式(1),得到单块太阳能光伏电池板的发电功率为1.5 kW,电压为150 V。将此发电量向太阳能控制器输入,使电流流向太阳能控制器。控制器通过CAN 总线与电池管理系统(BMS)调节电压电流,将150 V 的电压升高至动力电池包的充电电压给动力电池充电。动力电池通过电机控制器(MCU)的IGBT 功率模块向电动机提供电能。
1.2 整车能量管理系统设计
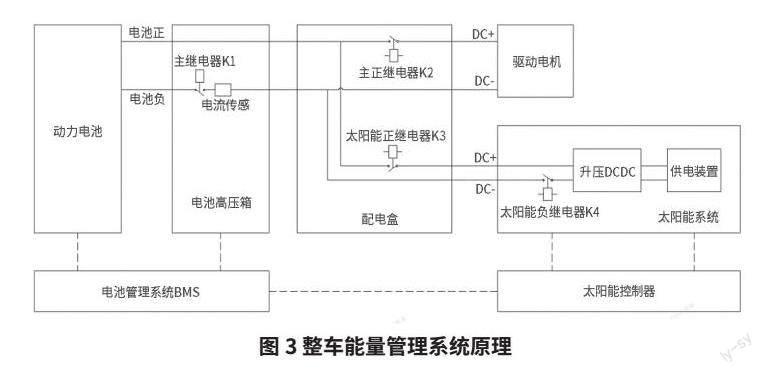
整车能量管理系统原理如图3 所示。能量控制逻辑为:当电池电量处于满电状态,整车为纯电动行驶模式,能量动力模型为“电池—电动机(减速机构)—车轮”;馈电状态时(≤ 95%),整车进入太阳能增程模式工作。太阳能光伏发电系统启动,通过算法产生控制开关管理的 PWM 脉冲信号来调节电路的占空比,控制单向DC/DC 变换器的MOSFET 晶体管。再使用MPPT 技术捕捉最高功率点,使光伏电池与系统的电压等级相匹配,得到持续稳定的最高输出功率[17]。在这种情况下,增程式电动汽车可以看成是一种串联式混合动力系统的工作模式,即:太阳能光伏电板—发电机—电池—电动机(减速机构)—车轮。
1.2.1 行驶工况
(1)低压蓄电池提供12 V 电压唤醒BMS,BMS 实时检测太阳能系统报文。若无相关通讯,BMS 报故障异常,禁止充电;太阳能系统同时也实时检测BMS 报文,若无相关通讯,太阳能系统报故障异常。
(2)两者通讯交互正常,车辆行驶过程,BMS 周期发送电池SOC、可允许充电电压、允许充电电流、温度和故障等报文信息,并向太阳能控制器发送指令:0x00 禁止充电。
(3)此时太阳能继电器K3/K4 断开,主负继电器K1 和主正继电器K2 闭合。车辆通过动力电池提供电能向驱动电机供电,驱动车辆行驶。
1.2.2 充电工况
(1)太阳能控制器唤醒无异常且交互正常,BMS 周期检测并发送电池SOC、可允许充电电压、允许充电电流、温度和故障等报文信息。太阳能控制器接受BMS 发送报文信息后,如电池SOC ≥ 95% 或有故障,则发送BMS-CMD 指令:0x00 禁止充电。
(2)当车辆SOC < 95%,车速为0 km/h,电机转速为0 r/min,驱动挡位处于P 挡,电池系统无输出功率请求,整车处于OFF 挡时,太阳能控制器接收到BMS 發出的报文信息并判断无故障条件后,太阳能控制器向BMS 发送指令:0x01 请求充电。
(3)BMS 检测自身参教及故障状态,闭合主负继电器K1,主正继电器K2 保持断开,开始向太阳能控制器发送BMS 指令:0x01 允许充电。
(4)太阳能控制器持续检测BMS 报文,接收到允许充电,开始闭合太阳能系统K3/K4 继电器,并发送充电电流和充电电压值。太阳能控制器检测温度和光照强度等信息,计算分析后按控制器充电Map 补能充电。
(5)当电池SOC 达到100% 或检测到故障(含硬件断开)等异常,太阳能控制器发送请求停止充电指令: 0x02 进入下电状态。太阳能继电器K3/K4 断开,主负继电器K1 断开,充电结束。如有异常则发送相关故障代码至BMS。
(6)如太阳能控制器持续发送5 s 内BMS 未接收到停止充电请求,可在5 s 后自动断开K3/K4 继电器结束充电,并发送故障异常,充电结束。
2 整车测试与试验验证
选择日光照时间较长的夏天连续开展7 天实车路试,每天测试时间从8:00 ~ 20:00。整车满载以 60 ~ 80 km/h 的车速行驶,SOC 从100% 直至10%,其他条件均保持一致,测试太阳能光伏电池板发电量有效利用率和续航里程变化情况,同时记录天气温度范围、光照强度和发电数据等(表2)。其中,太阳能光伏电池板发电量有效利用率等于有效使用发电量(功率分析仪读取)除以实际发电量(控制器表盘读取)。
从表2 的试验记录数据, 可以计算得到太阳能光伏电池板发电量有效利用率达到96.6%,说明太阳能发电除了少量的自身耗损之外,基本全部用于整车驱动。同等试验条件下,与没有安装太阳能光伏发电的续航里程198 km 相比,安装太阳能光伏发电板实现了19 ~ 37 km/ 天的里程增程,续航增幅最低10%,最高能达到19%。
由式(1)可以看出,最大光照强度和温度是影响光伏发电的两个最主要因素。保持同等试验条件下,研究最大光照强度和温度对发电量的影响规律。图4 为发电量随最大光照强度变化规律,图5 为发电量随温度变化规律,由图4 和图5 可以看出,太阳能光伏系统发电量随光照强度和温度增大呈近似线性递增关系。同理,本文设计的太阳能增程式电动轻卡续航里程随光照强度和温度增大呈近似线性递增关系。
3 结束语
本文采用的太阳能增程式电动轻卡设计开发路线技术可行。同等试验条件下,与没有安装太阳能光伏发电的续航里程相比,安装太阳能光伏发电板实现了19 ~ 37 km/ 天的里程增程,续航增幅最低10%,最高能达到19%。本文采用的太阳能光伏电池板发电量有效利用率达到96.6%,太阳能增程式电动轻卡续航里程随光照强度和温度增大呈近似线性递增关系。
【参考文献】
[1] 陈勇, 魏长银, 李晓宇, 等. 融合工况识别的增程式电动汽车模糊能量管理策略研究[J]. 汽车工程,2022, 44(04):514-524+600.
[2] 王敖, 聂金泉, 黄燕琴, 等. 电动汽车复合储能系统的能量管理策略研究进展[J]. 汽车实用技术,2023, 48(14):7-13.
[3] Puma-Benavides D S, Izquierdo-Reyes J, Calderon-Najera J D,et al. A Systematic Review of Technologies,Control Methodsand Optimization for Extended-Range Electric Vehicles. AppliedScience,2021(11):7095.
[4] Stark J,Wei C,Trigui R,et al.Electric Vehicles with Range Extenders:Evaluatingthe Contribution to the Sustainable Development of Metropolitan Regions.Journal of Urban Planning and Development,2018,144(1):4017023.
[5] 杨志鹏. 新型增程式电动汽车动力传动系统设计及其控制策略研究[D].重庆: 重庆大学,2013.
[6] 龙克俊. 增程式电动汽车动力系统参数匹配与效率优化控制研究[D]. 重庆: 重庆理工大学,2018.
[7] 刘光隆, 蔡永明, 常健, 等. 增程式电动汽车再生制动控制策略仿真研究[J]. 汽车科技,2020 (03):22-26.
[8] 郭凯. 增程式电动汽车研究分析[J]. 汽车实用技术,2020,19(01):5-9.
[9] 邱香, 李红英. 增程式电动汽车发展分析[J]. 时代汽车,2021,2(01):95-96.
[10] 李峰, 丁玲, 史育海, 等. 增程式电动汽车能耗测试仿真试验研究[J]. 汽车科技,2023(01):44-50.
[11] Mobarak M H, Kleiman R N, Bauman J. Solar-Charged ElectricVe h i c l e s : A C ompre h e n s i ve A n a l y s i s o f G r i d , D r i ve r, a n dEnvironmental Benefits. IEEE Transactions on Transportation Electrification,2021,7(02):579-600.
[12] Xiao B, Ruan J, Yang W, et al. A review of pivotal energ ymanagement strategies for extended range electric vehicles.Renewable and Sustainable Energy Reviews, 2021,149:11119.
[13] 劉新磊, 邱天昱, 赵星洋. 太阳能汽车关键技术发展综述[J]. 机械研究与应用,2019,32(02):211-214.
[14] 伍赛特. 太阳能汽车研究现状及未来技术路线展望[J]. 交通节能与环保,2020,16(77):5-8.
[15] 邵文权, 王猛, 吴朝俊, 等. 基于改进滑模控制的光伏系统MPPT 控制策略[J]. 太阳能学报,2021,42(10):87-93.
[16] 毛涛涛, 潘国兵, 欧阳静, 等. 太阳能汽车续航模型及光储优化配置方法[J]. 机电工程,2018,35(01): 68-73.
[17] 王祖斌. 配置光伏变换器电池的电动汽车数学模型研究[J]. 科技创新与应用,2023(0×9):86-89.
作者简介:
宾仕博, 博士, 高级工程师,研究方向为新能源汽车动力系统设计、智能网联汽车。
猜你喜欢
中学生数理化·八年级物理人教版(2021年10期)2021-11-22
疯狂英语·新读写(2021年8期)2021-11-05
小学生优秀作文(高年级)(2018年4期)2018-09-11
中学生物学(2017年2期)2017-03-20
现代农业科技(2017年1期)2017-03-06
湖南师范大学学报·自然科学版(2016年3期)2016-06-25
少儿科学周刊·儿童版(2016年1期)2016-03-14
山东青年(2016年2期)2016-02-28
山东青年(2016年1期)2016-02-28
热带农业科学(2015年7期)2015-08-11