智能随动太阳能灯塔设计
2024-03-16 10:11毛中华张锦涛王建臣
科学技术创新 2024年6期
黄 琰,毛中华,余 稳,张锦涛,王建臣,*
(1.衢州学院 浙江省空气动力装备技术重点实验室,浙江 衢州;2.浙江尤尼威机械有限公司,浙江 衢州)
在碳达峰、碳中和的目标下,清洁能源的发展对于减少碳排放和环境保护至关重要。为了充分利用清洁可再生能源,光伏发电型移动照明灯塔,采用LED照明灯具[1]。然而,光伏发电型移动照明灯塔也存在一些问题:光伏电池的转换效率较低,受到气候环境的影响发电量较少。若要增加发电量,需要增加太阳能板的数量和质量。为了克服这些问题,可改进光伏电池的技术,提高其转换效率;可使用更高效的太阳能板和优化光伏发电系统的设计以提高发电量;可结合其他清洁能源技术增强灯塔的发电能力。总之,现有移动太阳能灯塔仍需要进一步改进和创新。
智能随动太阳能灯塔提供了一种有效的解决方案。该灯塔通过采用LED 灯具,设计可升降的照明装置、智能随动系统和自动调光系统等功能,以达到安全、节能、省力等目的。智能随动系统根据太阳光的位置和光照强度,自动调整太阳能板的角度和位置,以最大限度地吸收太阳能。自动调光系统根据环境光照条件实时调整LED 灯具的亮度。智能随动太阳能灯塔可实现自动化运行,提供可靠的照明效果,同时节约能源和减少人工操作,符合环保和安全的要求。
1 智能随动太阳能灯塔系统组成
智能随动太阳能灯塔的主要组成:升降系统、智能照明系统、智能随动系统和光伏系统。升降系统用于调节灯塔的高度,可以根据需要将灯塔升高或降低到适合的照明位置。智能调光系统会根据当前的光照强度和环境亮度等条件,自动调整LED 灯具的亮度。智能随动系统主要用于控制光伏系统中太阳能板的运动。光伏系统通过光电与双轴高度角- 方位角跟踪相结合的方法,太阳能板会跟随太阳转动,并实时调整位置,保证太阳光线垂直于板面[2]。
2 机械结构设计
智能随动太阳能灯塔系统的整体机械结构由以下几个部分组成:底盘、升降装置、光伏系统、照明灯部分、控制屏、保护外罩等,智能随动太阳能灯塔三维结构如图1 所示。

图1 灯塔三维结构设计示意
2.1 机械模块设计
光伏系统是智能随动太阳能灯塔的重要组成部分,它由折叠式太阳能板、高度角齿轮、方位角齿轮、太阳能板支撑架、步进电机、转动架、光敏电阻传感器和光线照射角传感器等组件组成,如图2 所示。

图2 光伏系统
折叠式太阳能板是太阳能转换的关键部分,可以根据需要进行折叠和展开,能更好地捕捉太阳能。高度角齿轮由步进电机1 驱动,控制太阳能板支撑架绕着水平轴转动,以跟踪太阳光线强度变化的高度角。方位角齿轮由步进电机2 驱动,控制转动架围绕垂直底座轴进行水平运动,以跟踪太阳光线强度变化的方位角。
折叠式太阳能板装置的设计能够解决灯塔顶部面积有限的问题,提高太阳能的利用率。光伏系统的智能随动功能会根据太阳光线的位置和光照强度,自动调整太阳能板的角度和位置,以最大化太阳能的吸收和转换效率。
灯塔升降系统由伺服油缸、伸缩杆、液压缸、活塞、阀门和控制系统等组件组成,如图3 所示。
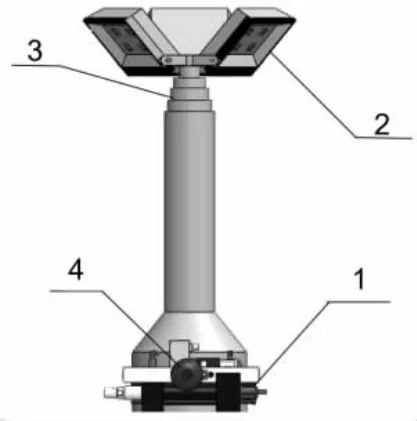
图3 灯塔升降装置
伺服油缸是负责实现灯塔照明装置的升降功能的关键部件。它由液压缸和伸缩杆组成。液压缸包括一个活塞和油缸,液压油通过液压泵从油缸的一侧进入,液压力作用在活塞上,使其产生线性运动。
控制系统通过调节液压泵的流量和压力,以及控制阀门的开关来控制液压油的流动,进而控制伺服油缸的运动。
伸缩杆连接伺服油缸和照明装置,传递伺服油缸的运动力,使照明装置相应地升降,以实现最佳照明效果。液压系统的控制在实现精确升降控制的同时具有稳定性和可靠性,确保灯塔的升降过程平稳和安全。
2.2 太阳能跟踪部分的设计
2.2.1 太阳运行位置的确定
因为地球的自转和公转运动,太阳相对于地球上某一位置是周期性变化的。所以太阳的高度角和方位角在特定的位置和时间可以确定太阳的方向和位置。
2.2.2 跟踪方案选择
太阳能跟踪控制方式是通过特定的设备和系统,跟踪太阳的位置和移动,以最大化提升太阳能的发电效率。有压差式跟踪、视日运动轨迹跟踪控制[3]、光电跟踪。这里我们采用了光电跟踪与双轴高度角- 方位角跟踪方法[4]相结合,在保证全天自动跟踪的同时,避免云、雾、雨、雪等恶劣环境的干扰,并且采用间歇式的跟踪方法[5],在提高发电量的同时减少了能耗。
2.3 理论计算
2.3.1 太阳高度角和方位角的计算
如图4 所示,太阳位于L 点时高度角和方位角的计算[6]。

图4 太阳位于L 点时的天球示意
由余弦公式可得:
上式即任意纬度、任意日期、任意时角角度的太阳高度角及方位角计算公式。
2.3.2 灯塔照明数据
最高离地高度:5.5 m,灯源:灯塔采用4 只LED灯,每个功率为300 W,总功率为1 200 W。光通量为300 000 LM。照射面积:灯塔的照射面积为150~200 m2,照明装置可以覆盖一个较大的区域。照明距离:灯塔的照明距离为25~30 m,可以提供高亮度的照明效果,适用于较远距离的照明需求。灯头旋转角度:灯塔的照明装置能在水平方向上旋转120°,以实现广泛的照明范围。
这些参数将影响灯塔的设计和功能,确保它能够提供高亮度、高效节能的照明效果,覆盖较大的区域,并满足较远距离的照明需求。具体参数如表1 所示。

表1 灯塔照明参数
3 控制系统设计
智能随动太阳能灯塔主要由智能调光系统和智能随动跟踪系统组成。PLC 通过模拟调光方式,输入0~10 V 的模拟直流信号到控制系统。驱动器会根据接收到的信号,调整智能照明系统的光照强度。在灯塔开始运行时,系统会初始化LED 灯的亮度值。然后判断用户是否开启调光功能。如果未开启调光模式,系统将以默认亮度照明。若开启了调光模式,系统会设定灯塔的照射亮度目标值。当传感器检测到光照强度发生变化,系统会读取当前的亮度值,并将其与设定的亮度值进行比较。系统开始调节LED 灯的照明亮度,以逐步接近目标值。如果传感器检测到LED 灯的光照强度没有变化,则无需进行灯光亮度的调整。通过智能调光系统,灯塔可以有效节省能源并提供舒适的照明效果。
智能随动跟踪系统是在不同时间、同一地点使用数学公式计算太阳在天空中的高度角和方位角,以精确控制跟踪设备运动的同时,利用光敏电阻在不同的光照条件下会阻值会发生变化的原理[7],将四个完全相同的传感器放在太阳能板的四边,如图5 所示。

图5 传感器安装
当太阳光线和太阳能板垂直方向形成夹角时,接收到光强多的光敏电阻阻值减小,通过数据采模块将光照强度值转化为0~20 mA 的电流值后汇总各路输入的模拟量,通过Modbus 通信协议发送给PLC 进行程序处理。最后PLC 控制电机,对高度角和方位角进行修正,使得四个光敏电阻的阻值相等,实现太阳光线垂直照射太阳能板,达到最大的发电效率,如图6所示。

图6 智能跟踪流程
4 实验
我们完成了实物模型的试制,并进行功能和追光效率的验证。使用西门子公司的S7-200SMART ST30作为主控制器,实现了对太阳能板的全天候追踪。装置能在2 秒内调整太阳能板的倾角,随动装置的平均电压值为13.25 V,比固定装置的8.39 V 高出了57.9%。实验结果验证了智能且随动系统设计和控制原理的有效性。图7 为研制的实物模型。

图7 智能随动太阳能灯塔实物
5 总结
本文设计的智能随动太阳能灯塔,实现了提高采光率、增加发电量和自适应环境亮度调整,符合当下的社会发展,系统主要有以下几个优点。
(1) 采用折叠式太阳能板,在节约灯塔顶部空间的同时,增加了3 倍的采光面。
(2) 采用光电跟踪与双轴高度角- 方位角跟踪相结合的方法,并选用间歇式跟踪,在能耗低的同时,提高了对太阳的利用效率。
(3) LED 灯结合智能调光系统,可以保证环境光提供的照度与灯塔光提供的照度的和为恒定值。
猜你喜欢
中外文摘(2021年20期)2021-11-03
卷宗(2021年2期)2021-03-09
中国交通信息化(2020年5期)2021-01-14
空间科学学报(2020年4期)2020-04-22
金桥(2020年12期)2020-04-13
文苑(2019年24期)2020-01-06
测控技术(2018年5期)2018-12-09
中国交通信息化(2018年9期)2018-11-09
电子制作(2017年17期)2017-12-18
琴童(2016年12期)2017-01-16