雾天环境下城市快速路的最优建议限速值
2024-03-17 17:58王晓凤
交通科技与管理 2024年2期
摘要 在良好天气和不良天气下的城市快速路上车辆行驶速度是不一样的,良好天氣和不良天气下的车辆行驶状况也是不同的。文章选取不良天气下的雾天进行研究,基于雾天的速度特性、能见度与摩擦系数对车辆运行的影响以及车辆的跟驰特性分析,对非线性跟驰模型进行改进。利用改进的跟驰模型模拟雾天天气下减速过程,求得雾天环境下城市快速路主线道路的最优建议限速值。
关键词 雾天;限速值;安全
中图分类号 U491文献标识码 A文章编号 2096-8949(2024)02-0028-03
0 引言
在不良天气下,由于天气的原因,不论是导致能见度降低还是路面湿滑,都会产生很多潜在的危险性,比晴天存在的危险性更高,所以在研究不良天气下限速问题时应该考虑很多因素。由于能见度或者路面湿滑等因素可能导致驾驶员放慢行车速度,在与平时良好天气下流量差不多的情况相比,往往导致拥堵,所以也要考虑拥堵的情况。研究不良天气下的限速问题能够更好解决拥堵问题,产生隐形的经济效益,更好降低雾天的事故率。
1 评价指标
该文选用交通冲突和排队长度这两个指标。
1.1 交通冲突
采用冲突率作为交通安全性的评价指标。交通冲突率R的计算公式为:
R=T/L (1)
式中,R——冲突率(m?1);T——冲突数(次);L——路段长度(m)。
1.2 排队长度
排队长度的长短反映出道路通行能力的大小,所以用排队长度作为车辆运行效率的指标。
2 改进的雾天元胞自动机模型
2.1 雾天车辆换道安全间隙分析
由于雾天天气下很容易产生事故或者拥堵,所以部分车辆会因不满足当前的交通条件进行换道。
换道车与目标车道后车的最小安全距离s1(0)可表示为:
(2)
式中,c0、c1——换道车、目标车道后车;t1——c0与c1车产生影响的时间;tc——车辆变道所需时间,一般为3 s;tr——驾驶人反应时间,在雾天天气下,根据颜冉[1]的研究发现从中雾到浓雾为2.5~8 s;vc1——c1车车速;vc0——c0车车速;lc0——c0车车长;θ——c0车与道路纵向的夹角。
换道车与目标车道前车的最小安全距离可表示为:
(3)
式中,c2——目标车道前车;t2——c0与c1、c2产生影响时间;ωc0——c0车的宽度;vc2——c2车车速;lc2——c2车车长。
2.2 雾天最小安全跟驰间隙分析
前后车的最小安全跟驰距离s0(0)为:
(4)
式中,v0、v1——同一车道后车和前车的速度;sa——最小安全距离,一般为3~5 m;t3——后车减速到前车速度的时间;acc——加速度,根据已有的研究成果[2]可知雾天环境下摩擦系数f取0.4。
2.3 建立模型
行车安全的因素也包括能见度,低能见度这一安全因素非常容易导致交通事故,所以将低能见度Lv这一因素引入元胞自动机模型中参与限速的影响因素是非常重要的,因此对CA模型进行了改进:
(1)加速过程(条件允许时加速到最大车速)。
vn(t+1)=min[vn(t)+1,vmax] (5)
(2)安全防护过程(驾驶员除了要考虑与前车的跟驰距离外还要考虑能见度的影响)。
vn(t+1)=min[vn(t+1),dn,Lv] (6)
(3)随机慢化过程(这个过程模仿的是现实生活中由于路面或者前方发生无法预料的状况而引起的减速慢化过程)。
vn(t+1)=max[vn(t+1)?1,0] (7)
(4)运动过程(以调整后的速度运行)。
sn(t+1)=sn(t)+vn(t+1) (8)
2.4 冲突率和排队长度的统计规则
该文在原有双车道换道规则的基础上,引入了换道、追尾冲突和排队长度的统计规则,即Bn=1?Bn,Δs0
3 仿真方案
气象学上将雾的等级分为5个标准,即水平能见度为1~10 km的称为轻雾,水平能见度低于1 km的称为雾,水平能见度在200~500 m的称为大雾,水平能见度在50~200 m之间的称为浓雾,而不足50 m的称为强浓雾。该文根据吴芳君[3]的研究发现能见度在300 m以上速度几乎不受能见度的影响,而能见度低于50 m时一般选择封锁道路。所以该文主要研究50~300 m之间的能见度。
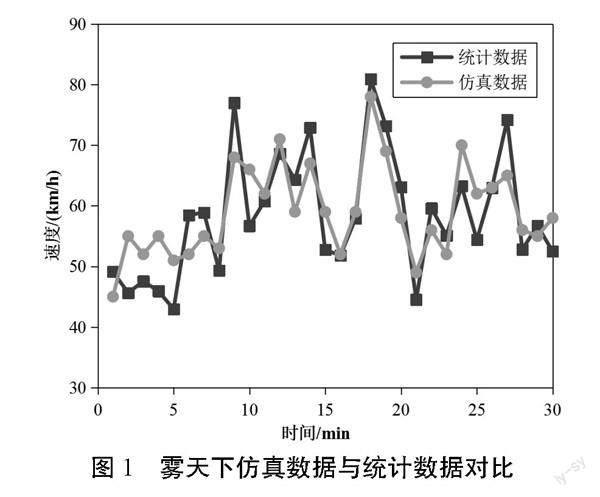
将仿真的数据取30 min,取每分钟的速度平均值,与实测数据(实测数据为轻雾天气下)进行比较,如图1所示。
从图1可以发现,模型能够在误差很小的范围内模拟现实数据,根据R2值计算出置信度在90%以上。
4 雾天限速值确定
首先仿真能见度为50~100 m之间雾天主线的情况。仿真参数取为:平峰时段流量0~1 280 pcu/h,高峰时段流量为1 280~1 750 pcu/h,能见度lv为50~100 m之间的随机值,主线设计速度为80 km/h。初始化时,车辆的速度和位置都是随机的,该文取换道概率为0.25,随机慢化概率为0.3。仿真结果如图2~3所示。
继续采用归一法后最小二乘法求最值,经过量纲为1后再经最小二乘法拟合后,可以得到的平峰时间段能见度为50~100 m雾天天气主线的排队长度与冲突率二者的灵敏度分别为0.009 4和0.014 3,所占的权重为0.40和0.60,还能从图中得到基于效率性的最优值为67 km/h,基于安全性的最优值为28 km/h,计算所得值约为42 km/h,所以可以得到雾天天气下能见度在50~100 m平峰时段的最优限速值为42 km/h。同理高峰时段同天气下主线的排队长度和冲突率二者的灵敏度分别为0.008 8和0.014 7,所占比重分别为0.37和0.63,基于效率性的最优值为
54 km/h,基于安全性的最优值为28 km/h,计算所得值约为40 km/h,所以基于安全性和效率性的最优值为40 km/h。平峰和高峰时段的最优值相差不多,并且根据刘俊德[4]研究提出在不良天气下考虑流量与不考虑流量所得值相差不大,又从限速值一般为5的倍数的角度上考虑,选取能见度为50~100 m雾天天气下的限速建议值为40 km/h。
下面仿真能见度在100~150 m的雾天情况,基本参数与上述同,仿真结果如图4~5所示。
能见度提高后,发现排队长度与冲突率都比之前要降低一些,排队长度最高值低于雾天(能见度在50~100 m)20~30 m,所以能见度还是在很大程度上影响驾驶人员的安全以及车辆行驶的效率。
经过量纲为1后再经最小二乘法拟合后,可以得到平峰时间段能见度为100~150 m雾天天气的主线排队长度与冲突率二者的灵敏度分别为0.008和0.011 1,所占的权重为0.42和0.58,还能从图中得到基于效率性的最优值为73 km/h,基于安全性的最优值为34 km/h,计算结果约为51 km/h,所以可以得到平峰时段的最优限速值为51 km/h。同理高峰时段同能见度雾天气的主线排队长度与冲突率二者的灵敏度分别为0.008和0.008,所占分别为0.5和0.5,基于效率性的最优值为67 km/h,基于安全性的最优值为28 km/h,计算结果为48 km/h,所以基于安全性和效率性的最优值为48 km/h。同能见度50~100 m相同,平峰和高峰时段最佳限速值相差不多,所以取整之后采用建议限速值为50 km/h。
同理,仿真得到能见度为150~200 m的雾天天气下平峰时段下主线基于安全性的最优限速值为40 km/h,基于效率性的最优限速值为80 km/h,排队长度与冲突率二者灵敏度分别为0.007 224 3和0.007 328,所占比重分别为0.5和0.5,计算结果约为61 km/h。高峰时段下主线基于安全性的最优限速值为38 km/h,基于效率性的最优限速值为77 km/h,排队长度与冲突率灵敏度分别为0.006 9和0.006 8,所占比重分别为0.51和0.49,所以计算结果为58 km/h。同上取整所得结果为60 km/h。
综上所述,整理以上内容所得主线建议限速值见表1。
5 结语
该文通过对效率性指标排队长度和安全性指标交通冲突的量化,根据能见度的影响因素改进元胞自动机模型得到不同能见度下主线的最优建议限速值,计算得能见度50~100 m的情况下建议限速值为40 km/h,能见度为100~150 m的情况下最优建议限速值为50 km/h,能见度在150~200 m的情况下最优限速建议值为60 km/h。车辆按照最优建议限速值进行行驶能够使安全性和效率得到很大提高。
参考文献
[1]颜冉. 不利天气条件下道路交通流特征機理研究[D]. 合肥:合肥工业大学, 2016.
[2]裴玉龙. 道路交通安全[M]. 北京:人民交通出版社, 2004.
[3]吴芳君. 不良天气下高速公路限速问题分析[D]. 西安:长安大学, 2012.
[4]刘俊德. 灾害条件下高速公路行车安全管理技术研究[D]. 西安:长安大学, 2013.
收稿日期:2023-11-01
作者简介:王晓凤(1994—),女,硕士研究生,讲师,研究方向:机械及其自动化。
猜你喜欢
阅读(科学探秘)(2021年10期)2021-03-08
成都信息工程大学学报(2018年1期)2018-05-31
小学阅读指南·低年级版(2018年1期)2018-03-14
家教世界·创新阅读(2016年5期)2016-05-14
交通科学与工程(2015年1期)2015-12-23