
阻尼被动减摇水舱流体动力特性分析及效果评估
2024-03-05 04:47:08唐伟炜卢蓓琳廖婧梅谭万秋
黑龙江科学 2024年4期
唐伟炜,卢蓓琳,廖婧梅,谭万秋,李 鑫
(1.广州航海学院 船舶与海洋工程学院,广州 510700; 2.青岛理工大学 理学院,山东 青岛 266520)
船舶在海上行进时不可避免地会产生较为复杂剧烈的摇荡运动,对船舶的适居性、航行使用性及安全性产生不可忽视的影响。为了减少船舶在风浪中的摇荡,改善船舶性能,在船舶上设置平面被动减摇水舱,拥有沿船宽方向完全连通的舱体,依靠较大幅度的自由液面运动产生抑制横摇的动力矩,具有体积小、设备简单等优点,减摇效果不会随航速的变化而变化,适用于各类商用大型船舶,具有很好的市场前景[1]。
1 矩形阻尼被动减摇水舱
针对两块阻尼板减摇水舱研究其减摇效果,如图1所示,尺寸为1000 mm×300 mm,阻尼板之间的间距为286 mm、428 mm、286 mm。设计若干凹槽,以便调整阻尼板的位置,针对不同海况改善船体运动状态。

图1 矩形阻尼减摇水舱
对装有阻尼板的减摇水舱来说,当水舱处于低液深时,会由于水量不足导致减摇水舱的阻尼效果较差,产生巨大的自由液面效应,如图 2所示[2]。而当水舱内舱内水位达到一定高度时,水舱的阻尼效果会有明显的增长,舱内水对水舱的击顶现象会因安装了阻尼板而有所减缓,但还是无法完全消除舱内水的击顶影响。总的来说,阻尼板安装于高液深时的减摇效果优于低液深。

图2 不同水位下的减摇水舱[3]
1.1 减摇水舱的运动模型
船舶发生横摇运动时会与舱内水相互影响,在对“船舶减摇水舱”系统进行描述时,为了简化计算,通常将舱内水简化为一束一元的流线,忽略船舶重心运动的影响[3]。“船舶减摇水舱”系统的动力学特征采用拉格朗日振动方程表达,取船舶的横摇角φ和水舱水位的相对位移z作为系统的广义坐标,φ取右舷横摇为正,对应的z取右舷舱中的水位上移为正。微幅波扰动力为Fw=Dhαe(t),对船舶和水舱分别有:
(1)
(2)
将系统中的动能T、势能F及耗散函数U代入式(1)后,得到船舶横摇运动的微分方程为:
-2cγS0z=Dhαe(t)
(3)
代入式(2)可得水舱内液体振荡运动的微分方程为:
(4)
通过对式(1)、式(2)简化可得:
(5)
(6)
式(5)中
式(6)中
其中,γ为水舱内液体的重度,S0为液面面积,b2为水舱轴线对于横摇轴的静矩,λt为水舱内液柱的相当长度。
1.2 减摇水舱内部流体动力特性分析
模拟设定水舱均处于静止状态时,舱中水深为0.08 m,给予持续稳定的波浪力矩,使舱内水随之发生晃动,以8 s即一周期为例,模拟所得两块阻尼板减摇水舱舱内水状态,如图3所示。从模拟图中可以观察出相位差,即能产生减摇效果,且每一时间相位差不同,说明产生的减摇效果不同。减摇水舱前半个周期(1~4 s)产生的复原力矩为逆时针,与船舶产生的倾斜力矩相反,且2 s时的复原力矩达到峰值,后半个周期(5~8 s)产生的复原力矩方向相反,为顺时针,并在6 s时达到峰值,详见图3。

图3 一周期内两块阻尼板减摇水舱状态
减摇水舱在非均匀水动力的作用下,水舱在摇晃过程处于不同的位置处将经历水压力的周期性变化,这种变化会导致水舱受到的水压力不均匀,因此可通过分析水压力的变化曲线对减摇水舱的减摇效果进行分析[4-5]。
当水舱受到外界刺激后,受到刺激的舱内水会向另一舷运动,当舱内水撞击到舱壁后会产生压强,即水舱舱壁的压强主要是由于舱内水的撞击。根据这一原理,在距离水舱底边0.025 m处放置监测点,得到水舱左右舱壁及阻尼板每个通道中的压强随时间的变化,如图4、图5 所示。总共计算了80 s,每1 s保存一次水舱内压强数据。其中图中力的正方向为垂直舱壁并由左向右的方向。

图4 两块阻尼板减摇水舱舱壁压力曲线图

图5 两块阻尼板减摇水舱各板压力曲线图
从图中观察到:两块阻尼板减摇水舱的冲击压强曲线左右两侧趋势大致相同且显得短粗,压强曲线上升下降趋势相对平缓,且连续地未出现间隔,水舱两侧舱壁压力之间的相位大致是反向的,说明舱内水不是静止的,而是随之左右晃荡的。舱内水与舱壁发生撞击后,根据能量守恒,舱内水的速度会随之降低,若初始能量较大,舱内水甚至会反向运动,此时缓慢运动的舱内水与后续快速运动的舱内水相遇后,会随之降低后续运动的舱内水的速度,以致等后续液体再次与液舱壁相撞时,液舱壁所受到的冲击压强降低,即在压强曲线中表现为出现峰值[4]。两块阻尼板减摇水舱阻尼板压强曲线的第一个峰值的形成原理与减摇水舱峰值的形成同理。第二个峰值是由于后续运动而来的液体质量和惯性都比较大,对阻尼板造成二次撞击,但由于本次撞击的舱内水速度相比第一次明显减小,因而造成的冲击压强也随之减小,即第二次峰值与第一个峰值相比小得多。两块阻尼板减摇水舱相邻隔板上的压强呈现反相特征,结合模拟图图6中产生的相位差可以判断水舱产生了有效的减摇效果。以2 s时为例,如图6所示,此时船舶受到逆时针波浪扰动力矩的作用,即倾覆力矩方向为正(逆时针),处于左倾状态,而减摇水舱内2号板的压力值达到第一个峰值,1号板达到第二个峰值,即减摇力矩方向为负(顺时针),处于右倾状态,即2 s时,水舱产生的减摇力矩可与船舶受到的倾覆力矩相互抵消,使船舶横摇幅度减小,从而对船舶产生减摇。

图6 波浪力矩与减摇力矩相位关系
在一个固有周期内,两块阻尼板减摇水舱在波浪中与船舶发生双共振时,即当波浪力矩频率与船舶固有频率接近时,波浪力矩与两块阻尼板减摇水舱的减摇力矩之间相位关系见图6。
2 减摇水舱减摇效果评价
将该减摇系统安装在6 m半潜式无人艇上,对波长100 m、波高1.5 m工况下的减摇能力进行评价,即与模拟仿真工况相同,其中6 m半潜式无人艇的主尺度如表1所示。

表1 6 m半潜式无人艇的主尺度
2.1 未安装减摇水舱后的横摇角
未安装减摇水舱后的横摇角按式(7)计算[5]:
( 7)
式中,C1、C2、C3、C4均为系数。
计算可得未安装减摇水舱后的横摇角φA未减摇=38°。
2.2 安装减摇水舱后的横摇角
利用OpenFOAM对两块阻尼板减摇水舱的模拟仿真,在得到各水舱不同工况下的压强曲线后还可得6 m半潜式无人艇安装减摇水舱后绕底部中线轴左右摇晃时的最大横摇角φA减摇=20°。
将安装减摇水舱前后的横摇角进行对比可得如图7所示的一周期内的减摇水舱横摇角变化曲线,将安装减摇水舱后的横摇角φA减摇和未安装减摇水舱后的横摇角φA未减摇均代入式(7)可得本研究设计的减摇水舱谐摇时的减摇效果γ=φA未减摇/φA减摇=1.9,说明该减摇装置具备减摇效果,且减摇效果良好。
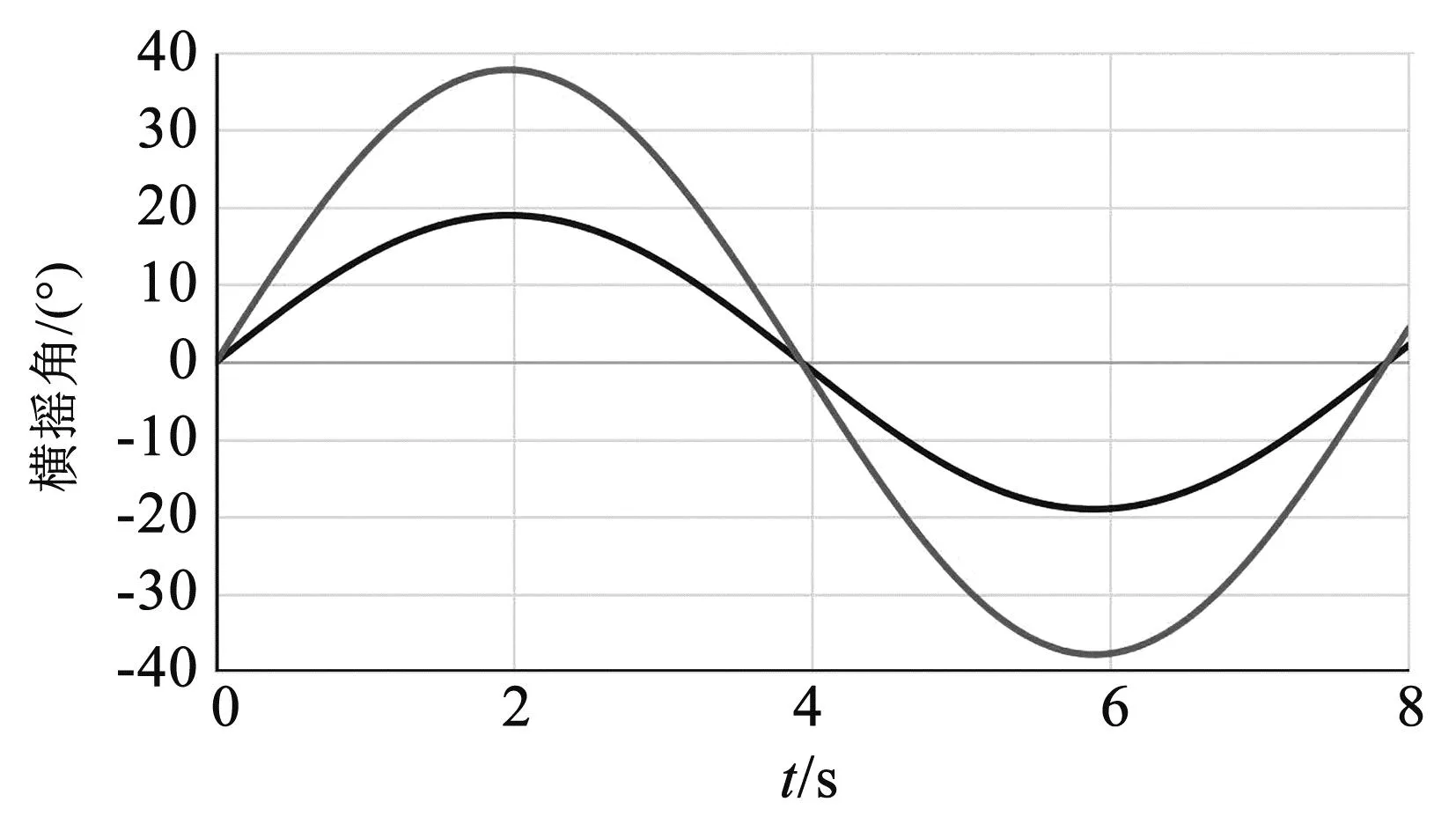
图7 安装减摇水舱前后横摇角对比曲线
3 结论
以6 m半潜式无人艇为例,使用OpenFOAM对两块阻尼板减摇水舱进行仿真模拟,对两块阻尼板减摇水舱的减摇效果进行评价。结果表明,两块阻尼板减摇水舱对半潜无人航行器有减摇效果,且减摇效果良好。
猜你喜欢
舰船科学技术(2023年10期)2023-06-15 00:59:44
海洋石油(2021年3期)2021-11-05 07:43:10
中国舰船研究(2021年4期)2021-08-31 00:46:04
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
中学生数理化·八年级物理人教版(2020年5期)2020-10-29 07:34:51
中国海上油气(2020年5期)2020-10-20 09:28:48
数学物理学报(2016年6期)2016-04-16 04:41:06
船海工程(2015年4期)2016-01-05 15:53:40
