
基于改进型滑模变结构的永磁同步电机的无位置传感器矢量控制
2024-03-05 01:37李林林周俊鹏
电机与控制应用 2024年2期
李 敏, 李林林, 周俊鹏
(重庆邮电大学 自动化学院,重庆 400065)
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)采用稀土材料制作,具有功率密度高、体积小、维护成本低和调速范围宽等优点,在工业和民用领域如电动汽车、机器人、无人机和白色家电等得到广泛应用[1-4]。在永磁同步电机的控制策略中,常采用直接转矩控制和矢量控制[5-6]。直接转矩控制在低速时定子电流和磁链畸变严重,转矩脉动较大,控制性能不佳;而矢量控制在全速域时均有较好的表现,控制性能接近于直流控制,因此在要求调速范围宽、动态性能高的场合得到广泛应用[7]。
永磁同步电机矢量控制系统的内环为电流环、外环为速度环,在电机起动及运行过程中,均需准确获取转子的位置,才能实现精确、可靠地控制。目前,转子位置的获取主要有两类:一是采用位置传感器检测转子位置;二是通过各种观测器来估算转子的位置。文献[8]采用霍尔传感器获取转子的位置。由于安装位置传感器(有感)会增加电机的体积和成本,甚至还可能降低系统的可靠性。因此,出现了无位置传感器的转子位置估计方法。在低速时,常采用高频注入[9]的方式检测转子的位置;在中速到高速范围内,可通过龙伯格观测器、磁链观测器、扩展卡尔曼滤波以及滑模观测器(Sliding Mode Observer, SMO)等[10-13]对转子的位置和转速进行估算。相较于其他观测器,滑模观测器具有鲁棒性强、实现容易以及动态性能好等特点,被广泛应用于PMSM转子位置的估算,以实现中高速无位置传感器控制。
由于滑模观测器中滑模面切换时不够平滑,抖振现象不可避免。为削弱抖振,许多研究采用各种函数来平滑滑模面。文献[14]运用饱和函数取代符号函数,来调节边界层厚度,有效削弱了抖振。文献[15]采用双曲正切函数取代符号函数,改善了滑模面的光滑程度,降低了抖振。
在控制器的选择上,目前的调速系统中,常采用比例积分(Proportional-Integral, PI)作为PMSM速度环的控制器[16],其具有简单、易于实施的特点。相较于传统的PI控制算法,文献[17]在模糊PI控制算法的基础上增加了变论域自适应控制,经过参数匹配就能够获得较好的控制效果。但是,这些研究并没有改变PI控制算法本身存在的诸如无法获得最优参数、无法适应系统模型参数变化和无法抵抗外界扰动等问题。为此,许多研究人员对非线性控制方法进行了深入研究,以提高系统的控制性能,如滑模控制(Sliding Mode Controller, SMC)、模型预测控制、神经网络控制和自适应控制等[18-21]。其中,滑模控制鲁棒性强、对外部扰动和内部参数变化不敏感,能够保证非线性系统具有较好的控制性能[22-23]。文献[22]采用滑模控制器作为速度环控制器,采用饱和函数取代传统SMC的符号函数作为滑动模态,设计了一种新型趋近律运用在滑模控制器上,来提高系统的响应速度和稳态性能。文献[23]进一步采用指数趋近律控制滑模控制器,采用可变边界层的饱和函数,降低了符号函数带来的机械延迟,加快了系统的响应速度。
文献[15]中滑模面的边界层厚度始终固定,这对于不同误差下滑动模态趋近滑模面的速度无法调节。当误差较小时,滑动到滑模面的速度太快,导致系统抖振过大;当误差较大时,滑动到滑模面的速度不够,系统延迟增大。因此,根据误差大小,设计合适的滑模面边界层厚度,在满足系统稳定性的前提下,最大限度削弱抖振,是滑模控制器设计的重难点。基于此,本文提出了一种改进型滑模变结构永磁同步电机的无位置传感器矢量控制方法,来改善系统的动、静态性能。本文主要贡献如下:
(1) 为削弱传统滑模控制所引起的抖振,本文提出一种基于改进型滑模变结构的永磁同步电机的无位置传感器矢量控制方法,设计了改进型滑模观测器(Improved Sliding Mode Observer, ISMO)和改进型滑模控制器(Improved Sliding Mode Controller, ISMC),来提升系统的动、静态性能。
(2) 采用可变边界层厚度的双曲正切函数作为滑动模态,根据误差大小,通过模糊逻辑控制对双曲正切函数的形状系数进行调整,来控制边界层厚度变化,实现更平滑的滑模面切换,以削弱系统抖振。
(3) 对设计的改进型滑模观测器和改进型滑模控制器,运用李雅普诺夫第二定理进行稳定性分析和推导,理论推导证明了所设计的控制系统的稳定性。
1 改进型滑模观测器的设计
1.1 α-β坐标系下的数学模型
在不考虑磁路饱和、磁滞损耗和涡流损耗的情况下,表贴式PMSM在静止坐标系α-β轴下的电压方程[18]为
(1)
式中:Uα、Uβ分别为α轴、β轴电压;Rs为定子电阻;iα、iβ分别为α轴、β轴电流;Ls为定子电感;Eα、Eβ分别为α轴、β轴反电动势。Eα、Eβ的表达式为
(2)
式中:ψf为永磁体磁链;we为电角速度;θ为转子位置角度。
1.2 改进型滑模观测器的设计
为实现PMSM的无位置传感器矢量控制,采用滑模观测器对电机转子的位置和转速进行估计。传统滑模观测器常采用不连续的开关函数——符号函数作为滑模面的切换函数,由于符号函数是以0为界线的阶跃函数,具有开关特性,在从正(负)到负(正)的过程中没有过渡,不平滑,因此系统输出存在较大抖振。为削弱抖振,本文采用连续函数——双曲正切函数取代不连续函数——符号函数,以平滑滑模面的切换,来削弱抖振。
图1为改进的滑模观测器结构图。实际电流和估算电流的误差作为滑模观测器的状态方程,经双曲正切函数变换后,再通过低通滤波器(Low Pass Filter,LPF)滤波得到反电动势的估计值,最后通过反电动势估算转子的位置角度,具体内容如下。
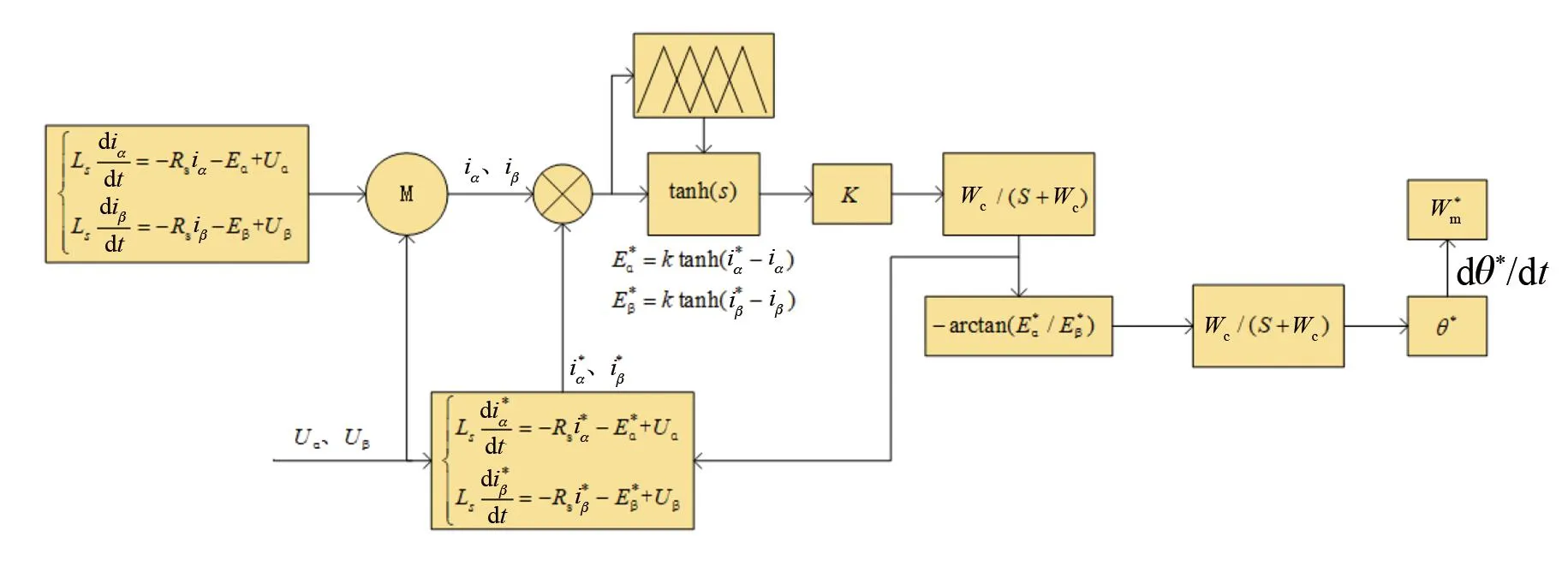
图1 ISMO结构图Fig.1 Structure diagram of the ISMO
由于滑模观测器中比较的是估算电流与实际电流的大小,因此将电压方程式(1)进行变换,得到电流方程为
(3)
将式(3)作为系统电流的状态方程,可以得到估算电流的状态方程为

(4)

将式(3)与式(4)对应等式相减,可得:
(5)
将式(5)作为滑模观测器的状态方程。通过估算电流收敛于实际电流,得到反电动势估算值。
所选取的连续开关函数——双曲正切函数的表达式为
(6)
式中:γ为边界层厚度的形状系数。
进一步,根据滑模观测器的状态方程式(5)以及双曲正切函数式(6),可得α轴、β轴的电流误差,表示为

(7)
(8)

1.3 改进型滑模观测器的形状系数设计
对于边界层在不同转速下的控制,可以根据误差值Ei的大小,构建一个模糊控制器,调节双曲正切函数的形状系数γ,来控制边界层厚度。因此,本文运用模糊逻辑控制对双曲正切函数的形状系数进行调节。如图2所示,在速度误差较小时,通过模糊逻辑控制使得形状系数变小,其形状系数γ=8,减小边界层厚度,减小抖振的幅值与频率,在电流误差值Ei趋近于滑模面的速度减小的同时,降低了系统所产生的抖振;在速度误差较大时,使形状系数变大,其形状系数γ=1,增大边界层厚度,通过趋近于滑模面的频率增加,减小抖振的幅值,在电流误差值Ei趋近于滑模面的速度增大的同时,降低了系统产生的抖振。综上所述,在不同速度下,通过调节双曲正切函数的形状系数,改变边界层厚度,能使误差快速滑动到滑模面,从而减小了抖振现象。
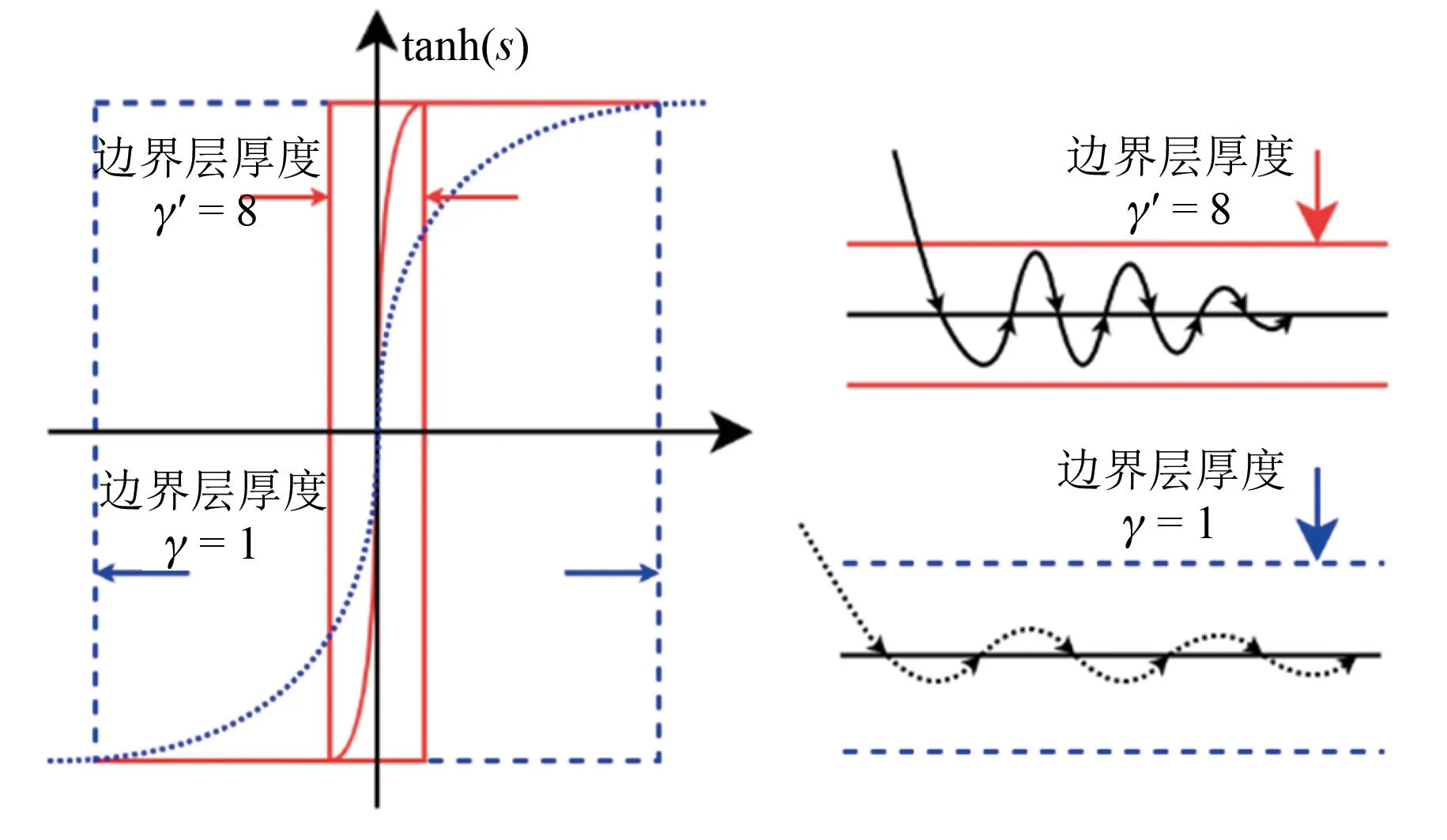
图2 不同边界层厚度的双曲正切函数及其趋近速度图Fig.2 The hyperbolic tangent function with different boundary layer thickness and velocity approaching diagram
模糊控制可以将不同电流误差下对应的边界层厚度的不确定性变为确定性。设输入误差值Ei,输出边界层厚度γ,实施步骤如下。
(1)将形状系数进行模糊化,输入量Ei的论域为[-1,1],采用如图3所示的高斯隶属度函数。

图3 输入量Ei的隶属度函数Fig.3 Membership function of input Ei
(2) 模糊规则
输入误差Ei与输出边界层厚度γ采用不同的模糊集:
Ei={-1, -0.8, -0.6, -0.4, -0.2, 0, 0.2, 0.4, 0.6, 0.8, 1}
γ={0, 0.1, 0.3, 0.7, 1.5, 3}
将上述的模糊集模糊化为
Ei={NGL, NL, NM, NS, NGS, Z, PGS, PS, PM, PL, PGL}
γ={Z, PGS, PS, PM, PL, PGL}
其中:N、Z、P分别表示负、零以及正;GL、L、M、S、GS分别表示极大、大、中、小与极小。表1为改进型滑模观测器的模糊规则。
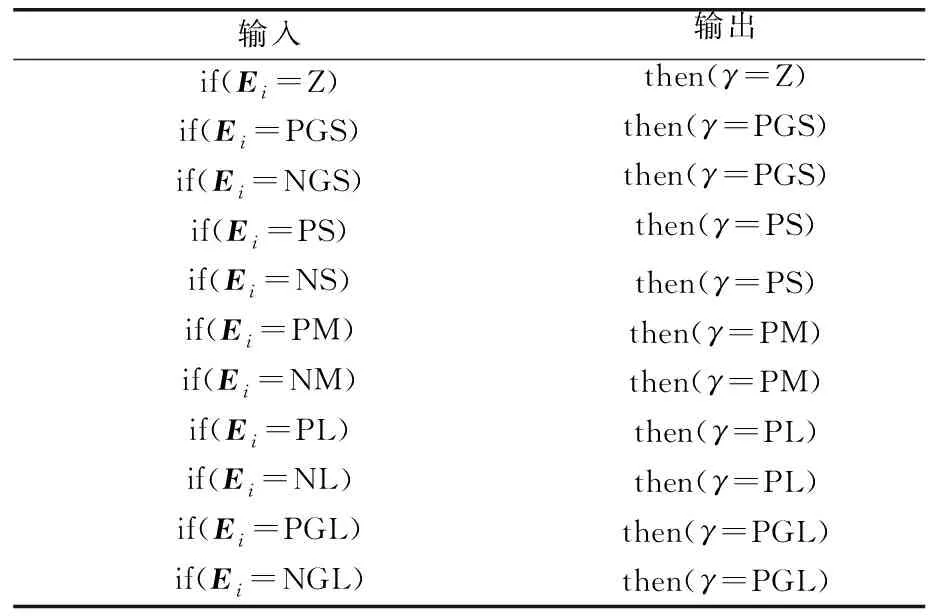
表1 SMO的模糊规则Tab.1 Fuzzy rules of SMO
(3) 采用重心法对输出量γ进行反模糊化,重心法具有更加平滑的输出控制,能够避免滑模观测器参数变化过大而导致的抖振现象。
对输出量形状系数γ进行反模糊化,图4中输出量的论域为[0,3]。该论域是将归一化后的电流误差值进行10等分而得到的。并且边界层厚度是一个非负的值,因此输出量的论域在前一个数的基础上乘以2后再加0.1,模糊集依次为{0,0.1,0.3,0.7,1.5,3}。因此论域的取值范围为[0,3],其论域的隶属度曲线为高斯隶属度函数,如图4所示。

图4 输出量γ的隶属度函数Fig.4 Membership function of output γ
1.4 改进型滑模观测器稳定性分析
改进型滑模观测器需要更加苛刻、严格的条件才能使系统达到稳定,选取李雅普诺夫函数为

(9)

(10)
将式(7)、式(8)代入式(10),要满足式(10)稳定性条件,可推导出以下不等式要成立,即:
(11)
式(11)中第1式子恒成立,故要满足系统稳定,取决于第2、3式子,要保证第2、3式子成立,需保证k的取值范围为

(12)
由式(12)可知:当k>max{k1,k2}时,所设计的改进型SMO才能达到稳定。
2 改进型滑模控制器的设计
2.1 d-q坐标系下的数学模型
通过滑模观测器获得转子位置估计信息后,需进行控制器的设计。将PMSM从静止坐标系变换到旋转坐标系d-q轴下,其电压方程为
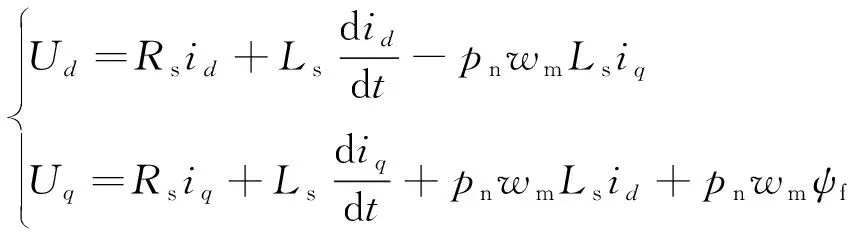
(13)
式中:Ud、Uq分别为d轴、q轴电压;id、iq分别为d轴、q轴电流;pn为极对数;wm为机械角速度;ψf为永磁体磁链。
表贴式PMSM的Ld=Lq,因此转矩方程简化为
(14)
PMSM的运动方程为

(15)
式中:J为转动惯量;Te为电磁转矩;TL为负载转矩;B为阻尼系数。
对于表贴式PMSM,采用矢量控制策略有最大转矩控制[1]、最大转矩电流比[9]以及弱磁控制[24]等。最大转矩电流比与弱磁控制需要控制励磁电流id与转矩电流iq,而最大转矩控制只需控制转矩电流iq,实现简单,能够实现高性能转矩控制,故采用最大转矩控制。令id=0,将式(13)、(15)变形为

(16)

(17)
2.2 改进型滑模控制器的设计
PMSM是一个多变量、非线性、高耦合的系统。目前PMSM的调速系统中,常采用PI作为PMSM速度环的控制器。虽然其具有结构简单、调参方便等优点,但当受到外部扰动时,PI控制器的抗干扰能力较弱、控制非线性系统效果较差。故本文利用SMC对参数不敏感、控制非线性系统效果好以及可获取最优参数等优点,设计了改进型滑模控制器。
定义PMSM系统的状态方程为
(18)
式中:e1为参考角转速与机械角速度的误差值;e2为e1的导数;wref为电机的参考角转速;wm为实际机械角转速。
将式(17)代入式(18),可得:
(19)

(20)
定义滑模面函数为
S=c1e1+c2e2
(21)
式中:c1>0,c2>0均为设计参数(常数)。对滑模面函数求导,得:

(22)

(23)
式中:ξ为增益系数;τ为形状系数。
q轴参考电流的导数表示为

(24)
从而得到q轴输入电流控制器为
(25)
从式(25)可以看出,滑模控制器包含双曲正切函数,形成了一定的边界层,能够削弱抖振;同时还包含积分项,可以减小甚至消除稳态误差,提高系统的稳态性能。
2.3 改进型滑模控制器的形状系数设计
对于边界层在不同转速误差下的控制,可以根据不同大小的误差值e1,构建模糊控制器,调节形状系数τ的大小,改变误差值e1趋近滑模面的速度,进而削弱系统抖振。与改进型滑模观测器一样,采用模糊控制对双曲正切函数的形状系数进行调节。
输入误差值e1,输出形状系数τ。将输入的速度误差进行模糊化,步骤如下:
(1) 输入变量e1的论域为[-1,1],其隶属度函数为高斯隶属度函数,如图5所示。
图5 输入量e1的隶属度函数Fig.5 Membership function of input e1
(2) 模糊规则
输入误差e1与输出边界层厚度τ采用不同的模糊集如下:
e1={-1, -0.8, -0.6, -0.4, -0.2, 0, 0.2, 0.4, 0.6, 0.8, 1}
τ={0, 0.1, 0.3, 0.7, 1.8, 4}
上述的模糊集对应如下:
e1={NGL, NL, NM, NS, NGS, Z, PGS, PS, PM, PL, PGL}
τ={Z, PGS, PS, PM, PL, PGL}
其中:N、Z、P分别表示负、零和正;GL、L、M、S、GS分别表示极大、大、中、小和极小。表2为改进型滑模控制器的模糊规则。

表2 输出τ的模糊规则Tab.2 Fuzzy rules of output τ
(3) 采用重心法对输出量τ进行反模糊化,避免滑模控制器参数变化过大出现抖振。图6中输出量的论域为[0,4],该论域是将归一化后的电流误差值进行10等分而得到的。并且边界层厚度是一个非负的值,因此输出量的论域在前一个数的基础上乘以2后再加0.1,模糊集依次为{0,0.1,0.3,0.7,1.8,4}。最后一个数相应的取大,是因为速度误差比电流误差变化的范围大,因此论域的取值范围为[0,4]。其隶属度函数为图6所示的高斯隶属度函数。
图6 输出量τ的隶属度函数Fig.6 Membership function of output τ
2.4 改进型滑模观测器稳定性分析
与PI控制器不同,改进型滑模控制器需要更加严格的条件才能使系统稳定。由李雅普诺夫公式可知:
(26)

(27)

2.5 滑模变结构无位置传感器矢量控制
图7为所设计的改进型滑模变结构无位置传感器矢量控制系统的结构框图,ISMO和ISMC分别为所设计的改进型滑模观测器和控制器。在无位置传感器的电流环中,利用采集的三相电流值,通过Clarke变换与Park变换得到同步旋转坐标系d-q下的电流;再与d-q坐标系输入的参考电流进行比较,得到的电流误差值通过内环电流PI控制器,得到同步旋转坐标系d-q下的电压;最后经过反Park变换后作为空间矢量脉宽调制(SVPWM)的输入值。在速度环中,通过改进型滑模观测器估算的速度与给定速度进行比较,然后通过改进型滑模控制器进行控制,其输出值作为Iq的输入参考值。
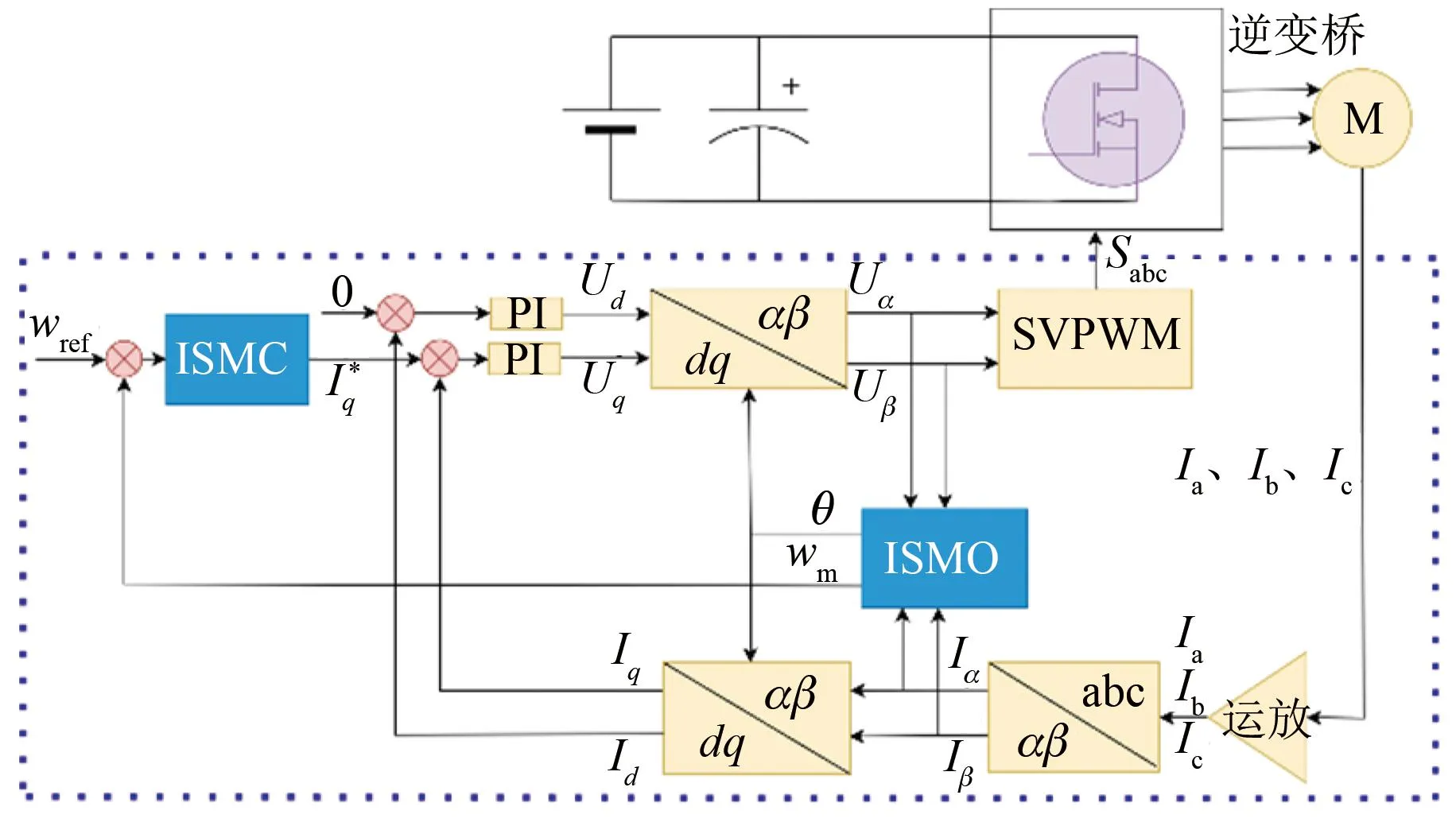
图7 改进型滑模变结构无位置传感器矢量控制系统框图Fig.7 Improved sliding mode variable structure sensorless vector control system block diagram
3 仿真结果与分析
利用Simulink及模糊逻辑算法工具箱对PMSM进行仿真建模和控制算法设计。仿真步长设置为0.03 s,表3列出了所使用PMSM的参数,表4为仿真试验中的设定参数。为验证所提方法的有效性,将所提方法与PI+传统SMO、PI+ISMO[15]和ISMC+传统SMO控制算法进行比较。

表3 电机参数Tab.3 Motor parameters

表4 仿真试验设定参数Tab.4 Simulation experiment setting parameters
在给定速度为2000 r/min的转速下运行,图8为四种控制方法在运行速度为2000 r/min的仿真结果。从图8中可以看出PI控制器+传统SMO的结构与PI控制器+ISMO的响应时间在9 ms左右,但是PI控制器+ISMO的稳态性能优于PI控制器+传统SMO的结构;ISMC+ISMO的结构无论是响应速度还是稳态性能都优于PI控制器+ISMO的结构,其响应时间为5.5 ms,超调量5%。这是因为滑模控制器对非线性系统有着更好的控制效果,能够更好的兼容响应时间与稳态性能。
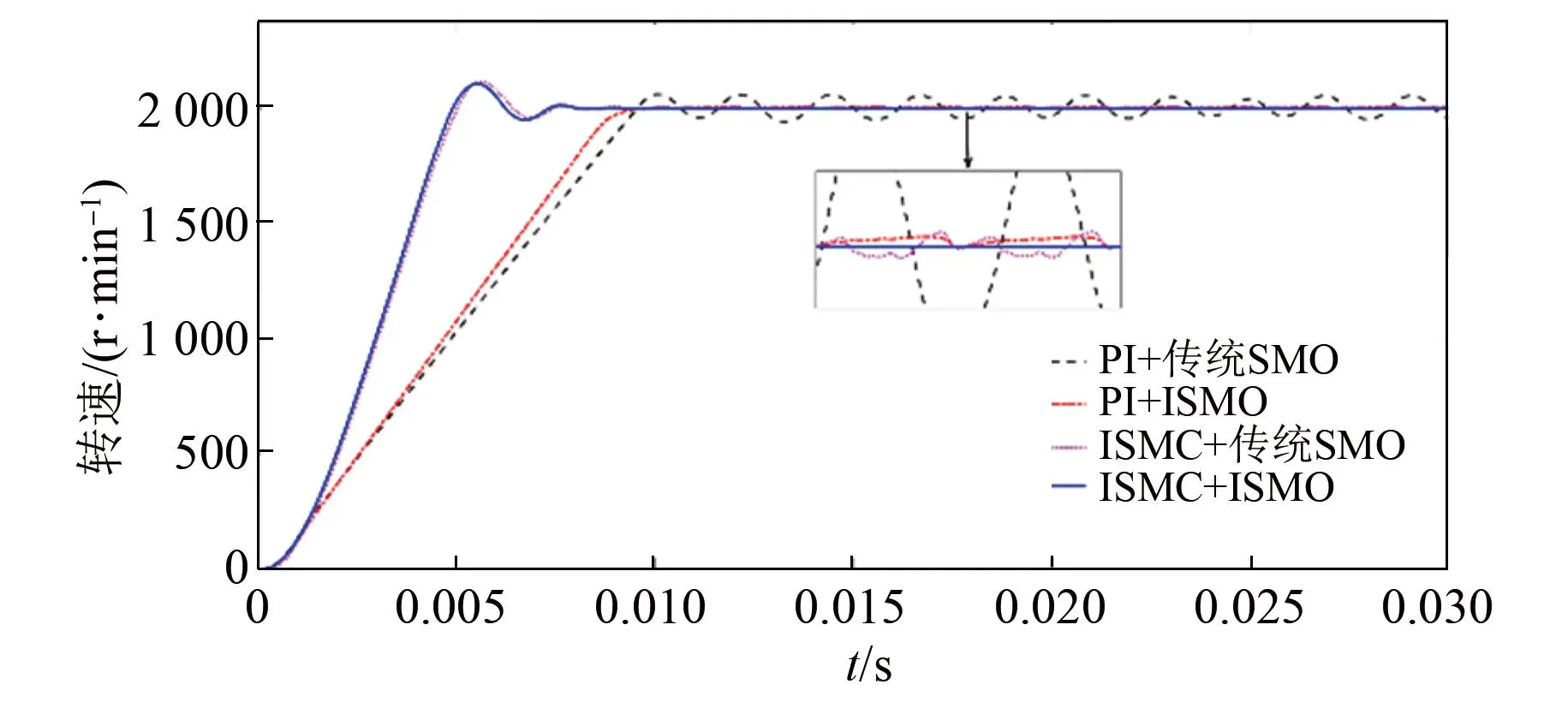
图8 四种控制方法在运行速度为2 000 r/min的仿真结果Fig.8 Simulation results of four control methods at running speed of 2 000 r/min
虽然改进型ISMC+传统SMO与ISMC+ISMO在响应速度上差不多,但是ISMC+ISMO在稳态性能上优于ISMC+传统SMO。ISMC+ISMO的转速误差值为±4 r/min,而ISMC+传统SMO的转速误差值为±14 r/min。
图9(a)为PI+传统SMO结构的实际转子角度与估算转子角度,图9(b)为ISMC+ISMO的实际转子角度与估算转子角度;图10(a)为PI+传统SMO结构的转子角度误差,图10(b)为ISMC+ISMO的转子角度误差。与图10(a)对比,图10(b)的误差波动明显更小,能够展现出ISMC+ISMO对于速度控制有着更好的跟踪效果和抗干扰能力,对于系统的稳定性能有更好的改善。
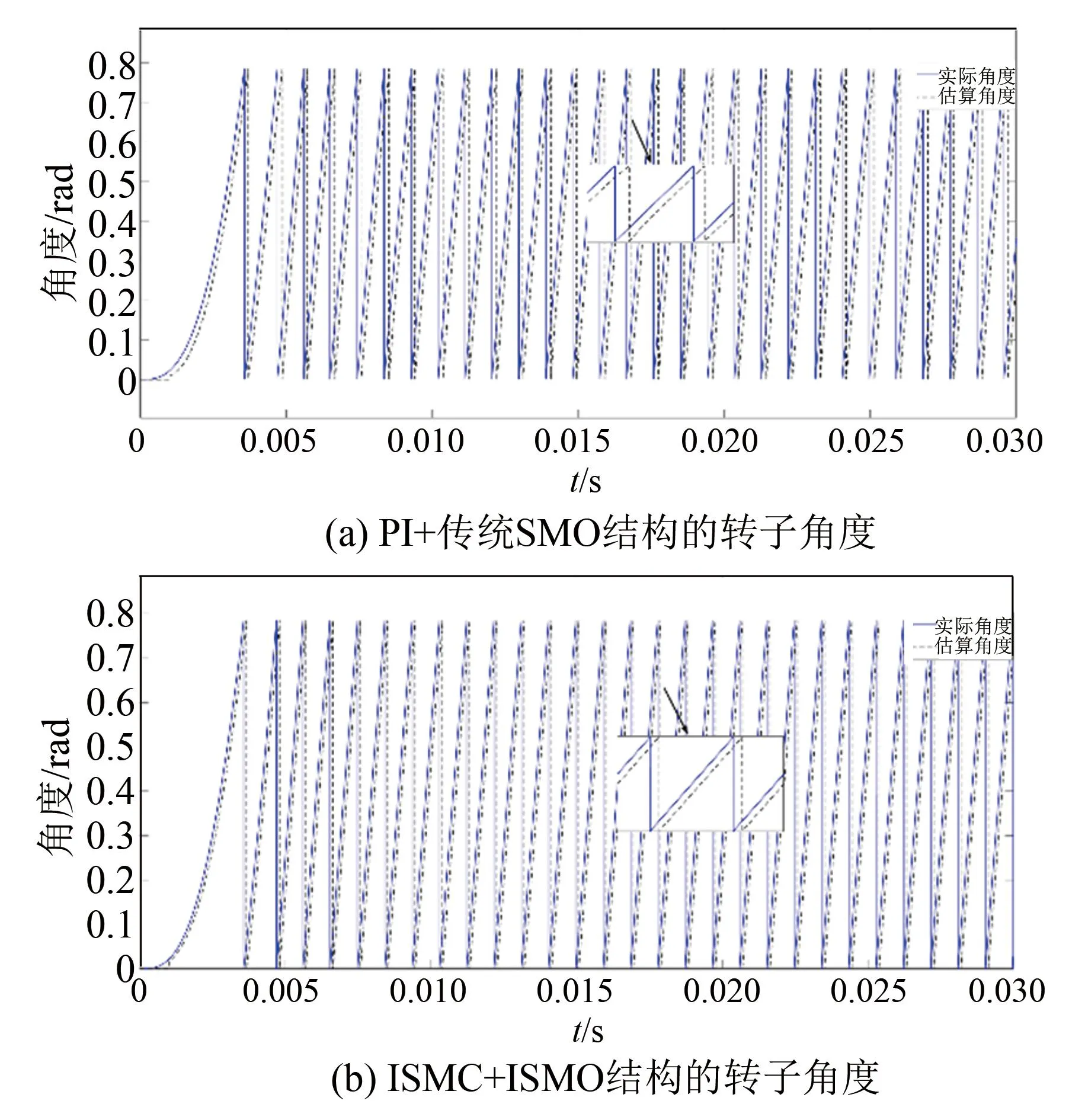
图9 PI+传统SMO和ISMC+ISMO在2 000 r/min时的转子角度Fig.9 The rotor angle of PI+ traditional SMO and ISMC+ISMO at 2 000 r/min
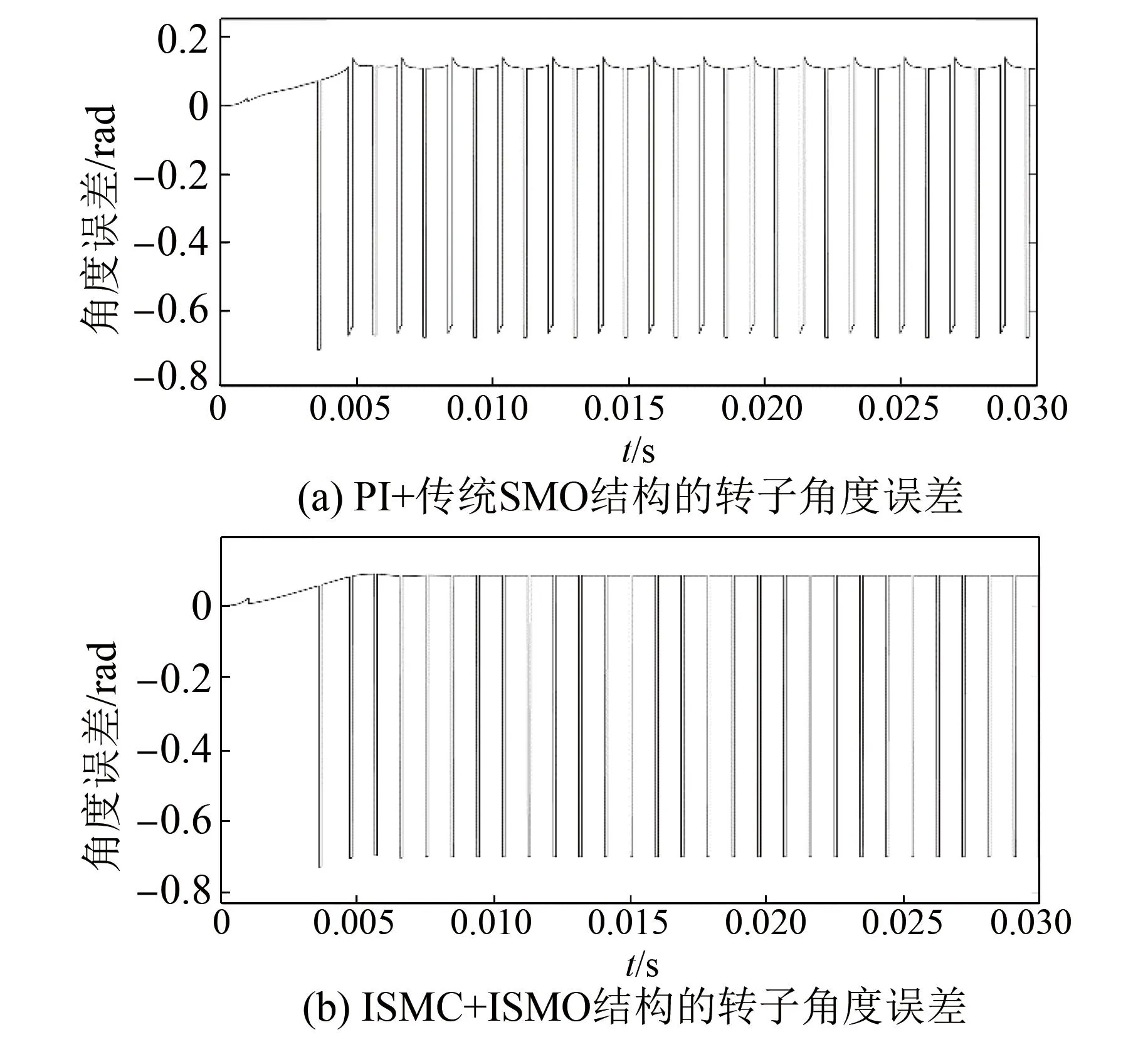
图10 PI+传统SMO和ISMC+ISMO在2 000 r/min时的转子角度误差Fig.10 The rotor angle error of PI+ traditional SMO and ISMC+ISMO at 2 000 r/min
在给定速度为1 000 r/min的转速下运行,图11为四种控制方法在运行速度为1 000 r/min的仿真结果。在图11中,PI控制器+传统SMO的结构与PI控制器+ISMO在响应时间上基本相同,均在6 ms左右。但PI控制器+ISMO在稳态性能上优于PI控制器+传统SMO;ISMC+ISMO的结构无论是响应速度还是稳态性能都优于PI控制器+ISMO的结构,响应时间为4 ms,超调量为3.2%,这是因为滑模控制器对非线性系统有着更好的控制效果以及抗干扰能力。
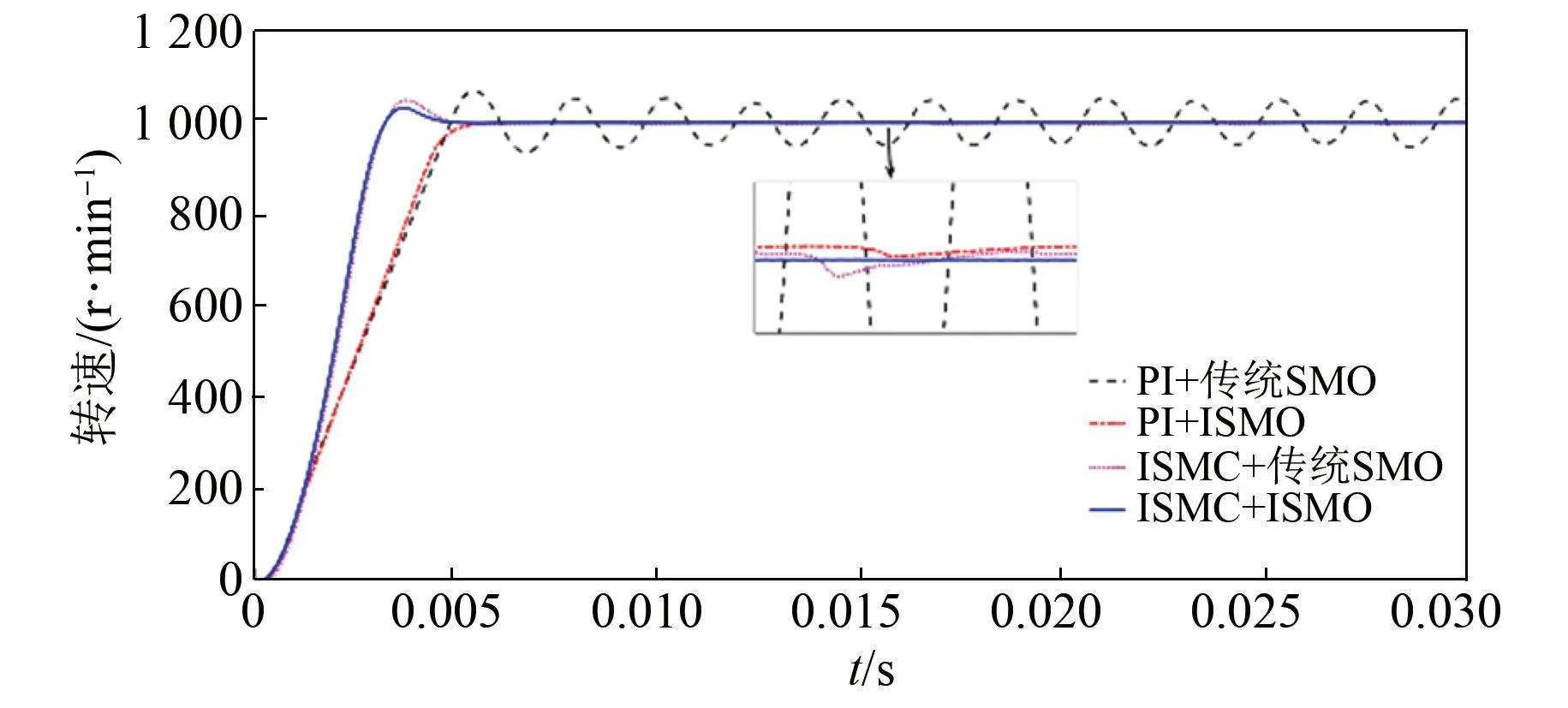
图11 四种控制方法在运行速度为1 000 r/min的仿真结果Fig.11 Simulation results of four control methods at running speed of 1 000 r/min
虽然改进型ISMC+传统SMO与ISMC+ISMO在响应速度上差不多,但是ISMC+ISMO在稳态性能上优于ISMC+传统SMO,前者转速误差值仅为±1 r/min,而后者为±4 r/min。
图12(a)为PI+传统SMO结构的实际转子角度与估算转子角度,图12(b)为ISMC+ISMO的实际转子角度与估算转子角度;图13(a)为PI+传统SMO结构的转子角度误差,图13(b)为ISMC+ISMO的转子角度误差。由图13(a)与13(b)可以得知,ISMC+ISMO相比于PI+传统SMO的误差波动明显更小,也相应地表示出滑模控制对于非线性系统的控制效果有明显的提升。

图12 PI+传统SMO和ISMC + ISMO在1 000 r/min时的转子角度Fig.12 The rotor angle of PI + traditional SMO and ISMC+ISMO at 1 000 r/min

图13 PI+传统SMO和ISMC+ISMO在1 000 r/min时的转子角度误差Fig.13 The rotor angle error of PI+ traditional SMO and ISMC+ISMO at 1 000 r/min
综上所述,虽然PI控制器对于线性系统有着非常好的控制效果,但是对于非线性系统的控制难以满足要求,如无法获得最优参数、动态性能与稳态性能存在矛盾、系统模型参数变化和外界扰动下的鲁棒性等。因此可以看出ISMC+ISMO控制系统相比于PI控制器+传统SMO控制系统,无论是在响应速度还是稳态性能,其性能均更优。
4 结语
本文采用改进型滑模控制器+改进型滑模观测器的控制结构,采用连续的开关函数——双曲正切函数取代不连续的开关函数——符号函数通过智能算法——模糊逻辑控制对双曲正切函数的形状系数进行调节,进而控制边界层厚度,实现滑模控制器与滑模观测器的变结构处理,从而削弱系统的抖振现象。
综上所述,采用ISMC+ISMO结构的控制系统,对于PMSM的无位置传感器矢量控制消抖方案,优于PI控制算法+滑模观测器控制结构,改善了系统的稳定性能,提高了系统响应速度,增强了系统的鲁棒性。仿真结果充分表明了该方案的可行性与有效性。
猜你喜欢
一重技术(2021年5期)2022-01-18
航空发动机(2020年3期)2020-07-24
测控技术(2018年4期)2018-11-25
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
应用数学与计算数学学报(2015年1期)2015-07-20
电测与仪表(2015年19期)2015-04-09
电机与控制应用(2015年2期)2015-03-01
数学年刊A辑(中文版)(2014年2期)2014-10-30
电测与仪表(2014年13期)2014-04-04
