
一种500 kV接地开关传动机构缺陷改进措施
2024-03-22 08:27:18邱祥松蔡雁南
云南电力技术 2024年1期
邱祥松,蔡雁南
(云南电网有限责任公司红河供电局,云南 蒙自 661100)
0 前言
接地开关在高压系统中有着极重要的作用,红河供电局500 kV红河变电站、500 kV惠历变电站500 kV隔离开关均为阿海珐SPOL-T-2T 2SPOL-T-2T-3T 500 kV、SPVLT 500 kV型隔离开关,据不完全统计整个南网范围内2017年11月份广东电网揭阳供电局500 kV榕江变电站接地开关伞形齿轮卡涩变形;2018年9月份500 kV红河变500 kV巡检司红河线543367接地开关A相齿轮滑牙;2018年11月份500 kV红河变隔离开关B修时由于齿轮卡涩接地开关无法合闸;2018年6月份文山供电局500 kV砚山变接地开关伞形齿轮变形。由此可见此缺陷为该种隔离开关的家族性缺陷。
通过分析其缺陷原因找到解决方案,对于完善该种接地开关的性能,降低故障率,降低停电时间,保障高压电力系统安全稳定运行具有重要意义。
1 接地开关在高压系统中的作用
在高压系统中接地开关是使用数量最多的高压电气设备,在日常的运行、检修和倒闸操作中具有非常重要的作用,检修过程中防止检修过程中突然来电,检修与维护时保护人员安全检修设备各侧必须可靠接地。
另一方面同塔双回路平行架空高压输电线路日渐增加,设三相线路为均匀、对称,再忽略线路电阻、对地电导。因长距离输电线路具有分布参数特征,故按通用长线路方程可得线末电压u2和线末电流i2为已知值时的无损耗线路稳态方程为:
式中参数可参见图1所示单相空载长线路图。Ux和Ix为以线路末端作起点计算距离为x处的线路电压和电流;α为线路相位系数,z为无损耗线路的波阻抗,,L0和C0为线路单位长度的电感、电容。

图2 损坏的齿轮机构

图3 拐臂传动机构实物图

图4 齿轮传动机构俯视图
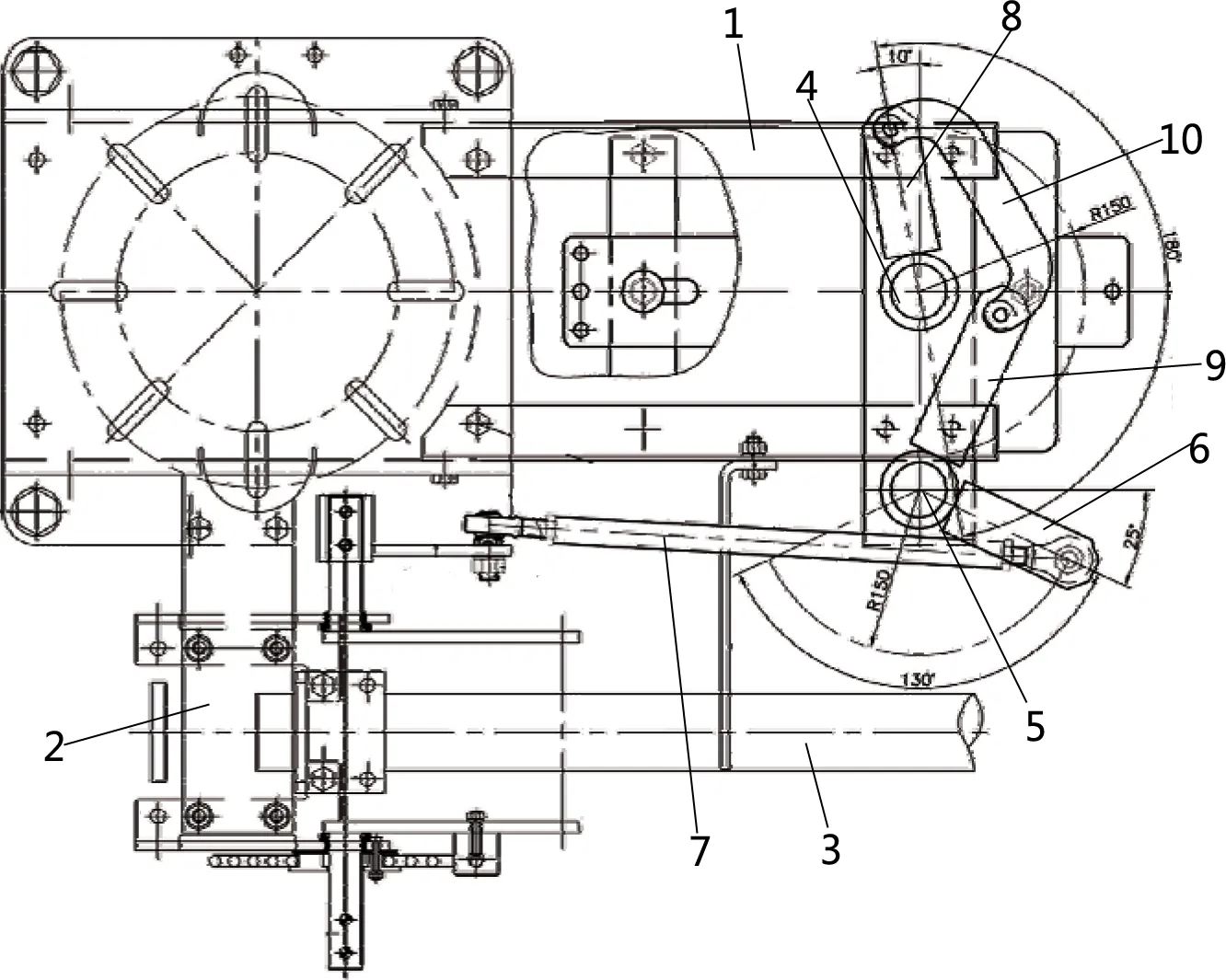
图5 拐臂传动机构俯视图
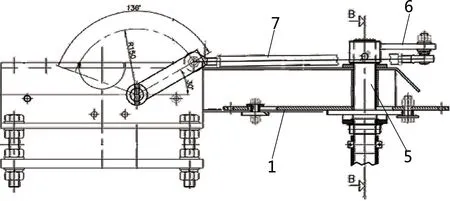
图6 拐臂传动机构侧视图
对于空载长线路,iI2=0,且已知线路长度l时有:
据上分析,均匀无损耗空载线路沿线电压分布呈余弦规律,线路各段导线中的电容电流值不同,沿线电压升高不均匀,线路末端电压最高。
对靠近出线侧的接地开关具备开合感应电流成为高压接地开关的一种特殊运行条件。对出线侧接地开关当停电线路一端开路时,要求另一端的接地开关能开合容性电流。当线路一侧接地,要求另一侧接地开关能开关感性电流。
当线路发生单相接地故障时,故障相两侧断路器断开,健全相仍接于电源持续运行,健全相线路的工作电压、线路负载电流、通过相间互电容和互感对被切除的产生静电感应和电磁感应,使故障相仍能维持一定的接地电流,该电流即为潜供电流。该电流对线路非永久故障时的重合闸动作有较大的影响。因此对于靠近出线侧的接地开关需要能短时间承载潜供电流,在故障点熄弧后打开接地开关切断正常相与故障相电磁耦合产生的潜供二次燃弧配合实现重合闸。
2 案例
2012年4 月红河供电局检修一班对红砚甲线5413断路器间隔进行预试B修工作,在工作过程中发现500 kV红河变红砚甲线541367接地开关齿轮发生打滑现象地刀无法合闸到位,检修班特邀请厂家人员进行现场指导工作,发现地刀无法合闸是因为分闸时齿轮受到强大的作用力导致的齿轮滑牙。于是对红砚甲线541367接地开关齿轮进行更换。
更换工作主要包含:
1)工作前的准备工作。
2)拆除接地开关的垂直连杆与水平连杆,将接地开关齿轮部分相关螺丝拆除。
3)手动将接地开关至于合位,连接传动部分的拐臂。
4)齿轮的安装,这是最困难也是最重要的一步,因为操作空间狭小,上方传动齿轮定位销装入耗时耗力,而且还容易损坏接地开关齿轮。旋转齿轮位置,使齿轮啮合到最佳位置,将上方传动齿轮定位销位置调整于背对绝缘瓷瓶位置,下方齿轮定位缺口正对定位螺丝,将齿轮定位,扭紧齿轮上、下方定位连接片。
5)连接垂直连杆,将机构箭头置于合位,扭紧垂直连杆下方抱箍,手动分闸查看接地开关分闸位。逐步调整直至接地开关分合闸位置符合要求。
整个的更换过程耗时两天,一套齿轮机构一套三万块。由于更换难度大,更换时损坏了一套。
3 齿轮传动机构损坏变形的原因
3.1 理论分析
考虑地刀杆力矩最大时为分闸即将到位、地刀杆水平的位置时,齿轮在分闸过程中损坏。地刀分闸过程为:地刀驱动杆与垂直连杆之间水平距离为400 mm,垂直连杆旋转角度为180°,水平的伞形齿轮的旋转角度为180°,与地刀杆连接的拐臂的旋转角度为130°。齿轮处拐臂长度162 mm,地刀杆处拐臂长度180 mm,通过空间连杆带动接地刀处的地刀同步动作机构向顺时针方向旋转130°运动使地刀杆动作,使地刀杆向下脱离静触头,再由垂直方向运动到水平方向实现分闸到位。
分闸过程中机构带动地刀杆从静触头滑出,此时地刀杆的重量会反作用驱动地刀杆自动往分闸方向转动,因为地刀传动结构间歇较大,这时就会对地刀底座的齿轮产生较大冲击力,合闸过程中同样有很大的作用力作用到齿轮上,而且由于地刀驱动杆与垂直连杆之间水平距离为400 mm导致齿轮不能设计得过大,齿轮啮合的受力半径太小,齿轮受力过大,导致齿轮滑牙甚至损坏。
而且齿轮结构对装配工艺的要求较高,安装难度大,耗时耗力,容易损坏。安装接地开关时,垂直转轴安装不垂直,两伞形齿轮安装时轴线不在同一条中心线上,啮合的角度不对、啮合得过于紧或者啮合深度不够都会减小受力的面积,增加齿轮间的作用力,同样的力矩的情况下齿轮面将受到很大的作用力,使齿轮出现滑牙、变形的情况,导致水平拉杆在隔离开关分合闸操作时所受阻力增大,甚至出现卡顿、变形现象。
3.2 数据分析
原始数据及合理化假设:地刀杆3总长L:3875 mm,壁厚d:5 mm,材质为铝材质密度为2700kg/m3,外径S:70 mm;取地刀杆的重力为均布载荷,重心在刀杆的重心位置,考虑地刀杆力矩最大时作受力分析(分闸即将到位、地刀杆水平的位置)。以下计算不考虑传机械传动损失,忽略地刀杆在整个过程中是运动的,只做理想状态分析,此处的得到的计算数据与实际值相比偏小。
齿轮传动机构受力分析:
地刀杆的最大力矩M不变为:207.3N·m
理想状态下结构力的传动传动过程中,力距大小不产生变化。因此直接作用在老结构的编号187齿轮的力矩M1即207.3N·m。
作用该处锥齿轮上分度圆直径为Dp=66 mm=0.066 m,该处分度圆圆周力为:
该锥齿轮压力角(taper gear pressure angle)α为20°,因此作用在锥齿轮上齿面法向载荷为:
由于空间有限,增大模数、增大齿数、增大压力角等对齿轮的改造很难实现,而且增加有色金属的使用增加成本,不能从根本上较大的提高齿轮的疲劳强度,锥型齿轮受力较大,导致齿轮处容易产生间隙,长期运行后更会导致齿轮面啮合不到位,齿条崩坏的结果。因此本文提出使用拐臂传动机构代替齿轮传动机构,从根本上解决地刀底座齿轮滑牙、变形,导致地刀不能合闸的缺陷情况出现。新结构在主刀为轴以及拐臂的固定传动力,拐臂受力较小,不容易产生变形。
4 拐臂传动机构动作原理及力学分析
拐臂传动机构的动作原理就是,在地刀同步动作机构与隔离开关操作机构间实现转动角度的过渡转变,将垂直连杆5的180°的转动角度转变成地刀同步动作机构2的130度的转动角度,垂直连杆5顺时针(逆时针)的运动实现合(分)闸。
4.1 地刀合闸动作过程
电动机构箱驱动垂直连杆5转动通过绝缘子底座上的拐臂传动机构,将隔离开关操作机构的180°转动角度转变成地刀同步动作机构2的130°的转动角度,垂直连杆5与主动拐臂8一起顺时针旋转180°,将与之连接的过渡拐臂10及过渡拐臂9与被动拐臂6组成一套空间四连杆传动,被动拐臂6长度为150 mm,通过过渡拐9的转动使与之连接的被动拐臂6转动,传动角度由180°转变成130°,并通过空间连杆7带动接地刀处的地刀同步动作机构2向逆时针方向旋转130°运动使地刀杆动作,使地刀杆3由水平转动到垂直方向再向上运动进入静触头,实现合闸到位。由于地刀同步动作机构在本次专利中未涉及就不进行详细的介绍。
4.2 地刀分闸动作过程
分闸操作动作过程就是合闸动作的反向运动,电动机构箱驱动垂直连杆5转动通过绝缘子底座上的一套水平过渡四连杆传动,垂直连杆5与主动拐臂8一起逆时针旋转180°,将与之连接的过渡拐臂9及过渡拐臂10与被动拐臂6组成一套空间四连杆传动,被动拐臂6长度为150 mm,通过过渡拐9的转动使与之连接的被动拐臂6转动,传动角度由180°转变成130°,并通过空间连杆7带动接地刀处的地刀同步动作机构2向顺时针方向旋转130°运动使地刀杆动作,使地刀杆3向下脱离静触头,再由垂直方向运动到水平方向实现分闸到位。由于地刀同步动作机构在本次专利中未涉及就不进行详细的介绍。
4.3 数据分析
拐臂传动机构受力分析:地刀杆重质量为:
地刀杆的重力:
地刀杆的最大力矩为:
理想状态下,结构力在传动过程中,力距大小不产生变化。因此直接作用在新结构的中主动拐臂8上的力矩即207.3N·m。
主动拐臂8长度为L1=150 mm=0.15 m,作用主动拐臂8上的力为:
综上:对比新老结构受力分析情况可得,在理想状态下F2=4.8F,老结构齿轮处受力6684.9 N,新结构与垂直连杆连接的主动拐臂处受力为382 N,老结构齿轮处受力为新结构主动拐臂受力大小的4.8倍。而且拐臂传动机构各部分接触为面接触,相对于齿轮传动机构的点接触,能更加有效地增大零部件疲劳强度。
新的机构没有对电机部分和地刀部分做更改。拐臂结构制造工艺简单,装配方便,利用连杆结构代替齿轮结构,改变了传动部件整体的力学性能,主动拐臂长度为150 mm而齿轮分度圆半径只有33 mm,齿轮高为33 mm。相比之下,可以说齿轮的受力长度是很小的,通过主动拐臂增大了受力长度在相同力矩的时候减小了受力的大小,有效地防止齿轮滑牙甚至损坏的情况出现。过渡拐臂设计为C型拐臂,节省空间的同时增大了旋转的角度,在改善结构性能的同时减少了有色金属的使用,装配更加便捷,有效降低材料成本,装配成本。在操作杆轴向位移的同时,平衡弹簧按预定的要求储能或释能,最大限度地平衡接地刀杆的重力矩,以利于接地刀杆的运动。
5 结束语
本文通过实际案例、理论分析、数据计算对阿海珐SPOL-T-2T 2SPOL-T-2T-3T 500 kV、SPVLT 500 kV型隔离开关接地开关底座齿轮机构卡涩、滑牙、变形的情况进行分析得出以下结论:
阿海珐SPOL-T-2T 2SPOL-T-2T-3T 500 kV、SPVLT 500 kV型隔离开关接地开关底座齿轮机构卡涩、滑牙、变形的情况在实际使用中各变电站内普遍存在,分闸过程中机构带动地刀杆从静触头滑出,地刀传动结构间歇较大,对地刀底座的齿轮产生较大冲击力,导致齿轮滑牙、变形。
计算分析结果显示齿轮传动机构中,齿轮的受力大小是拐臂传动机构,主动拐臂与垂直连杆间作用力的4.8倍,是造成齿轮机构容易损坏的最直接原因。
本文提出的拐臂传动机构在改善结构性能的同时减少了有色金属的使用,减少有色金属的使用,加工工艺要求没有齿轮机构高,装配更加便捷,有效降低装配成本、加工成本。
猜你喜欢
金属加工(热加工)(2022年9期)2022-09-20 06:16:16
科技与创新(2022年11期)2022-06-14 01:45:56
水电站机电技术(2021年12期)2021-12-21 03:12:50
设备管理与维修(2020年23期)2021-01-04 00:15:14
数字通信世界(2019年3期)2019-04-19 12:42:14
电子制作(2016年11期)2016-11-07 08:43:37
电测与仪表(2015年20期)2015-04-09 11:53:46
水电站机电技术(2014年4期)2014-10-13 08:30:12
机电信息(2014年27期)2014-02-27 15:54:02
河南科技(2014年4期)2014-02-27 14:07:19
