
基于模糊数学的挖掘机整机性能评价研究
2024-03-21 07:21嵇秋池
矿山机械 2024年3期
王 飞,冯 涛,嵇秋池
1徐州徐工挖掘机械有限公司 江苏徐州 221001
2中国矿业大学机电工程学院 江苏徐州 221001
挖 掘机作为多用途土石方施工机械,在市政工程、矿山开采、水利建设等领域应用广泛。其生产厂家根据市场需求进行产品定位,研发具有性能梯度的产品类型。挖掘机的整机性能是占据市场的关键,客户满意度是评判其性能的金指标[1]。
文献 [2]基于失效分析方法对挖掘机终端数据加以利用,结合客户使用感受,评估挖掘机可靠性。文献 [3]基于模糊数学方法进行轮式挖掘机模糊评价,利用车载终端数据,减少试验分析成本。文献 [4]基于灰色综合评判方法对液压挖掘机性能进行评价,但其评价因素权重参考专家意见,主观因素影响较大。文献 [5]基于模糊层次分析法对挖掘机液力缓速器进行制动性能综合评价,权重系数采用线性加法合成,评价因素值较为精确。文献 [6]基于多因素综合评价方法对挖掘机动作协调性进行量化评分,采用层次分析法确定权重,构造判断矩阵,将专家或操作手的经验经数学转化成权重系数,评价结果更加客观。
基于此,笔者采用模糊数学结合多因素评价方法,对挖掘机整机性能进行综合评价与分析,在对标基础上确定评价因子,进而评判挖掘机整机性能优劣,而后得到 4 款挖掘机整机性能模糊评价因子,最后结合试验结果证明评价方法的准确性。
1 模糊评价
1.1 评价项目与因素
评价项目应来自挖掘机常用动作,如,工作装置单动作、行走、回转、复合动作以及整机操作;评价因素应根据各个项目的特点制定,如,整机性能应关注经济性、可靠性、舒适性、操作性,单动作、复合动作应关注响应、速度、冲击、稳定性、协调性等;评价分数应基于操作手的操作感受,借助对标法,操作手同时对多台挖掘机某一因素进行评价、比较,做出优劣判断,并分别赋予相应的分值,便可实现数据量化。
1.2 评价权重
笔者根据挖掘机整机性能,确定经济性、可靠性、舒适性、操作性为评价因素,采取百分制评价标准,表1 为其含义与解释[7]。

表1 百分制评价标准Tab.1 Evaluation standard of hundred mark system
1.3 模糊评价方法
挖掘机整机性能评价因素主要为经济性、可靠性、舒适性、操作性,模糊综合评判可综合各个因素之间的联系与对立性,其评判步骤如下[7]:
(1) 确定被评判系统的影响因素集合U,相关因素u1、u2、u3等为集合U的元素,即U={u1,u2,u3,…,un}。例如,在挖掘机整机性能中,u1、u2、u3分别表示经济性、可靠性、舒适性。
(2) 确定评判系统的评判集合V,相关评语v1、v2、v3等为集合V的元素,即V={v1,v2,v3,…,vn}。例如,评判挖掘机操作性能,v1、v2、v3分别表示u1、u2、u3性能,可用 “很好”、“好”、“较好” 评判。
(3) 确定权重集合,对集合U而言,各个影响因素程度不同,设权重集合A={a1,a2,a3,…,an},权重集合应满足
(4) 构建综合评判矩阵,对影响因素ui进行评判,得到综合评判矩阵
设挖掘机性能影响因素数值集合为B,B={b1,b2,b3,…,bn},则rij可定义为
(5) 进行模糊变换,通过模糊线性变换得到综合评判S,即
2 评价结果与分析
采用对标法确定各因素,操作手同时对多台挖掘机某一因素进行评价、比较,做出优劣判断,并分别赋予相应分值,便可实现数据量化[8]。选取低端机型、中端机型、高端机型与试验样机进行对标,4 台挖掘机整机性能分析如表2 所列。根据相关学者对整机性能影响因素的研究[9],将 4 台挖掘机经济性、可靠性、舒适性、操作性赋予权重分析,权重集合A={a1,a2,a3,a4}={经济性,可靠性,舒适性,操作性}={0.3,0.2,0.1,0.4}。
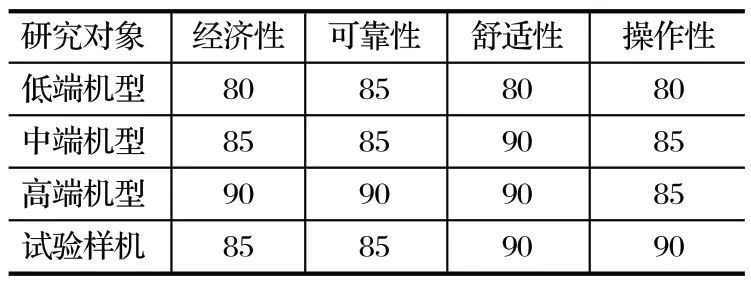
表2 4 台挖掘机整机性能分析Tab.2 Analysis of machine performance for four excavators %
根据表2、式 (2) 得到 4 台挖掘机整机性能评价矩阵为
经计算,4 台挖掘机整机性能评价因子分别为0.933 1、0.949 6、0.998 2 和 0.949 9,可知,试验样机是较优的机型,与高端机型最相近,比中端机型高。试验样机整机操作性优越,并兼具经济节能性、舒适可靠性。
3 试验验证
3.1 试验平台搭建
试验地点为徐州地区某测试场,东经 117°,北纬 34°。试验平台如图1 所示,在驾驶室左前、左后、右前、右后悬置主、被动侧布置加速度传感器,采集悬置主、被动侧加速度信号,评估驾驶室悬置的隔振性能;在司机位置处布置麦克风,采集噪声信号,评估驾驶室隔音性能,测点位置如图1(a)、1(b)所示。在发动机铲斗、斗杆和动臂安装位移传感器,采集其工作装置单动作、动臂提升加回转时间,研究其工作装置单动作、复合动作性能;在回转平台安装陀螺仪,采集回转速度、回转制动角度,研究其回转性能,测点位置如图1(c)、1(d) 所示。试验采用多通道 Dewesoft 数据采集系统、PCB 加速度传感器、TESTO 麦克风、基恩士位移传感器以及 KYOWA 陀螺仪,将物理信号转换为时域信号,经数据处理得到试验结果。试验设备如表3 所列。
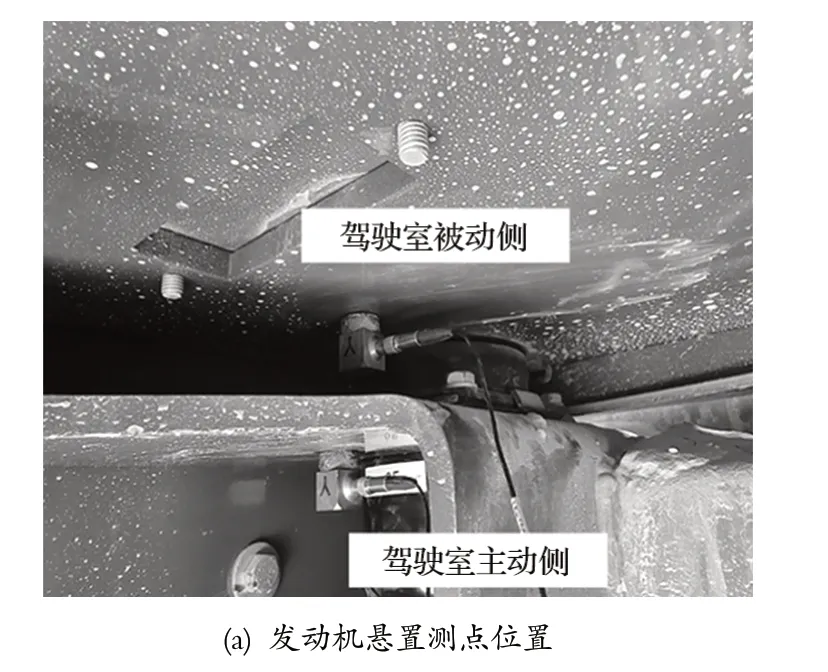
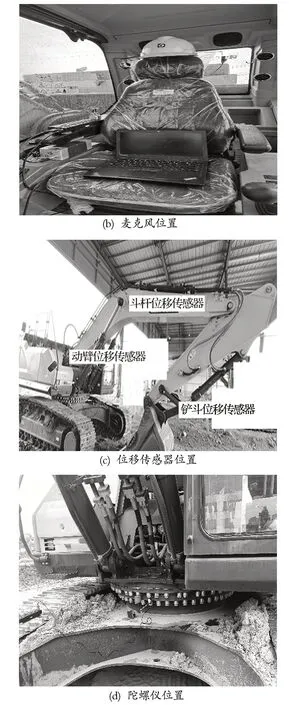
图1 试验平台Fig.1 Experimental platform
表3 试验设备Tab.3 Experimental equipment

表4 动臂提升加回转测试数据Tab.4 Experimental data of boom lifting and rotation
3.2 试验结果与讨论
振动噪声试验以其主要作业工况为研究对象最为合理,这样舒适性研究与实际更相符。振动频率带宽选择 1 280 Hz,分辨率选择 1 Hz;驾驶室噪声频率带宽选择 10 240 Hz,分辨率选择 1 Hz。振动采用实地挖掘方式,按挖掘、提升、回转和甩方 4 种动态循环姿态;驾驶室噪声应在门、窗关闭并且空调开启下进行试验,挖掘机按挖掘、提升、回转和甩方 4 种静姿态进行模拟挖掘。图2(a) 为驾驶室声压级随发动机转速变化曲线,由图2(a) 可知,试验样机隔噪性能优越,驾驶室降噪表现良好,与高端机型相比,仅大1.3 dB 左右。悬置作为连接动力总成和回转支承的弹性元件,具有衰减振动传递能量的作用,其隔振性能的好坏直接影响驾驶室振动强度。隔振率是评价悬置隔振性能的重要参数,如式 (6) 所示[10]。
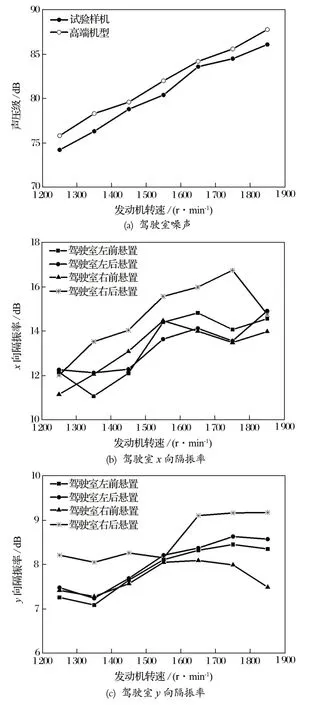
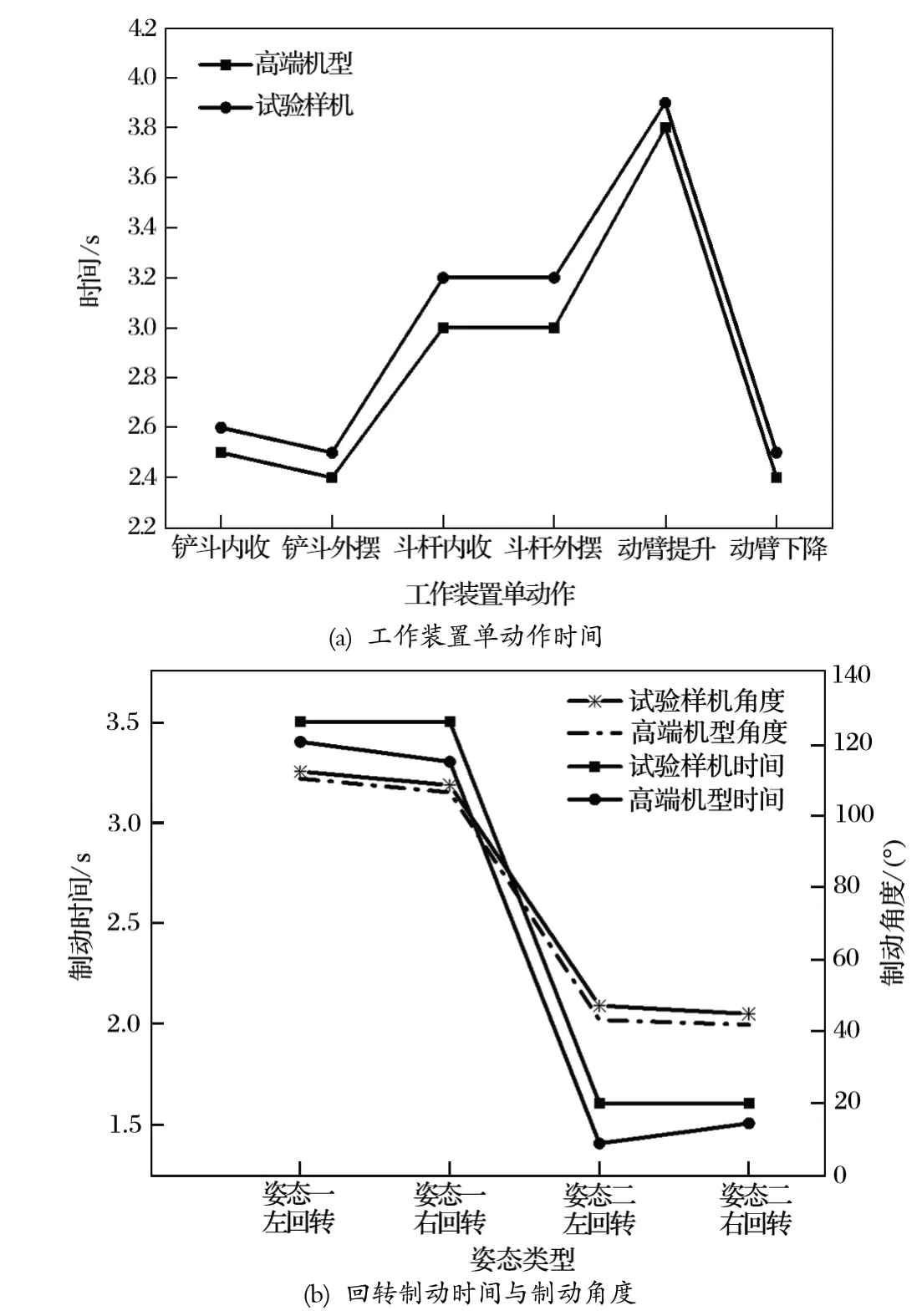
图3 工作装置单动作与回转分析Fig.3 Analysis of single action and rotation of working device
式中:aa为驾驶室悬置主动侧振动加速度有效值,m/s2;ap为驾驶室悬置被动侧振动加速度有效值,m/s2。
通过采集驾驶室 4 个悬置主、被动侧振动加速度信号,并按式 (6) 进行计算,得到各悬置在x、y和z向的隔振率,隔振率越大表示隔振效果越好,通常设计要求悬置的隔振率不低于 20 dB。对比图2(b)、2(c)、2(d) 中驾驶室 3 个方向隔振率曲线可知:y向隔振性能最差,各悬置隔振率均低于 10 dB;x向隔振性能一般,各悬置隔振率在 11~17 dB 之间:z向作为振动能量最主要的传递方向,隔振性能最好,各悬置隔振率均在 21 dB 以上。试验样机振动噪声性能较好,与高端机型差距不大,与模糊评价结果一致。
动臂提升加回转试验考察挖掘过程中动臂的提升能力及铲斗离地高度,进而模拟装车效率,侧面反映挖掘力的大小[11]。采用实地挖掘方式,按挖掘、提升、回转和甩方 4 种动态循环姿态,发动机按最高转速进行试验。铲斗、斗杆和动臂单动作较高端机型差距不大,铲斗内收时间仅增加 4.0%,斗杆内收、外摆时间仅增加 6.7%。但试验样机铲斗内收开启有抖动,液压声大,后期加速不明显,内收停止有冲击;铲斗外摆开启有冲击,过程中有两速变化,外摆停止冲击大。斗杆内收开启有冲击,过程中有两速变化,斗杆外摆过程中有突变、抖动;外摆停止有冲击。动臂单动作时间两车相仿,动臂下降停止均无缓冲。复合动作动臂上升加回转时,试验样机回转开启加速慢,动臂上升虽有加速,但液压缸行程百分比较小,重载时高度稍低,动臂提升加回转时间虽增加6.5%,液压缸行程百分比仅减小 3.6,铲斗提升高度百分比仅下降 3.9,且装车高度相当。试验样机与高端机型表现相当,性能较优,且与操作手得分一致,模糊评价方法准确性得以验证[12]。
回转制动试验考察挖掘机回转起动响应性以及制动稳定性,故采用“回转起动—回转停止—反向回转”作为一个作业循环,调整工作装置,斗杆液压缸全收,铲斗液压缸全伸,调节动臂液压缸,使动臂和平台铰轴与铲斗和斗杆铰轴处于同一水平位置,铲斗重载时装填适量石料或者泥土。试验样机回转开启加速不稳,轻微抖动,过程中稍有颠簸感,高端机型同样出现此类问题,两车回转制动时间和制动角度均满足国标。
4 结论
采用模糊数学结合多因素评价方法,对挖掘机整机性能进行综合评价与分析,基于对标确定评价因子,进而评判挖掘机整机性能优劣,得出如下结论:
(1) 试验样机整机性能模糊评价因子为 0.949 9,是较优机型,与高端机型最相近,比中端机型高。试验样机整机操作性优越,兼顾经济性、可靠性。
(2) 搭建试验平台,对评价结果进行试验验证,试验样机振动噪声性能较好;工作装置单动作、回转与高端机型相当,铲斗内收单动作时间增加 4.0%,斗杆内收、外摆时间增加 6.7%。重载时高度稍低,动臂提升加回转时间虽增加 6.5%,液压缸行程百分比仅减小 3.6,铲斗提升高度百分比仅下降 3.9,且装车高度相当。回转开启虽加速不稳,轻微抖动,过程中稍有颠簸感,但高端机型同样出现此类问题,两车回转制动时间和制动角度均满足国标。
(3) 试验样机与高端机型表现相当,整机性能较优,与操作手得分一致,模糊评价方法准确性得以验证。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
汽车实用技术(2022年5期)2022-04-02
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年4期)2020-12-25
科学技术创新(2020年32期)2020-11-05
消费导刊(2020年1期)2020-07-12
金属加工(热加工)(2018年10期)2018-10-26
时代农机(2016年6期)2016-12-01
环境科技(2015年4期)2015-11-08
机械工程师(2015年10期)2015-02-02
