
核电厂汽动辅助给水泵转速调节系统鲁棒性提升研究
2024-03-14 09:08牛茂龙
自动化仪表 2024年1期
牛茂龙
(中广核研究院有限公司,广东 深圳 518028)
0 引言
某核电厂二期工程5#、6#机组采用百万千瓦级压水堆核电技术,具备三代核电主要技术特征。汽动辅助给水泵属于核电厂专设安全设施之一,可在主给水系统任何一个环节发生故障时作为应急方法向蒸汽发生器二次侧供水,以排出堆芯剩余功率,是核安全的重要保障设施[1]。
5#机组热态试验期间,在执行汽动辅助给水泵启动试验过程中,发现其在长时间停运后的再次启动试验中(停泵时间超过6 h,以下简称“冷启动”)极易引起转速波动。转速波动发生后调速系统不能正确响应,严重时会导致超速跳闸。短时间间隔启动试验(停运时间在4 h以内,以下简称“热启动”)汽泵转速调节性能良好。经反馈,进行试验的国产汽动辅助给水泵在国内其他核电基地、某出口核电项目调试期间均发生过类似现象,但并未找到根本原因。该国产汽动辅助给水泵以后还将用于国产三代核电的批量化项目建设。因此,分析研究该国产汽动辅助给水泵转速波动的原因并提出解决方案对核电厂的安全运行非常重要,同时可为类似项目及后续机组提供重要的经验反馈。
1 汽动辅助给水泵转速调节原理
国内大型商业压水堆核电厂核级给水泵一直被英国Clyde公司垄断,其二期工程采用了国产化的汽动辅助给水泵。与Clyde汽动辅助给水泵转速调节系统采用机械液压调速方式相比,国产化后的汽动辅助给水泵转速调节系统主要由电子调速器、气动执行机构、进汽调节阀,以及相应测量传感器组成[2]。这种结构较原机械液压调速系统大大简化。除了气动执行机构较液压执行机构动态性能略差以外,国产化后的汽动辅助给水泵转速调节精度和运行自动化水平均有一定提高[3-4]。汽动辅助给水泵转速调节原理如图1所示。
由图1可知,电子调速器先根据转速测量值和设定值形成转速调整需求,再由气动执行机构实时调整进汽调节阀开度以改变汽动辅助给水泵进汽量,从而实现转速调节。增速器可以加快气动执行机构的响应速度,确保汽泵能够及时响应快速启动指令,并迅速将转速维持在8 000 r/min附近,以满足安全准则要求。
2 汽动辅助给水泵缩水冷启动时频发转速波动
汽动辅助给水泵的启动方式与传统汽泵不同。进汽调节阀在截止阀开启前处于全开状态,即当截止阀开启后汽动辅助给水泵以最大流量进汽。此时,进汽调节阀的主要作用是防止进汽超速,因此对气动执行机构的响应品质有较高要求。
5#机组试验期间,汽动辅助给水泵共执行50余次快速启动过程。其中,7次冷启动时均发生转速波动;热启动时调速系统均表现出良好的调节性能。汽动辅助给水泵冷启动和热启动时转速调节情况如图2所示。
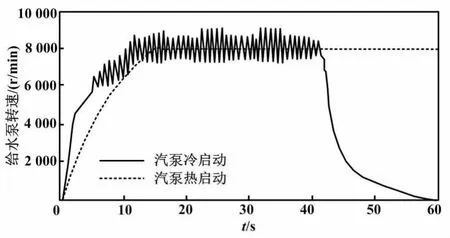
图2 汽动辅助给水泵冷启动和热启动时转速调节情况
汽动辅助给水泵冷态启动时:进汽截止阀打开;进汽调节阀根据预设升速率调节进汽量;汽动辅助给水泵转速逐渐升高,达到或接近8 000 r/min设定点附近时,呈现出调节振荡趋势。调速系统无法消除转速波动现象,只能维持近乎等幅震荡,或继续调节发散直至汽动辅助给水泵超速跳闸。转速波动周期约为0.8~1 s,波动范围约为±400 r/min。
3 汽动辅助给水泵调速系统模型化分析
3.1 电子调速器特性分析
由图1可知,电子调速器和气动执行机构是汽动辅助给水泵调速系统的主要组成部分。电子调速器由转速偏差计算单元和调速比例积分微分(proportional integral differential,PID)控制器组成。通过调整PID参数,可以改变调速系统的静态和动态响应特性。
3.2 电气转换器特性分析
气动执行机构由电气转换器(electrical-pneumatic-converter,EPC)、气动定位器、增速器(又名气动放大器、气动增速器、流量放大器、气动继动器等)、隔膜气室及相关气源管路组成。EPC的作用是将电气调速器输出的4~20 mA电流信号线性转化为20~200 kPa的压力信号,并将该信号作为定位器的输入。
3.3 气动定位器特性分析
气动定位器按照力矩平衡原理工作。当输入气压变化时,定位器输出到执行机构隔膜气室的压力发生变化,推动阀杆移动,并带动反馈杆在一定角度内转动。定位器内部机械部件将反馈杆的转动转化为反馈弹簧的拉力。当反馈弹簧的拉力力矩与输入气压产生的力矩平衡时,定位器达到平衡状态,使气动执行机构的阀位保持一定的开度。从工作原理看,气动定位器可以视为一个具备PID闭环调节功能的物理部件[5-6]。因此,电气调速器输出的4~20 mA电流信号、EPC输出的20~200 kPa气压信号与执行机构的行程反馈信号具有一一对应的线性关系。
3.4 增速器特性分析
增速器主要由阀芯、阀体、上下膜片、调节螺钉等部件组成,是按照力平衡原理工作的纯机械部件。增速器剖面如图3所示。
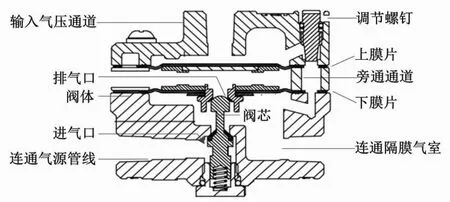
图3 增速器剖面
增速器工作原理简述如下:当来自气动定位器的输入气压信号增大时,上膜片带动阀芯向下移动打开进气口;当来自气动定位器的输入气压信号减小时,下膜片带动阀芯向上移动打开排气口;当进气口或排气口打开时,注入或排出执行机构隔膜气室的压缩空气流量变大,使执行机构的响应加快。增速器上、下膜片的压力平衡时阀芯回位,进气和排气通道关闭,使增速器达到平衡状态[7]。增速器启动时提供给执行机构的压缩空气流量大小用流量系数(CV)表征。一般情况下,CV远大于气动定位器的输出流量。

(1)
式中:ΔP为上下膜片压差;K为与增速器、气动执行机构隔膜面积及弹簧刚度等有关的放大系数;T为与隔膜气室有关的时间常数;s为拉普拉斯算子。
由式(1)可知,上下膜片压差的函数关系为近似实际微分环节[9-10]。
由自动控制理论可知,闭环控制系统中增速器的介入会增加控制回路的增益,从而降低系统稳定性[11]。通过改变调节螺钉的位置以降低增速器的灵敏度,可以及时将增速器退出闭环控制系统,进而降低对闭环控制系统的不利影响。当输入信号的变化过小而不足以推动阀芯,或者输入信号的变化大部分被旁通通道泄压时,增速器仅起到通过旁通通道传递定位器输出气压的作用。因此,从另外一个角度看,调节螺钉提供了增速器的启动阈值调整方法(通过上述分析,启动阈值可与灵敏度等效,本文采用便于量化的启动阈值来表述)。当上下膜片压差的变化率超过启动阈值时,增速器移动阀芯以打开相关方向的通道。当上下膜片压差的变化率低于启动阈值时,增速器阀芯回位[12],以关闭进气、排气通道。
3.5 调速系统近似模型
综上分析,调速系统近似控制模型如图4所示。
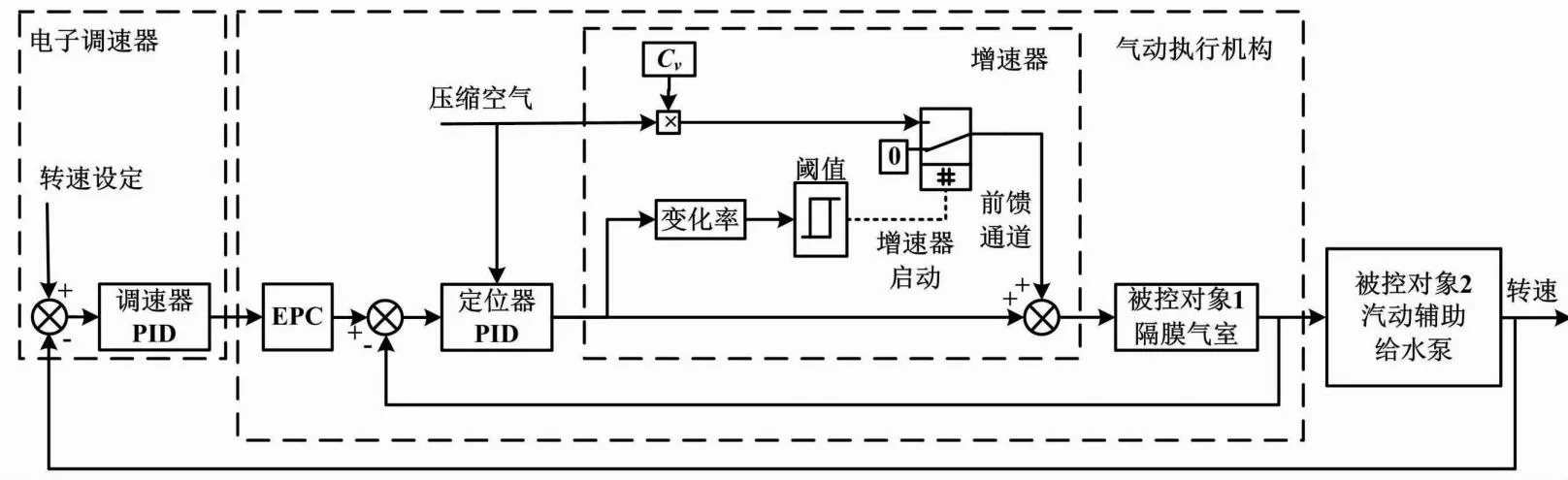
图4 调速系统近似控制模型框图
图4模型按执行机构进气方向绘制。排气方向与之类似。
执行机构隔膜气室为被控对象1,有增速器前馈通道和定位器通道这两个输入,且在增速器内部汇合。其输出为进汽调节阀行程指令。汽动辅助给水泵为被控对象2,以进汽调节阀行程信号(可视为蒸汽流量信号)为输入、汽泵转速为输出[13]。
电子调速器将转速偏差转换成4~20 mA进汽调节阀开度指令,再由EPC线性转换成20~200 kPa气压信号。其与执行机构行程位移所对应的气压信号在定位器内进行PID运算。定位器输出气压调节气动执行机构隔膜气室压力。当隔膜气室压力、EPC输出压力和定位器输出压力相等时,系统达到平衡。
若电子调速器要求快速提升转速,则EPC输出快速增大。增速器在定位器输出气压正向变化率超过启动阈值时启动。压缩空气通过前馈通道直接注入隔膜气室,以达到快速调节进汽调节阀的目的。模型框图中前馈通道由乘法运算进行示意。其表示前馈通道的强弱与增速器的CV正相关,并不具有严格的数学意义[14]。
4 汽动辅助给水泵转速波动分析与处理
4.1 转速波动周期分析
由图4可知,汽动辅助给水泵调速系统可以看作一个串级控制系统。主调节器的被调量为汽动辅助给水泵转速反馈。其调节周期主要取决于被控对象动态特性及主调节器参数。根据经验可知,此类被控对象的调节周期约为6~15 s。副调节器的被调量为阀门行程反馈。该副调节器回路可以等效为一个快速位置随动系统。执行机构全开全关行程时间约为1 s,与调速系统波动周期近似。由以上分析基本可以判定汽泵转速在0.8~1 s的周期性波动主要来自于气动执行机构副调节器回路的振荡。副调节器回路振荡后,经主回路的进一步放大形成共振,从而引发整个调速系统振荡。
4.2 第一阶段处理
第一阶段将引起汽动辅助给水泵转速波动的根本原因定位到气动执行机构增速器启动阈值和调速器PID参数的匹配性上。所采用的调速系统参数调整方案如图5所示。
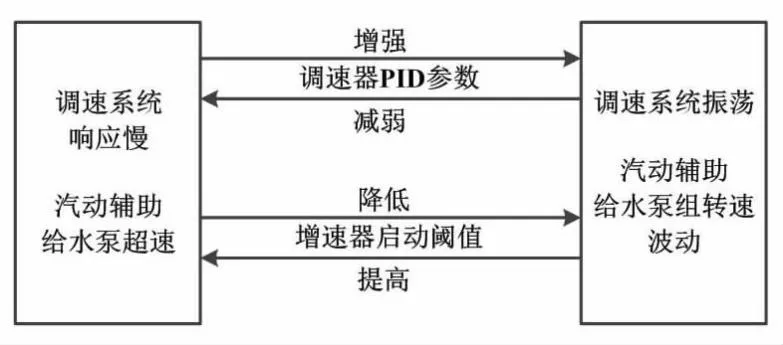
图5 调速系统参数调整方案
由图5可知,当调速系统由于响应慢、无法及时抑制转速的上升而引起汽动辅助给水泵超速时,系统通过增强调速器PID参数和降低增速器启动阈值加快调速系统的响应;当调速系统由于控制增益较大而发生振荡时,系统采取反向操作。但经反复尝试,系统始终无法找到一组匹配的参数,使得调速系统在具有足够鲁棒性能的同时满足冷启动和热启动下的调速需求。
4.3 第二阶段处理
4.3.1 调速曲线的“离散”属性分析
由图2可知,汽动辅助给水泵在冷启动和热启动两种不同工况下调速系统响应存在巨大差异,且不存在中间过渡现象,“离散”属性明显。由图4可知,具备这种“离散”属性的只有增速器这一部件。
4.3.2 进汽调节阀响应分析
原设计中进汽调节阀无位置反馈接入分布式控制系统(distributed control system,DCS)。这客观上加大了问题分析的难度。将进汽阀调节指令和位置反馈接入高速记录仪后,发现冷启动工况汽动辅助给水泵调速系统振荡时,进汽调节阀动作速度显著慢于调节指令动作速度。进汽调节阀由全开行程关到50%左右后关闭速度显著变慢,呈现出接近饱和趋势。调速系统振荡曲线如图6所示。
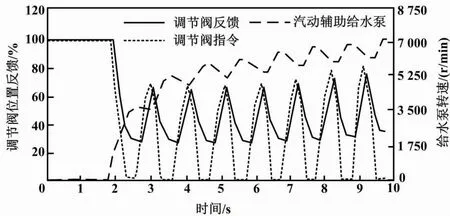
图6 调速系统振荡曲线
由于调节阀动作速度较慢,过快的调速指令无法提高系统的动态响应能力,反而降低了系统的稳定性。
4.3.3 气动执行机构响应特性影响因素
由图4模型可知,若以进汽调节阀的全行程时间t作为衡量气动执行机构的动态响应指标,则t为[15]:
t=f(A,P,V,k,CV,h)
(2)
式中:A为气源压力;P为定位器通流能力;V为执行机构气室容积;k为执行机构弹簧参数;h为增速器启动阈值。由此可见,对于已知气动执行机构,A、P、V、k、CV均为固定值,只能通过改变启动阈值h来调整响应特性。
CV值的大小决定了隔膜气室进、排气时前馈通道的强弱。启动阈值决定了增速器启动的时机。CV值越大,对应增速器体积越大、启动阈值越高。这是由其机械结构决定的。在相同激励条件下,增速器的作用持续时间客观上会缩短。虽然可以通过调节螺钉在一定程度上降低启动阈值,但过低的启动阈值极易引起执行机构自振荡(见图5调整方案)。若能延长增速器作用持续时间且不造成执行机构自振荡,将极大地改善执行机构的响应特性。
4.3.4 不同CV增速器增速效果试验
汽动辅助给水泵进汽调节阀采用气关式隔膜执行机构,隔膜外径为255 mm,气室容积比较小(响应快、滞后小的选型设计)。本文改用相当于当前增速器流量系数20%大小的增速器(流量系数0.2CV)进行全行程试验,并与当前增速器(流量系数CV)进行比较,在相同试验条件下记录不同的增速曲线。调节阀配不同CV增速器阶跃全关试验曲线如图7所示。
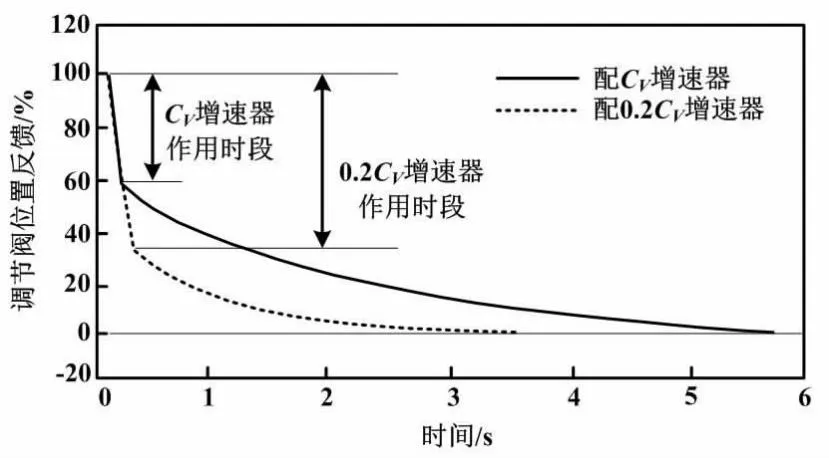
图7 调节阀配不同CV增速器阶跃全关试验
由图7可知,CV增速器只作用了大约40%的行程,而0.2CV增速器作用了超过65%的行程。在增速器作用时段内,不同CV对阀门关闭速率并无显著影响(气动执行机构隔膜有效面积约550 cm2)。但由于0.2CV增速器作用时间较长,阀门从100%关闭到10%左右开度的用时约为1.2 s,而CV增速器的用时约为4 s。
在增速器调节螺钉有效调节范围内,试验以螺钉旋转0.125圈为调节步长。进汽调节阀配不同增速器的动态特性比较试验如表1所示。
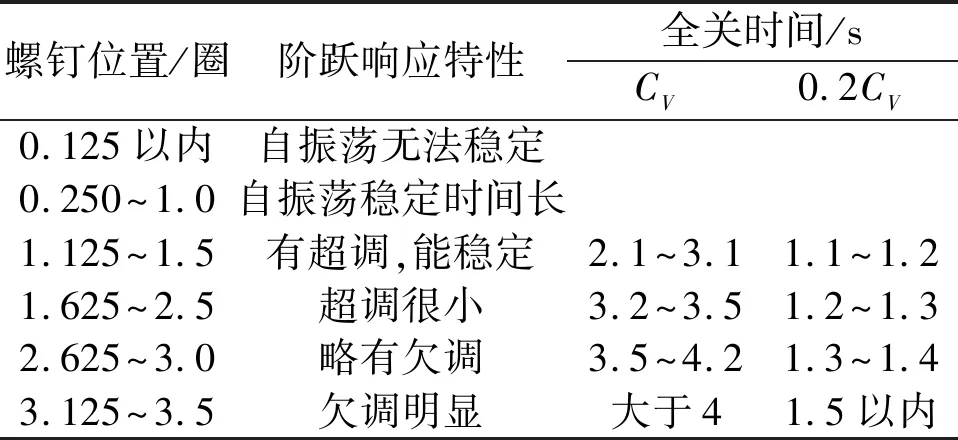
表1 进汽调节阀配不同增速器的动态特性比较试验
表1中,从100%到10%视为全关。
由表1可知,即使增速器流量系数差异很大,只要调节螺钉的位置相同,则执行机构的阶跃响应特性相似(振荡、超调和欠调情况)。但由于增速器作用持续时间不同,在全行程关闭时间上存在巨大差异。对气动执行机构而言,0.2CV增速器的增速效果显著优于CV增速器。
4.3.5 更换增速器后试验验证
现场更换0.2CV增速器后,调速器PID比例由3.0(第一阶段调试结果,为了获取更快的系统响应)改为1.2[16],在热启动和冷启动情况下均能实现汽动辅助给水泵的快速启动和转速调节。更换0.2CV增速器后,汽动辅助给水泵冷启动曲线如图8所示。
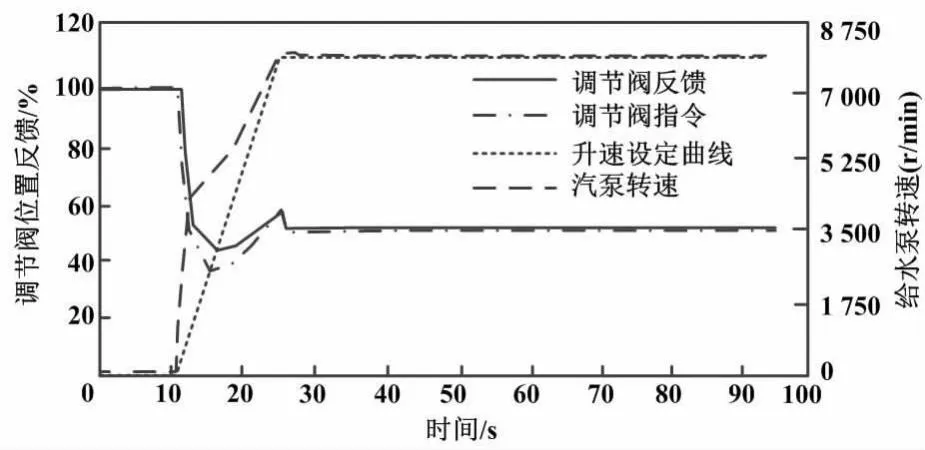
图8 汽动辅助给水泵冷启动曲线
升速率设置为每秒增加500 r,进汽截止阀打开约16 s左右汽动辅助给水泵转速达到8 000 r/min,稍有超调后随即稳定在目标转速附近。由图8可知,虽然开始阶段汽动辅助给水泵实际升速率远高于设定速率,但由于进汽调节阀在调节指令的作用下快速关小,很快抑制住了转速的飞升。随着汽动辅助给水泵在4 000 r/min附近升速趋缓,调节指令并没有像第一阶段那样继续减小到0,而是始终执行正常的转速闭环调节。当转速设定达到目标转速8 000 r/min并保持不变时(相当于带给调节器入口负偏差),调节阀随即关小并逐渐稳定在50%开度附近。
5 结论
汽动辅助给水泵作为核电厂重要的专设安全设施,必须时刻处于热备用状态。调速系统呈现出的技术问题影响因素比较隐蔽。本文在吸收先前处理经验的基础上,深度剖析了增速器对气动执行机构的增速机理[17-18],通过理论分析及试验验证突破了“增速器流量系数越大增速效果一定越好”的传统思维,并系统性取得不同增速器在各种灵敏度下的特性记录。通过更换小流量系数增速器,一方面降低了汽动辅助给水泵调速系统的控制增益,另一方面提高了调速系统的鲁棒性。汽动辅助给水泵调速系统的鲁棒性提升,使其具备消除冷、热启动不同工况复杂扰动的能力。本文研究过程和成果可用于指导与气动执行机构有关的控制系统参数优化、鲁棒性提升等同类问题的处理。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
水泵技术(2021年3期)2021-08-14
减速顶与调速技术(2021年1期)2021-08-14
科技创新导报(2021年33期)2021-04-17
电气化铁道(2016年4期)2016-04-16
工业设计(2016年12期)2016-04-16
导航定位与授时(2014年2期)2014-04-27
机电信息(2014年27期)2014-02-27
河南科技(2014年22期)2014-02-27
