旋翼环境下基于载波差分定位方法的着舰引导应用研究
2024-03-19 05:17黄黎平
电子制作 2024年5期
黄黎平
(中国直升机设计研究所,江西景德镇,333000)
基于卫星载波相位差分定位方法的直升机着舰引导作为卫星导航应用场景之一,需全方位关注导航定位的精度、可靠性、连续性和完好性[1],目的是引导舰载直升机安全可靠的归航和着舰等飞行作业。卫星载波相位差分定位具有精度高和实时性强等优势,但也存在易受环境影响比如遮挡和电磁干扰等的弱点。较之卫星其他应用场景,直升机旋翼环境对卫星信号存在周期性遮挡,直接影响到卫星信号的可用性和连续性,因此研究旋翼环境下卫星信号处理技术和载波相位差分定位方法是做好基于卫星载波相位差分定位着舰引导的关键所在。
本文研究直升机旋翼环境下卫星信号处理和载波相位差分定位技术,立足于直升机的卫星导航定位应用。对直升机旋翼进行建模,研究旋翼对卫星信号的影响,为信号跟踪设计和定位方法设计提供基础;研究卫星信号跟踪质量检测技术,为定位提供更加可靠的观测量;研究RTK 模糊度固定率影响因素,设计旋翼环境下适应性更强的RTK 定位方法。应用本文研究内容的工程产品,为直升机在起飞、在航飞行和着舰等提供准确RTK 高精度位置,支撑顺利安全执行各项飞行任务。
1 着舰引导介绍
舰-机高精度相对定位应用模式如图1 所示,舰载卫星导航差分站通过安装于舰面的卫导天线接收卫星信号,进行载波相位测量并播发载波相位差分服务,同时利用舰上原有的惯导系统的信息,完成位置、姿态解算及预测、飞行航迹的坐标转换等,为舰-机高精度相对定位,无人机着舰提供保障。
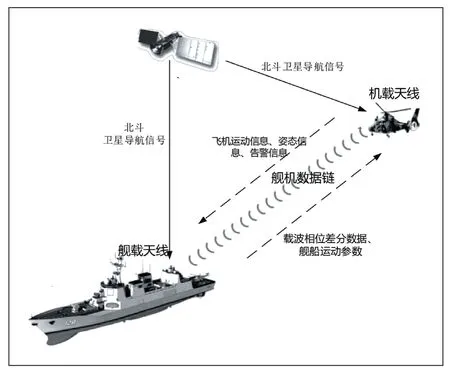
图1 舰-机高精度相对定位应用示意图
数据链系统完成舰船向飞机的载波相位差分信息播发、舰船运动信息和姿态的播发,接收飞机返回的运动信息和姿态信息,播发告警信息。
装备于直升机上的卫星导航设备通过机载数据链完成卫导的差分服务数据的接收,完成动态差分解算,与机载的惯导完成融合解算功能,再通过数据链将运动信息回传给舰载系统。
本文研究旋翼环境下基于载波差分定位方法的着舰引导应用,如图2 所示,从高可靠性、高可用性、高更新率和高精度等维度进行,为实现工程应用效果,从以下几个技术点来实现:(1)旋翼对卫星信号影响分析;(2)卫星信号跟踪质量检测;(3)RTK 模糊度固定率影响分析;(4)旋翼环境下RTK 解算。

图2 本文技术点说明示意图
2 旋翼对卫星信号影响分析
图3 为螺旋桨叶和卫星天线相对位置的示意图。其中,天线半径为r,天线中轴与桨叶旋转轴的距离为d。假设直升机有N 片桨叶,桨叶匀速旋转且角速度为sω,桨叶与天线的高度差为h。对于天线而言,桨叶的复现周期为:
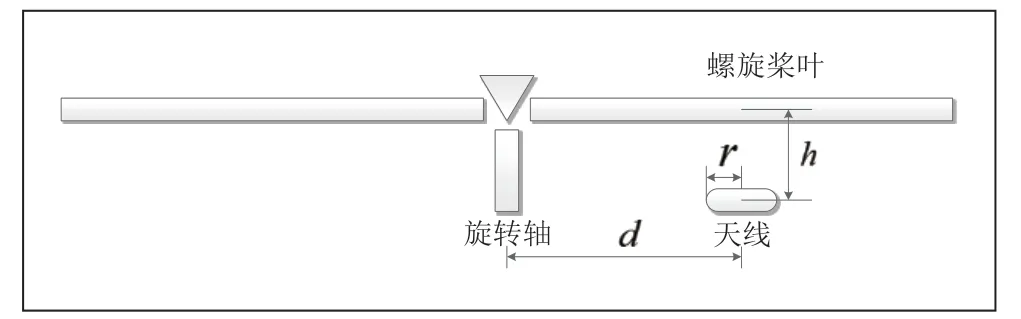
图3 螺旋桨叶与卫星天线的相对位置
螺旋桨叶对信号的影响可简化为占空比来进行分析。桨叶对天线遮挡占空比的最终结果[2]:
θ为桨叶旋转平面与投影平面的夹角,可以看出占空比跟卫星的高度角和相对方位角有关。
(1) 在同一方位角下,仰角越大的卫星信号受遮挡的占空比越小,即受遮挡程度越小;
(2) 在同一仰角下,与参考方向方位角差为0°(卫星方位角与参考方向一致)的卫星信号受遮挡的占空比最小,方位角差为180°(卫星方位角与参考方向反向)的卫星信号受遮挡的占空比最大。
对旋翼遮挡影响进行建模,图4 中深蓝色圆圈内部分为旋翼对天线的影响部分。
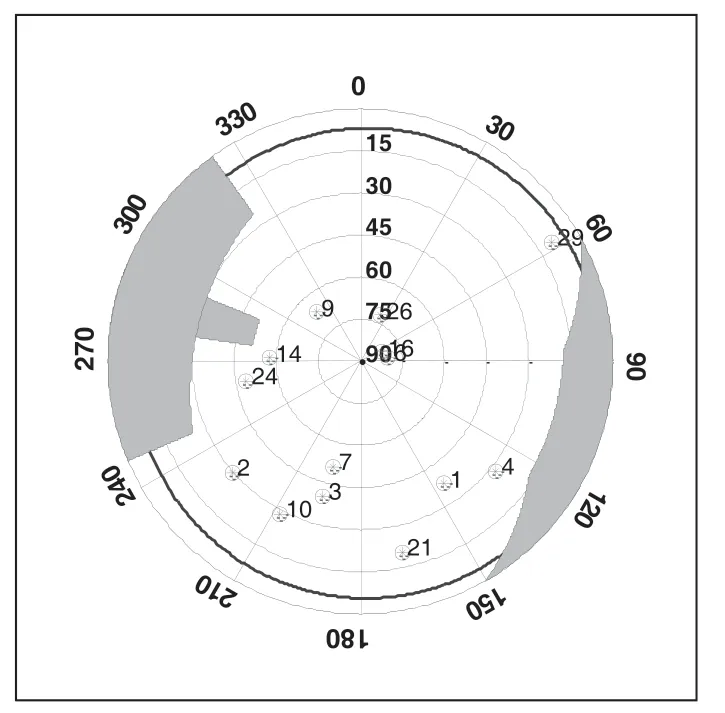
图4 螺旋桨叶对天线影响示意图
实际测试时旋翼对天线影响如图5、图6 所示,其中粉色部分表示四片螺旋桨叶对天线的遮挡情况。
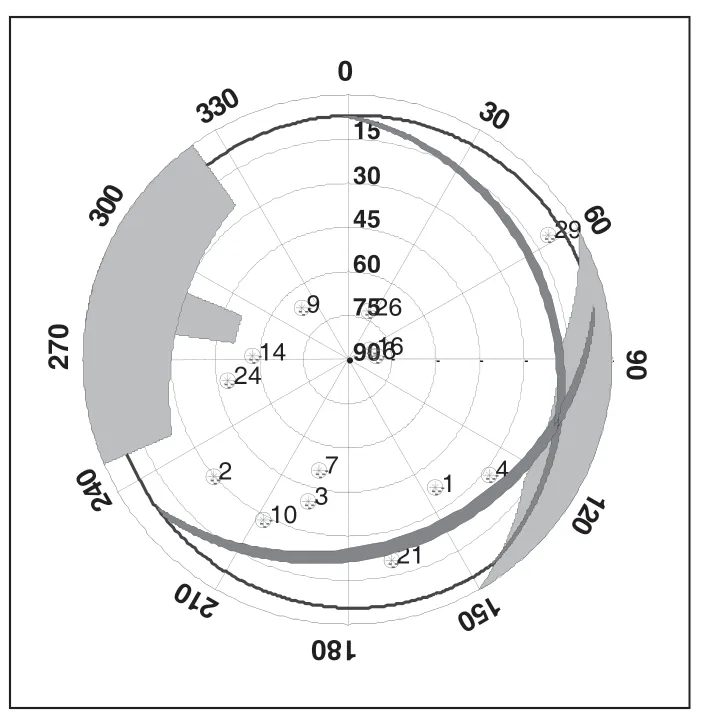
图5 时刻1 螺旋桨叶转动对天线影响示意图
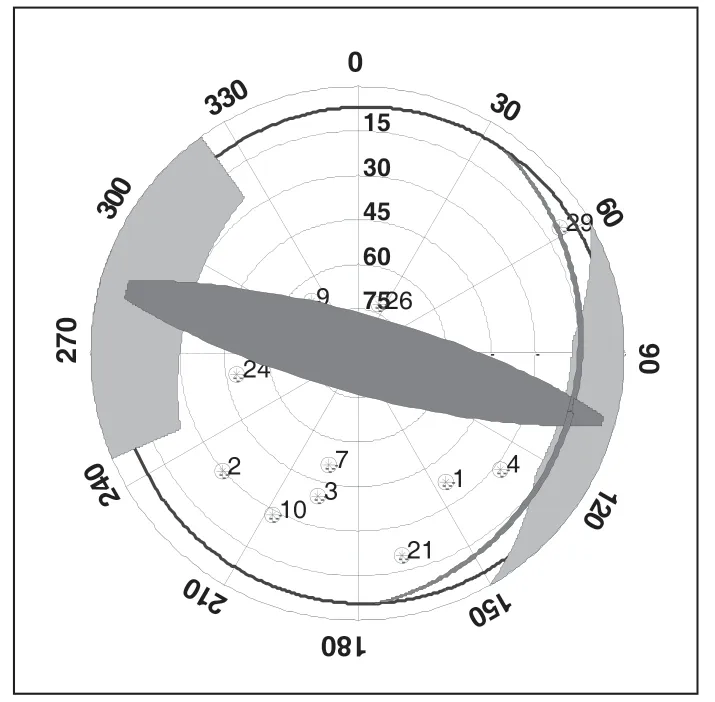
图6 时刻2 螺旋桨叶转动对天线影响示意图
占空比表征的是旋翼对信号遮挡的比例,也即意味着信号能量损失的大小。遮挡占空比越大,信号损失越大,信号平均功率越小;反之,遮挡占空比越小,信号损失越小,信号平均功率越大。
3 卫星信号跟踪质量检测
在环路设计中采用IP 和QP 值比较法进行环路质量检测,实现流程如图7 所示。
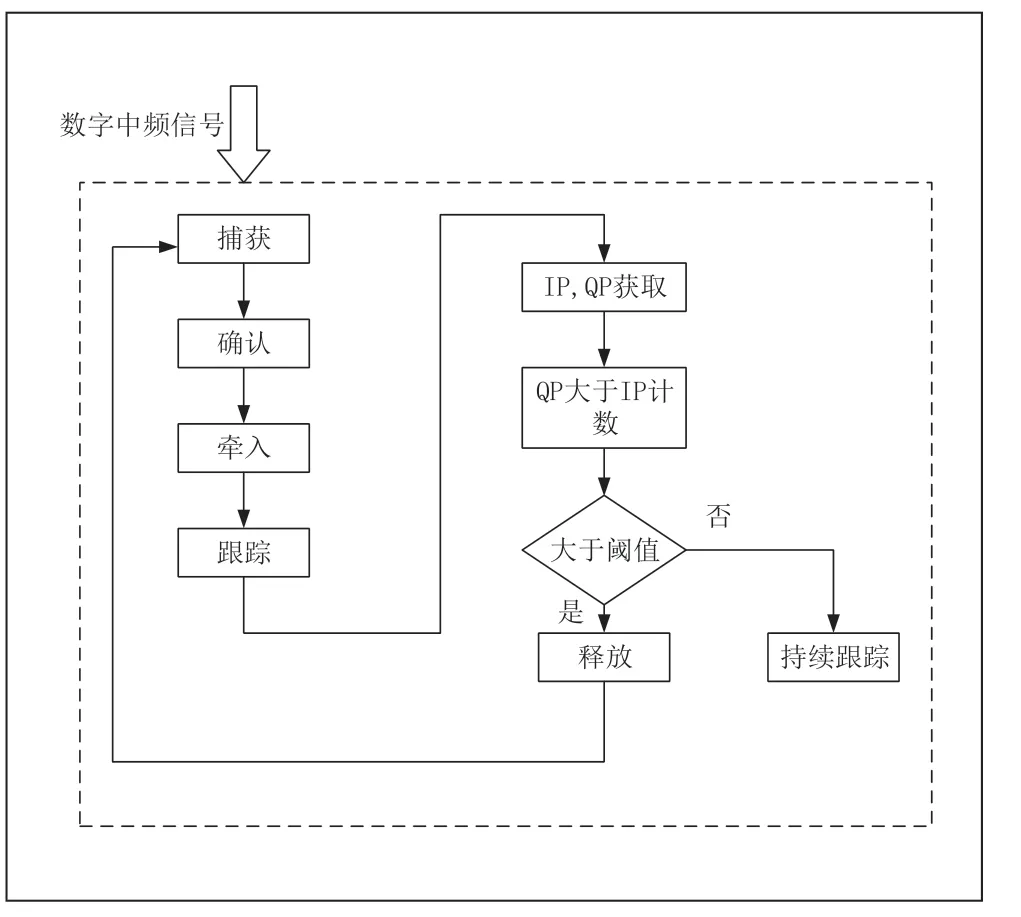
图7 环路质量检测实现流程图
在卫星接收机中,为适应动态场景应用需求,通道部分采用三阶COSTAS 环组成的PLL 环路结合二阶DLL 环路进行卫星信号的跟踪处理,以便在嘈杂的环境噪声中提取我们所需要的卫星信号,如图8 所示。

图8 I/Q 解调法
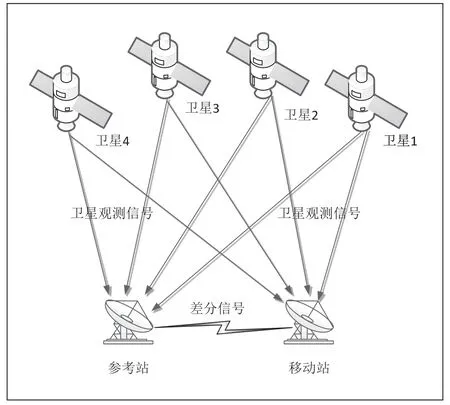
图9 RTK 应用场景示意图
对于输入信号,定义其输入信噪比为[3](其中sP为信号功率,nP为噪声功率):
假定输入信号为白噪声,根据锁相环相关理论,输出信噪比为:
输出信号的相位抖动均方值为:
在直升机启动旋翼的过程中,接收机逐步处于近似周期性的旋翼遮挡场景,此时输入信号存在近似周期性的信噪比变化,信噪比的变动引起的输入信号的相位抖动也体现在环路输出信号的相位抖动中,从而引起相关器I/Q 支路能量比例出现失衡,从而出现QP 大于IP 的情况。
4 RTK 模糊度固定率影响分析
差分定位的基本思想是利用相距不远(一般指15km以内)两个观测站之间的空间相关性,通过对两个测站进行差分数据处理可以消除或减弱相关误差,从而得到比单点定位更高的定位精度。按用户处理数据的时间不同,差分技术可分为:实时差分和事后差分;按观测值的类型不同可分为:伪距差分和载波差分;按解算方式不同可分为:坐标差分和距离差分。载波相位的差分模型又分为单差模型、双差模型和三差模型。其中精密相对定位采用载波相位的双差模型,结合精确的误差修正方法,载波相对定位的精度能够达到毫米级至厘米级,该方法广泛应用于大地动力学、大地控制网的建立等。
模糊度固定成功率其表达式为[4]:
其中,n 表示模糊度数量(卫星数量),σi|I表示第i 次搜索时模糊度误差方差的均方根, Φ (x)为累计分布函数,可表示为:
且满足:
由公式(6)可知,模糊度固定成功率由卫星数目n 和σi|I共同决定。
5 旋翼环境下RTK 解算实现
为实现旋翼下基于RTK[5]技术的着舰引导应用,采用如下技术。
(1)PDOT 观测量推算
PDOT 技术利用前后历元载波观测值差异快速得到相邻时刻移动站位置的增量,然后根据上个时刻的移动站绝对位置即可确定当前时刻的绝对位置,从而克服基准站观测数据传播时延的影响,实现RTK 低时延能力。
(2)惯导辅助周跳探测
飞机着陆环境较为复杂,载波测量值难免受到多径等影响,造成载波周跳,若该周跳不能被及时检出,会造成相对差分结果异常。利用捷联惯导系统提供的惯导信息进行辅助,压缩整周模糊度搜索空间,实现模糊度的快速逼近和求解,并可简单有效地检测出发生小到一周的周跳,实现RTK 高更新率和高可用性。
(3)多历元模糊度解算
利用之前历元信息作为估计量不断修正观测量,获取更高精度模糊度浮点解,从而有效提升模糊度成功率,实现RTK 高可用性。
(4)宽窄巷组合
宽巷模糊度解算方程维数相对于原始单频模糊度降低一半,使模糊度具备高更新率,实现 RTK 快速解算能力。窄巷具有观测误差较小优势,两者结合可实现RTK 高可靠性。
结合上述RTK 主要技术方法,高动态环境下的RTK 技术实现框图如图10 所示。
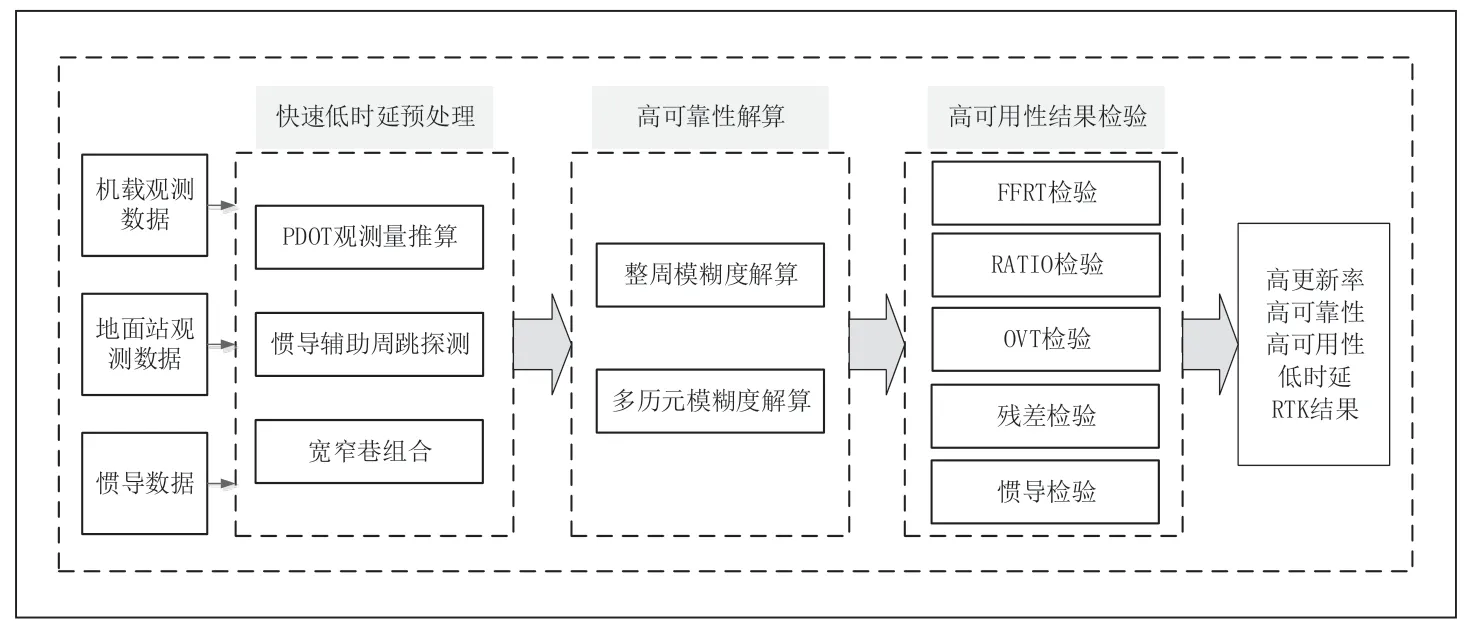
图10 技术设计框图
6 试验分析
为验证旋翼环境下基于卫星载波差分定位方法的效果,在实船上进行了试验,试验场景如图11 所示。
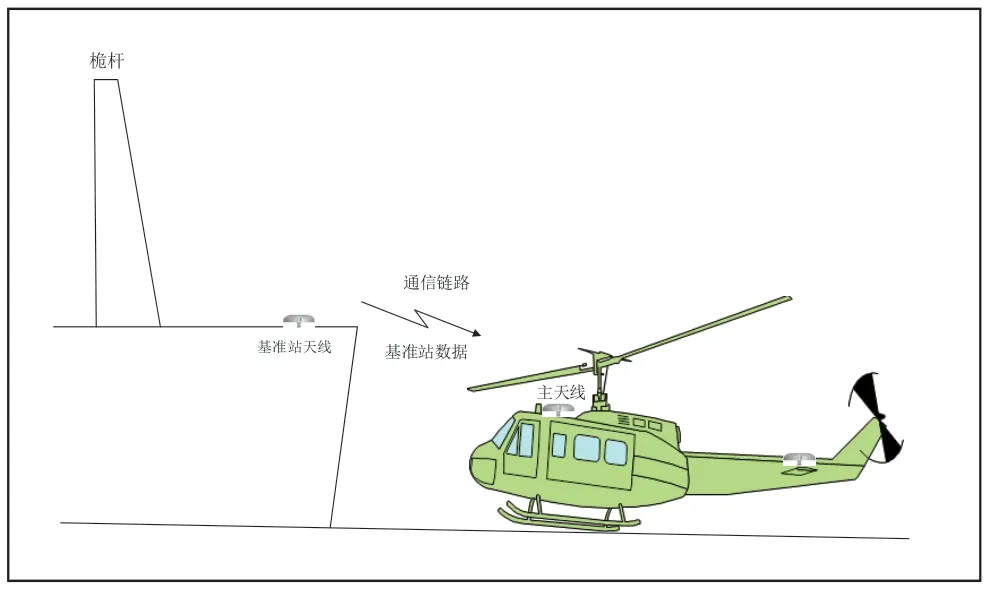
图11 船载直升机试飞试验场景图
试验分析分别对旋翼遮挡占空比、旋翼对环路IPQP 值影响,以及RTK 固定情况进行分析。图12 为测试时段卫星分布情况、表1 为不同高度角区间有效卫星数量。
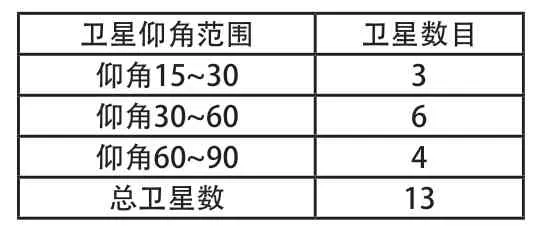
表1 不同高度角区间有效卫星数量

图12 试验时段卫星分布情况
6.1 旋翼遮挡占空比分析
针对实际收星分析旋翼对天线遮挡的占空比,根据公式(2),卫星的遮挡占空比如表2 所示。

表2 旋翼对卫星影响的占空比汇总
6.2 信号能量细化分析
使用实际采集的射频信号进行后处理分析,分析旋翼下CNR 变化和IPQP 变化,具体包括静态和旋翼开车阶段。以PRN24 为例进行说明。
图13 包含了旋翼三个阶段的卫星PRN24 的信号强度,分别是旋翼静止阶段、旋翼快速阶段和旋翼慢速阶段。从图中可以看出在旋翼静止和旋翼快速阶段卫星信号稳定,而旋翼慢速阶段卫星信号出现剧烈抖动的情况。
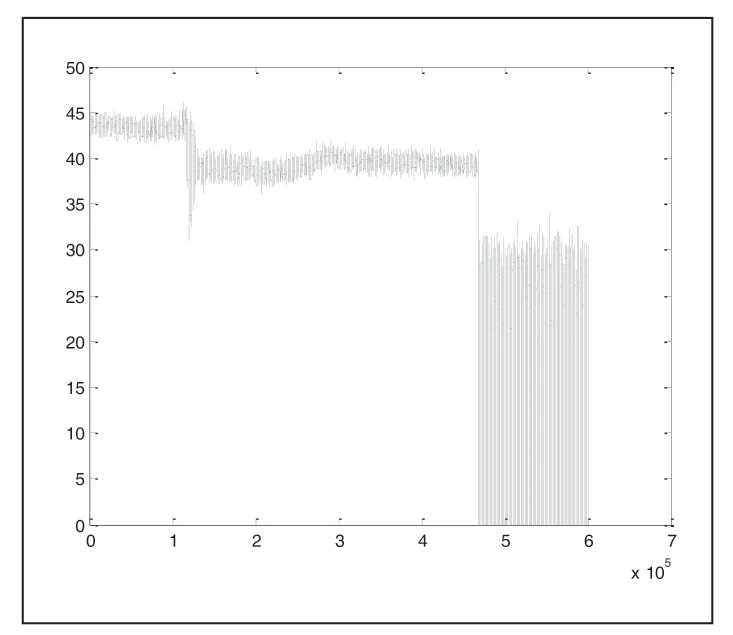
图13 旋翼环境下信号CNR 序列图
图14 展示了旋翼三个阶段的卫星PRN24 的IP 和QP的序列图,其中蓝色为IP 值,红色为QP 值。分别包含了旋翼静止阶段、旋翼快速阶段和旋翼慢速阶段。从图中可以看出在旋翼快速阶段QP 值明显增大;而旋翼慢速阶段卫星信号QP 比IP 值明显增大,甚至信号不可用。
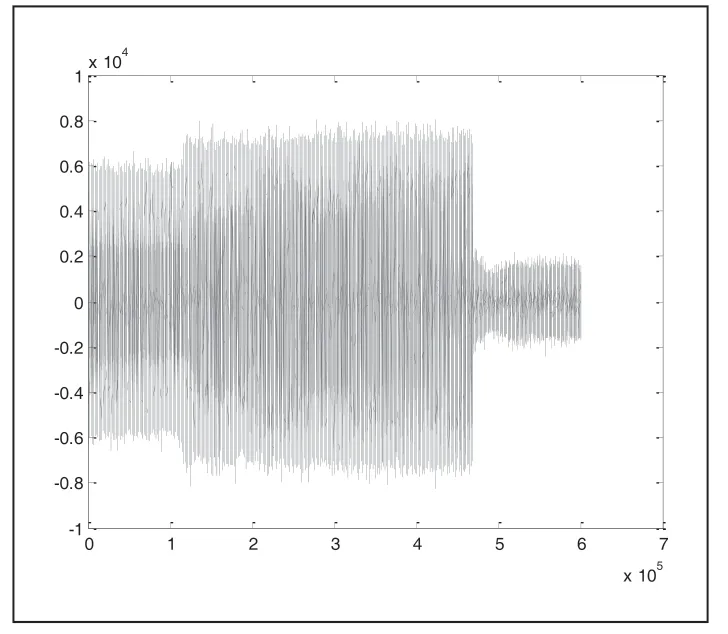
图14 旋翼下IP 和QP 序列图
6.3 着舰引导RTK 定位分析
分析实船实验结果如下:表3 展示了RTK 定位的固定率情况、表4 为RTK 定位精度,可以看出实验结果良好。

表3 RTK定位情况分析

表4 RTK精度对比结果
7 结论
旋翼环境对卫星导航定位应用存在复杂的影响,具体表现为旋翼动态情况下对卫星信号存在周期性遮挡,对于卫星信号造成能量损失,可明确的是卫星信号的接收强度有明显的降低,从IPQP 比值法分析可看出信号跟踪质量明显降低。为实现旋翼环境下基于卫星载波相位差分定位在着舰引导的可靠应用,旋翼环境下卫星信号处理技术,为定位解算提供可靠的卫星观测量是卫星着舰引导的先决条件;载波相位差分定位技术,为着舰引导提供高精度位置信息,是卫星着舰引导的关键一环。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
新世纪智能(数学备考)(2021年5期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年8期)2016-11-16
西部广播电视(2015年10期)2016-01-18
信息安全研究(2015年3期)2015-02-28
太空探索(2014年1期)2014-07-10
电测与仪表(2014年15期)2014-04-04
四川生理科学杂志(2014年2期)2014-02-28