
手扶式韭菜收割机的设计
2024-03-21 10:38宋学锋张锋伟曹晓庆杨泮楼
林业机械与木工设备 2024年1期
张 武, 宋学锋, 张锋伟, 曹晓庆, 杨泮楼, 颉 强
(甘肃农业大学机电工程学院,甘肃 兰州 730070)
韭菜,属百合科多年生草本植物,具有抗寒、耐热、抗虫病等优点,我国作为韭菜的原产国,种植范围极广[1]。据统计,在韭菜整个生产作业过程中,收获作业量占整个作业量的50%左右,韭菜生长速度快且对季节的感知比较明显,易受自然条件的影响,依靠人工收获效率低、劳动强度大且耗费时间长,无法满足当下韭菜大规模种植的需求[2]。近些年随着国家政策对农业机械的大力发展和蔬菜种植面积的不断扩大,用机械化收获来替代人工收获是必然趋势,机械化收获不仅可以提高作业效率,还能够降低生产成本。国外对于叶菜类蔬菜的收获技术研究较早,意大利HORTECH公司推出了多种SLIDE型号的叶菜收获机械,可以满足对菠菜等多种叶菜的割茬收获以及带根收获等多种收获形式,市场占有量大[3]。荷兰ORTOMEC公司生产的7000型蔬菜收割机,该机使用履带作为行走装置,且收割宽度可调,专门用于收割叶菜类蔬菜[4]。韩国播蓝特公司生产的MT系列叶菜收获机,叶菜被割刀切除后利用输送带和叶菜的摩擦力及叶菜之间的推挤作用,被推送至输送带上完成输送[5]。我国虽然是蔬菜生产大国,但叶菜类蔬菜机械化收获研究起步较晚,近些年才受到关注。上海康博有限公司研制的4G-200型韭菜收割机,适合在小地块面积工作,可实现单行韭菜的机械化收获[6]。济宁雨成机械设备有限公司生产的直流电动韭菜收割机,采用浮动式切割装置,扶正装置为正三角扶正装置,输送带尾部设计塑料可拆卸式集菜箱[7]。南京农业机械化研究所研制的 4GCY-1200 型手扶式叶菜收获机,利用柔性输送导向机构实现茎叶类蔬菜的侧向有序堆放,使叶菜收集整齐不乱[8-9]。
目前市面上专门用于收割韭菜的机械少之又少,北方大多数地区仍采用传统的人工收获方式,机械化程度极低。一方面我国北方韭菜种植主要以小农户种植模式为主;由于缺少专业知识,存在棚室建造不合格、韭菜种植品种杂乱、行距和株距过于散乱、农艺与农技结合性较差的问题,机械化收获难度系数高。另一方面,北方地区地块面积较小,地形不规整,大型农用机械不易进入田地。因此,韭菜的收获机械需求量大,更需要适应性强的收获机具。
本研究针对以上所述问题,基于国内韭菜生产实际情况,结合农艺要求,设计了一款割茬较低且能输送的中小型韭菜收获机械,可依次实现韭菜扶持、收割及输送等功能。并对其机架和割刀部件进行有限元仿真分析,以保证工作部件的使用寿命和强度,为韭菜收割机的结构设计及优化提供参考。
1 整机结构及工作原理
1.1 整机结构
韭菜收割机主要由扶禾装置、切割装置、输送装置和传动装置等部件组成。整机结构为手扶电动自走式,收获方式为单行,结构如图1所示,其外形尺寸长×宽×高为1 800 mm×550 mm×880 mm。机器传动采用链轮链条传动方式,动力由两块串联的24 V*38 Ah铅酸电池驱动,可保证整机工作3小时以上;机架由40 mm×20 mm和50 mm×20 mm方管焊接而成,部分部件采用板件组合焊接或者螺栓连接而成。

图1 韭菜收割机结构示意图
韭菜收割机的主要技术参数如表1所示。
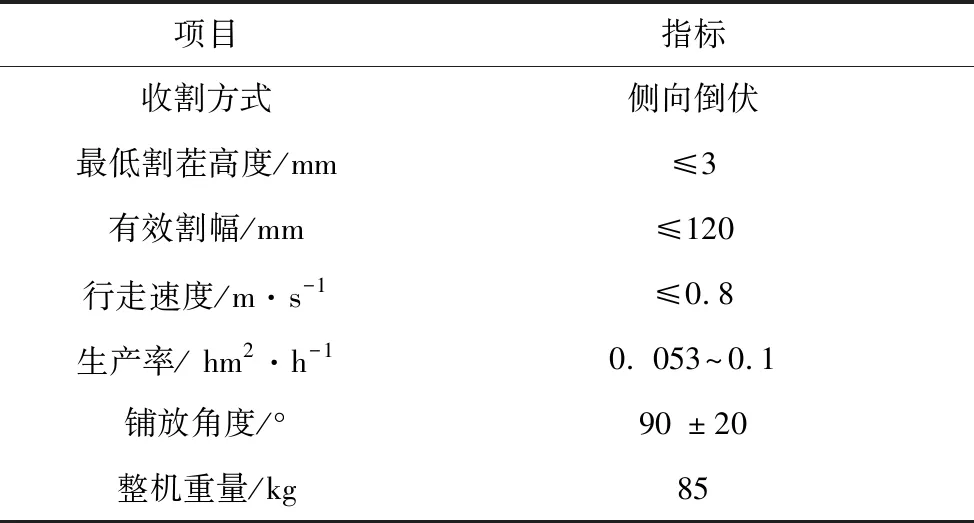
表1 韭菜收割机的主要技术参数
1.2 工作原理
韭菜收割机进行作业时,各电机为其工作部件提供动力,设置合理的前进速度,使机器缓慢前进。分禾器首先将相互缠绕、遮盖的单行韭菜分开后扶起疏直,并对其聚拢导引并喂入到夹持输送装置;在夹持输送带的辅助夹持下,割刀电机驱动割刀快速切割韭菜茎部,切割完成的韭菜由于受到后面植株的推挤,随着夹持输送带向后倾斜向上输送,最后由于惯性有序抛放至地面平铺到机器的侧方;输送过程中韭菜由生长竖直状态翻转为水平状态,再由人工进行打捆,进而完成韭菜的半自动机械化收获。
2 关键部件结构设计
2.1 扶禾装置
扶禾装置主要功能是将倾斜倒伏的韭菜扶正和分离,使其准确的进入柔性夹持输送装置中,降低损伤率[10]。北方韭菜种植中因受到恶劣天气等自然环境的影响,部分韭菜植株会产生弯折、倒伏现象,扶禾装置可以将弯折和倒伏的韭菜植株扶起疏直,从而减少收获漏割的损失;另一方面我国北方韭菜种植行距和株距不规范,韭菜成熟时的叶片相互覆盖缠绕,扶禾装置需要将不同状态下的韭菜植株进行有效分离后再聚拢并引导至夹持输送装置以辅助切割、输送等过程。
韭菜种植模式一般为单垄单行,植株较散乱,扶禾过程中易受损伤,影响韭菜收获质量,所以扶禾装置进行对称设置;每个扶禾器单体分别由支撑板、分禾器和喂入导杆组成,如图2所示。扶禾作业是一个持续前进的过程,随着机具连续作业支撑板贴地收割,侧倾的韭菜植株在分禾器上部圆弧作用下被扶起梳直,并在喂入导杆的导引下进入到夹持输送装置。韭菜种植行距一般为0.22~0.28 m, 因此取两个扶禾器单体间距W=0.3 m。分禾器截面形状为植株所受阻力和机械损伤较小的圆弧状,其前嘴宽度为10 mm, 后端宽度为150 mm,由前嘴到后端呈逐渐变宽的趋势[11];由于韭菜生长状况不同,植株高度存在差异,为防止韭菜植株漏扶,同时防止过高的茎叶侧倾,无法顺利进入扶禾装置,确定喂入导杆与地面倾角为30°,最大离地高度为160 mm。

图2 扶禾装置结构图
2.2 切割装置
在农业收获机械中,茎秆类作物常用的切割器可分为往复式切割器和圆盘式切割器。往复式切割器利用动刀片与定刀片相对运动产生的剪切作用对作物进行切割,适合宽幅收获,缺点是传动结构较复杂,切割惯性力以及振动较大,会出现作物割茬不齐的现象[12]。圆盘式切割器一般速度较高,适合高速作业,工作振动较小,且对硬度小且含水量高的细茎杆作物收获具有较好的适应性,但割刀寿命较短,回转半径小,不适合作物宽幅收获[13]。本文所设计收获机为单行收获,结构空间布置紧凑,且韭菜在夹持辅助下完成切割,因此选用圆盘式切割器。
切割装置整体结构如图3所示,由切割电机、割刀轴、割刀轴管和割刀等组成。切割装置通过切割调节板固定在机架右侧前端,割刀转速通过控制系统由电机单独进行控制,割刀固定螺栓采用左螺纹(又称反牙螺栓)。割刀可根据地面地形情况和韭菜收割要求,通过调节割刀调节板与机架的相对位置来调节韭菜收割的割茬高度。
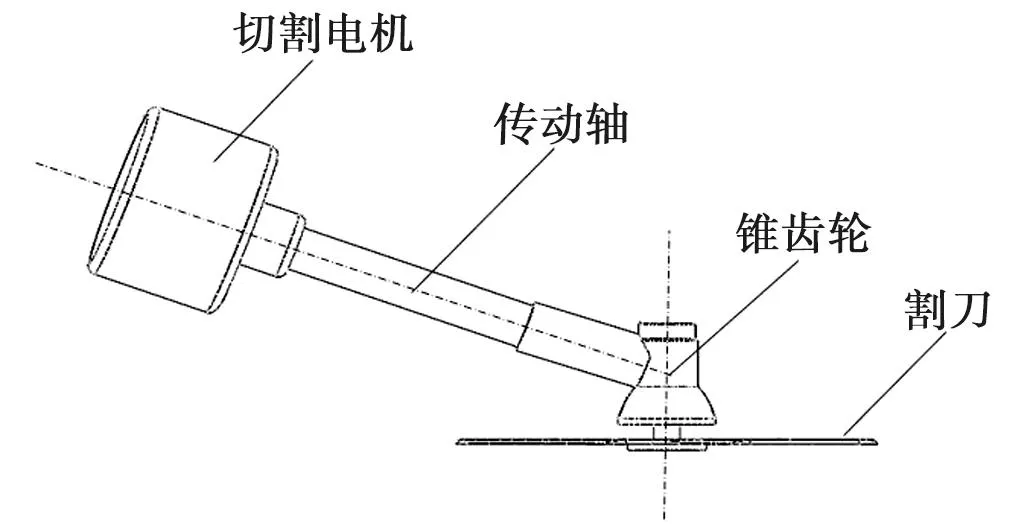
图3 切割装置示意图
切割器的刀盘为一体式圆盘刀, 每个齿的侧切削刃在割刀旋转过程中完成对韭菜植株的切割,其机构如图4所示。由于韭菜收获为留茬收获且含水率较高,割刀材质选择65Mn钢[14-15]。综合割刀材质以及切割条件,割刀厚度为2 mm,割刀刃口角为15°。割刀工作过程中,其回转轮廓既要覆盖单行韭菜幅宽,同时又避免伤害邻行韭菜。通过测量,单行韭菜植株幅宽为15~20 mm,相邻韭菜间距为40~45 mm之间。综合考虑确定割刀基圆直径d为150 mm,割刀最大回转直径D为280 mm,其内孔直径为25 mm。

图4 六星齿圆盘刀
在相邻齿间切削间隔时间,机器的前进距离小于星齿的有效切削长度才能保证韭菜不漏割,所以保证韭菜不漏割的条件为:
(1)
式中:n为割刀转速,r/min;v为机器前进速度,m/s;N为齿数,个;L为割刀有效切割长度,m。
机具收获过程中,前进速度为v=0.8 m/s、割刀齿数N=6 个、有效切割长度L =0.065 m,计算得出n ≥123 r/min。割刀电机选择24 V 19 A直流电机,最高转速2 750 r/min,最大输出功率350 W,满足设计要求。
2.3 夹持输送装置
夹持输送装置是整个收割机械最重要的部件之一,其结构和工作原理直接影响收割机械的作业质量;用于将切割后的韭菜从机器前端输送到机器侧后方,铺于地面方便后续打捆。该装置由一组主动带辊、两组从动带辊(输送带夹紧轮、夹紧辅助轮)和两条夹持输送带组成[16],如图5所示。夹持输送带由两组互成90°的带辊支撑,输送过程中韭菜由直立状态翻转为水平状态,前端由夹紧轮连接在机架前端固定板,后端由驱动轴与带辊连接在一起。输送过程中带辊带动上下两条夹持输送带按照相反的方向转动,韭菜植株与夹持输送带保持相对静止,随着夹持输送带运转至末端并抛到机器侧方地面,从而实现韭菜的平稳输送。为防止韭菜进入时因植株叶片散乱产生损伤,夹持输送带前端向外打开,夹持输送带的张紧程度应根据韭菜植株的压缩特性由涨紧轮和夹紧辅助轮调节。
夹持输送装置通过上下夹持输送带之间的夹持力进行输送,韭菜植物特性比较脆弱,在输送过程中易受损伤。若输送带的速度过小,易发生堵塞情况;若输送带速度过大,易造成收获的杂乱无序以及较高的损伤率,所以合理的输送带速度会使输送过程较为平顺,保证韭菜收获的质量。为避免韭菜在输送过程中发生堵塞情况以及损伤,输送带的速度应该根据单位时间切割的韭菜植株数量来决定,即:
VmBq1=Vsdq2
(2)
式中:Vm为韭菜收割机的行走速度,Vm= 0.2~0.8 m/s;B为割幅,B=0.28 m;q1为韭菜密度,kg/m3;Vs为输送带的速度,m/s;d为韭菜在输送带的夹持厚度,d≤30 mm;q2为韭菜在输送带上聚集以后的密度,kg/m3。
可以得到韭菜的输送速度:
(3)
γ是叶菜聚集系数,γ=q1/q2,一般取18~33[17-18]。
所以:
(4)
通过计算得出夹持输送带的输送速度Vs≥0.15 m/s。
夹持输送带的结构和材质也会对韭菜夹持输送效果有着很大的影响。若输送带太窄,则韭菜植株被夹持时容易产生应力集中的现象,损伤韭菜并影响收割质量;若输送带太宽,机器工作时的消耗功率增大且增加成本。由于韭菜茎叶部位抗挤压强度小,相对于其他农作物较柔弱,夹持输送带与韭菜接触的表面外层材质要求相对柔软,工作底带材质应具有足够的强度和耐磨性,以确保夹持输送的稳定性和可靠性。综合以上因素,考虑韭菜的物理特性及植株高度,夹持输送带外层材质采用柔软且附着力大的海绵材料,内层使用聚氯乙烯(PVC)作为底带材质;为保证夹持输送装置可以更全面地兼容不同形态的韭菜植株,输送带宽度设为96 mm。夹持输送带工作过程中,PVC导向条与输送带辊筒相互配合转动,保证夹持输送带在传输过程中平稳不脱轨;外层胶带表面覆盖一层柔软度较高的高密度海绵层,能够减少机械损伤,在对韭菜植株施加力的同时受到韭菜植株对其的反作用力,使海绵层形成凹陷有效地增大摩擦力,进一步保证韭菜植株在夹持输送过程中不产生滑动、保持稳定输送。
2.4 机械传动装置
机械传动装置主要用于传递动力和实现各个部件的协调运动,由输送电机、驱动轴、张紧装置、轴承及链轮链条等组成,如图6所示。传动装置通过螺栓连接安装在机架后方,通过单独电动机为其提供动力。链轮链条是传动装置的动力来源,可以实现不同部件之间的速度比和转动方向的变换,这种传动方式传动准确度高、传递力矩大、作用在轴上的压力小;小链轮通过链条将动力分配给各个传动部件,从而驱动输送带辊转动。张紧装置由张紧螺杆和张紧轮组成,可调节链条的适当张紧程度,以确保链条在运动过程中的稳定性和紧密性。
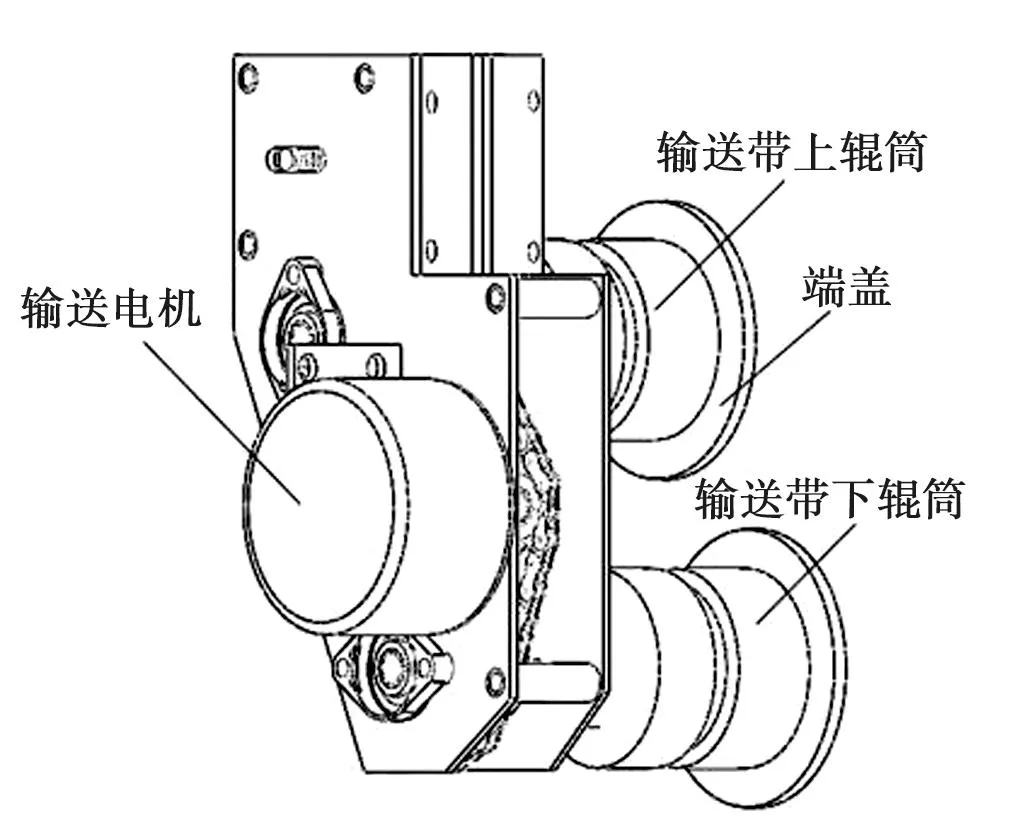
图6 传动装置总成
链轮链条的大体分布如图7所示,链轮链条工作过程中,链轮1为主动链轮,电机工作运转产生动力使链轮1转动,在经过若干级链传动后分别驱动上下夹持输送链轮转动,完成韭菜的输送作业。为保证高效的传动效率,主动链轮的包角不宜过大,需通过张紧装置来左右调节,调节区间为40 mm。链轮1的转速为电机输出端输入收获机的转速,选取主动链轮的齿数为9,上、下输送带所连接链轮的齿数Z2和Z3设定为20;因张紧轮与传动比无关,张紧轮齿数为14,齿根圆直径为50.15 mm。通过计算确定链条链节数为82节、链条节距为12 mm、链长为0.98 m、链条速度为0.3 m/s,并计算出主动链轮齿根圆直径为28.22 mm, 输送带下部连接链轮2的齿根圆直径为70.26 mm。小链轮包角为135°,因链轮2、链轮4齿数相同,所以其参数也相同。输送电机选择24V 18.5A直流电机,最高转速3 000 r/min,最大输出功率350 W。

图7 链条链轮分布图
2.5 控制系统
控制系统主要包括行走装置、切割装置和输送装置的控制、急停和总开关,利用PLC对整机收获作业进行控制,通过直流驱动器并应用PWM脉宽调制分别来调节行走电机(24 V 14 A直流电机,最高转速2 800 r/min,最大输出功率250 W)、输送带辊筒电机和割刀电机,如图8所示,整机各部件密切配合,顺利完成韭菜植株切割输送收获作业[19]。电器盒和控制面板是用于控制和监测韭菜收割机的电气系统和操作的重要部件,可以确保收割机的正常运行和安全性。电器盒内部安装有各种电气元件和设备,如开关、保险丝、继电器等,整机动力通过电器盒分级输送到收割机的各个输出部分,电器盒起到保护电气元件和设备的作用,同时也起到整合和连接电气系统的作用。控制面板可以控制整机总电源开关、行走轮行走速度快慢以及电池电压等。在作业过程中,割刀和传送带保持运行状态,急停开关在特殊情况下可立即将机器断电,保证安全。扶手杆上方设置输送带工作开关和割刀开关,分别控制输送带和割刀的工作状态,方便机器操控、省时省力。

图8 控制系统框架图
3 有限元分析
3.1 机架校核分析
机架结构应保证足够的承重力、耐腐蚀和抗震性能等,对于整机工作发挥着重要作用。机架在工作过程中除了要承担切割装置、输送装置、传动装置等机构的载荷外,还要承受整机自身的重量和工作时在田地间的振动等。机架结构采用方形空心钢管焊接而成,左右两侧由于各部件重量不是均匀分布,造成整个机架朝着前方倾斜,机架前方支撑处焊缝承受应力较大,在工作过程中易发生变形和焊缝开裂,因此在左右两侧加入拉杆和加强筋来增加刚度,保证整机工作性能。从机体结构设计出发,测量各个电机以及安装在机架的各个部件的质量,添加对应的压力将各部分受力以及扭矩分别加载进行分析。利用Solid Works对整机机架进行参数化建模,整机机架材料为Q235结构钢,其许用应力由式(8)可得:
(5)
式中:n为材料安全系数,取n=1.5[20];σs为材料屈服极限,σs=235 MPa;[σ]为材料的许用应力,MPa。
计算得出[σ]=156.67 MPa。机架校核分析如图9所示。通过仿真结果可以看出,机架前方支撑处焊缝由于加入加强筋和拉杆作用变形较小;后横杆由于悬挂传动装置以及装载蓄电池和电器盒等,变形较明显,应尽量减轻电池的重量并注意安装方式以达到机架承重均匀分布和机器稳定工作的要求。整机机架所产生的最大应力为σ=32.5 MPa,最大位移为0.48 mm。通过计算可得,σ<[σ],则整机机架在承受负载作用状态下不会发生断裂和弯曲变形,整机机架载荷应力校核满足设计强度要求。

图9 机架校核分析图
3.2 割刀模态分析
模态分析是一种研究结构振动特性的高效的办法,主要应用在分析机器结构设计是否合理,通过模态分析,可以确定割刀的固有频率、振型和振动模态等信息,从而得出割刀的结构强度和稳定性,以及预测可能出现的共振现象,可以避免共振,为后期的设计及改进提供理论指导。本研究利用SolidWorks构建的割刀三维模型,保存格式为x_t文件,将该模型文件导入到ANSYS中, 根据割刀的材料特性,设定条件,进行模态分析求解,得到割刀工作时的前六阶模态分析图,如图10所示。

图10 割刀模态分析图
根据模态分析的结果,可以得到割刀的振动频率范围为221.55~335.28 Hz,振型主要集中在切割齿的位置。在第4 阶时割刀出现最大振幅171.83 mm,振型主要表现为割刀切割齿刃口扭曲变形。根据机器生产作业时要求割刀转速最高可达到2 000 r/min,其共振频率约为33.33 Hz,通过对割刀的模态分析得知,割刀的最小频率为221.55 Hz,所以割刀在工作过程中不会发生共振以及局部提前破坏的现象,满足割刀在工作时的安全性和稳定性要求[21]。
4 结束语
(1)近些年反季节韭菜种植得到较高的效益,韭菜种植面积不断扩大,依靠人工收获劳动强度大,耗费时间长且用工成本高。本文基于北方韭菜种植模式,参考目前市场上已有的收割机械,研发了一款适用于小地块以及大棚小面积的韭菜收割机械,对于减轻中小型种植农户的收获劳动强度和提高生产效率具有重要意义。
(2)应用有限元分析软件ANSYS Workbench对机架和割刀结构进行有限元分析。结果表明,机架结构在承受相应载荷时满足其工作过程中的强度要求;割刀在工作过程中不会发生共振现象,满足稳定性要求。有限元分析结果可为今后为韭菜收割机结构设计和优化提供参考理论依据。
猜你喜欢
中国石油石化(2021年8期)2021-03-30
今日农业(2019年11期)2019-08-15
汽车零部件(2018年11期)2018-12-08
制造技术与机床(2017年11期)2017-12-18
创新作文(3-4年级)(2016年5期)2017-05-16
新农业(2016年19期)2016-08-16
设备管理与维修(2016年7期)2016-04-23
设备管理与维修(2016年5期)2016-03-16
现代制造技术与装备(2015年4期)2015-12-23
橡胶工业(2015年10期)2015-08-01
