电气工程自动化与供电技术解析
2024-03-08 09:13中建八局山东设计咨询有限公司王永兴
电力设备管理 2024年1期
中建八局(山东)设计咨询有限公司 王永兴
随着科学技术水平的的飞速发展,电气工程自动化与供电技术在国民经济的各个领域发挥着重要的作用。电气工程自动化与供电技术的发展和应用,不仅提高了电力系统的安全、稳定、经济运行水平,同时对节能减排政策的实施和可持续发展具有重要意义。
1 电气工程自动化与供电技术以及MMC 拓扑的关系
当前,电气工程自动化、供电技术以及MMC(多电平变流器)拓扑,在现代电力系统中发挥着重要的作用。电气工程自动化是指通过采用先进的计算机技术、通信技术和控制技术,实现对电气设备的自动控制、监测和优化管理。在电力系统中,电气工程自动化技术可以提高供电可靠性、安全性和经济性,降低人工操作的复杂性和维护成本。
近年来,随着电力电子技术和高压直流输电技术的发展,供电技术在长距离输电、海上风电接入等领域得到了广泛应用,在电力系统中,MMC 拓扑可用于高压直流输电、柔性交流输电、储能系统等场合,MMC 拓扑的设计和控制技术对于提高电力系统的运行效率、降低投资成本和环境污染具有重要意义。
2 MMC 工作机理与控制方法
2.1 MMC 拓扑结构
MMC 是一种6桥臂的主电路拓扑,其中各桥臂分别通过一个电感L 和N 个子组件构成,将各相桥臂组成一个相元。其电感主要用于对因不对称DC电压瞬间值所引起的三相电流进行抑制,并能对短路时的短路电流进行有效地控制,从而提升电力系统的可靠性[1]。每个子电路均为半桥式,其中每个子电路均为IGBT+倒相二极管,外加一个直流侧悬挂电容。在各子组件中,通过对IGBT 施加的电压与输出电压的差异,实现开关的启动与切断,从而实现对开关的操作。如图1所示。
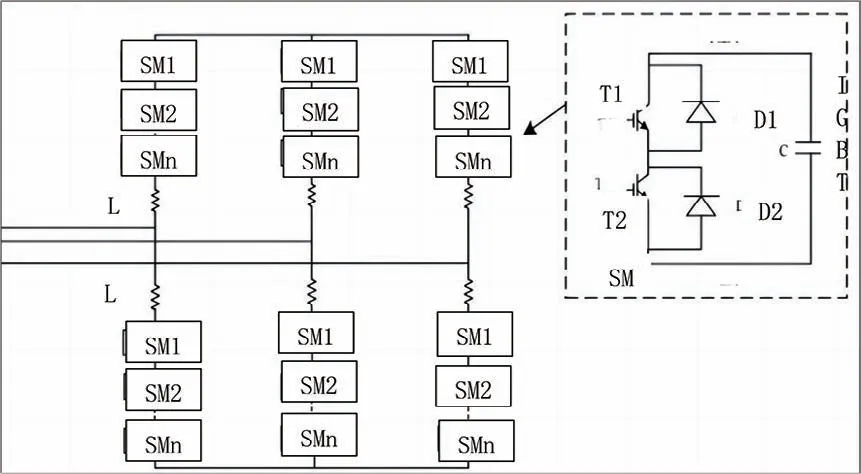
图1 MMC 拓扑结构
2.2 控制系统建模
MMC 具有对称性,这是由于其三相多晶体管结构所决定的。在这种结构中,每个相都由两个电力电子器件组成,分别是上桥臂和下桥臂。这种对称结构使得MMC 在正常运行状态下,各相之间的电流和电压相互独立,有利于提高系统的稳定性和可靠性。MMC 等效电路中假设Uk与ik为交流侧电压与电流,Upk与Urk分别为上桥臂电压与下桥臂电压,ipk与ink为上桥臂电流与下桥臂电流,Idc为直流侧电流。
由于MMC 三相桥臂与子模块参数大致相同,故而MMC 桥臂电压与桥臂电力计算方式见式(1)、式(2)、式(3)、式(4)。
结合式(1)、式(2)、式(3)、式(4),可得出桥臂环流表达方式,见式(5):
通过式(1)与式(2)能够得出:通过控制上桥臂与下桥臂子模块,便能有效控制器电容电压,从而切实实现确保直流侧电压与交流电压稳定性目的。同时,在模块化多电平换流器(MMC)的结构设计中,器件开关所能允许的电压等级成为决定单元桥臂子模块数量的关键因素[2]。为了简化分析,将子模块电容电压通过Uc表示,并将各个桥臂子模块总和使用N 表示,在此条件下,若想使其约束条件得到充分满足,可通过式(6)表示:
此外,电容与桥臂电感可通过式(7)计算得出。
式中,s 为系统容量,m 为电压调制比,N 为桥臂子模块数量,ω0为系统基础频率,ε 为电容电压波动的100%,其值在通常情况下取5%,cosφ为交流侧功率因数,IZ为环流分量幅值。
2.3 半桥型子模块工作原理
从图1可以看出,该副组件SM 为半桥型,其中T1和T2分别为IGBT.D1和D2倒相二极管,C 是子组件DC 端,为半桥型拓扑,其工作状态包括闭锁、投入、切除,需要根据功率开关元件T1和T2确定。由于各子组件的流动方向不一致,所以其工作状况也会有细微的差异[3]。相反,从子组件中出来的电流是负值,即i <0。半桥型子组件具有6个工作方式,每个工作方式分别与两个工作方式相适应。
如果断开脉冲信号被两个切换元件T1及T2所提供,则T1及T2均为闭合状态,此时半桥构造中的子组件操作的状态称为锁定(locking state),也有流向组件的电流。根据锁定方式的不同,锁定状态可以分为操作方式1和操作方式4。若子组件工作于方式1,此时i <0,则电流由A 端流动,通过反向并联二极管D1及DC 测量电容器C,最终由B 口输出;在这种运行方式中,DC 一侧的电容器C 被充电,而副组件的输出电压为u。即在DC 端的电容器上的电压u。若子组件工作于方式4,此时i <0,则电流由B 端流动,经由反向平行二极管D2,最终由A 端输出;在这种运行方式中,DC 一侧的电容器C 是旁路,当MMC系统出现异常时,则采用工作方式1,当MMC 出现故障时,则采用方式4工作方式。如果MMC 操作正确,则不会发生锁定情况。子模块工作状态见表1。

表1 子模块工作状态
3 仿真实验
在MATLAB/Simulink 环境下,利用MATLAB/Simulink 对电力电子设备进行建模,并对其进行分析。见表2。

表2 相关参数
3.1 MMC-APC 控制效果
在研究过程中,发现MMC-APC(模块化多电平换流器-有源功率控制器)的交流侧输出电压波形表现出良好的特性。具体来说,该波形为光滑且幅值为600V 的正弦波。这种特性使得MMC-APC在电力系统中具有较高的应用价值。
为了进一步了解MMC-APC 的性能,分析其上、下桥臂各子模块的电容电压波形曲线。在0.2s时刻,MMC-APC 开始工作,桥臂各子模块的电容电压在0.2s 后稳定在2000V 左右。在这期间,电压从1999.2V 波动到2000V,上下浮动范围小于0.4%,表明了对桥式子模块进行有效的直流端电压调控。
此外,在MMC-APC(模块化多电平换流器-有源功率控制器)系统中,桥臂的电流特性值得关注。经过研究发现,在0.2s 换流器开始工作后,上、下桥臂的电流逐渐趋于稳定。这些稳定后的电流共同构成了MMC 某桥臂所需的电流。然而,由于MMC 自身存在高次谐波,导致上下桥臂的电流幅度存在一定差异。这种差异也体现在了两个子模块电容器电压的不一致性上[4]。
这意味着,在MMC-APC 系统中,桥臂电流的稳定性和谐波特性对子模块电容器电压的均衡起着重要作用。这一结果充分验证了本文所提出的MMC-APC 拓扑控制策略的正确性和可行性。通过此控制策略,实现了对MMC-APC 的交流侧输出电压和桥臂子模块电容电压的有效控制,保证了系统在高电压、高功率条件下的稳定运行。
3.2 同相补偿效果
电网侧在0.2s 左右启动MMC-APC 后,电网中的三相电流波形随负载改变而改变,电网中的三相电流波形比较平稳,波形曲线表明电网中的电流和电压均较好;该变换器配合PWM 调制,使电网中的电网电压呈三段式分布,供电品质优良,功率因子趋近1,并对牵引进行反馈。
通过采用MMC-APC 变换器对负荷的波形曲线进行了有效的补偿,使负荷电流的波形变得平滑,并且具有较高的供电品质。经过对变压器原有侧的三相电流进行了补偿,使原来侧的单相不平衡型MMC-APC 在0.2s 左右运行后,产生了一种具有负序特性的补偿电流。从0.2s 起,牵引变压器次级侧进行了二次侧的补偿,使经过MMC 的二次侧电压得以提高,两相之间的电压幅度相同,相移90°。
4 改进建议
4.1 改进MMC-STATCOM 拓扑结构
通过对MMC 的基本架构进行分析,提出一种新型基于MMC 的新型多相MMC 拓扑,即将其作为一种新型的多相MMC,并将其应用于多相MMC 系统中。该方案能够在相同的出力情况下,节约了许多切换装置,并且由于桥臂间没有环路,因此无须对MMC 进行循环控制。另外,串联式变换器通常用于中高电压的场合,因此改良后的MMCSTATCOM 采用了GTO 作为H 电桥。通过比较多级平换流器所采用的装置数量,本次的比对选用了更常见的串联H 型电桥,各设计单位的用量在表3中进行了比较,当产生的等级相同时,由于该电子器件的成本更高,因此本方案能够节约电力开关设备的数量,因此能够节约电力开关设备,能够节约成本。

表3 不同类型拓扑元器件对比
4.2 改进MMC-STATCOM 调制
载波移相脉宽调制技术是一种利用特定相位相关载波信号实现脉宽调制,以减少串并联多路换流桥输出的全谐波[5]。具体研究基于多路复用的MMC 拓扑,保证各子模块所产生的三角波振幅、频率、相位差为π/N 度,并且只采用了半桥臂,因此调制波取绝对值,各单元模块也采用相同的调制波;经过改进的级联组件,其输出的电压电平是N+1,并且是馒头波,通过H 电桥,其电平数目是2N+1。为了检验这种结构最后的输出电平是2N+1,其中N 是3个子模块的2000V,H 电桥结构的输出电压是U,可以看到,经过H 电桥的转换,可以获得7个电平的电压。
5 结语
随着现代化科学技术的飞速发展,传统供电系统已无法满足人们对于高效、稳定供电的需求。因此,供电系统应当及时引入自动化控制技术,实现供电系统与自动化技术的紧密融合,既能提升供电质量,又能确保对供电系统的控制力,从而为人们提供更加可靠、优质的电力服务。通过融入自动化控制技术,可以构建更加智能、高效的供电系统,以满足人们日益增长的电力需求。
猜你喜欢
电工技术学报(2023年16期)2023-08-30
中国实用神经疾病杂志(2018年9期)2018-05-25
电测与仪表(2016年22期)2016-04-12
电源技术(2015年1期)2015-08-22
电源技术(2015年7期)2015-08-22
电气传动(2015年4期)2015-07-11
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年2期)2015-04-09
中国医药导报(2015年20期)2015-01-11
电测与仪表(2014年7期)2014-04-04