基于UAV-LiDAR马尾松人工林树高和胸径参数提取
2024-03-02 12:54:32严小龙王书涵
农业技术与装备 2024年1期
严小龙,王书涵
(1.湖南科技大学地理空间信息技术国家地方联合工程实验室,湖南 湘潭 411100;2.湖南科技大学地球科学与空间信息工程学院,湖南 湘潭 411201)
森林是维持全球生态系统平稳运转的重要部分,在林业资源调查管理中,利用树木的胸径、树高、冠幅大小、枝下高等信息,能够准确有效地估算森林生物量、蓄积量、碳储量等数据,对评价森林系统具有重要意义。在单株尺度上估算生物量能促进生物量估算的准确性,单个树尺度上建立的森林生物量模型主要是基于胸径或胸径和树高的异速生长方程。一些异速生长方程还包括树高与胸径之比、树冠直径、树冠高度与基部面积相关,由于不同树种的生物量、胸径和树高之间的关系不同,因此针对一个地区开发的森林生物量模型可能不适用于其他地区或生态系统[1-2]。马尾松(PinusmassonianaLamb.)作为广泛分布于我国南方地区的乡土树种,其较强的环境适应能力和快速的生物量积累能力使其成为我国南方地区重要的经济用材和绿化先锋树种[3]。在大中尺度的研究调查区域内,如何快速高效地获取马尾松的树高和胸径存在困难。传统的单木信息调查方法工作量大、测量树高和冠层信息误差大、速度慢,且无法满足大区域范围的调查需求。随着遥感技术的发展,利用遥感手段的森林生物量估算方法得到广泛研究,不同尺度下的森林生物量估算方法层出不穷。但光学遥感数据只能获取森林的冠层信息,无法获树高、胸径、枝下高等信息,存在垂直空间上无法获得森林的结构参数等缺陷,且中低分辨率的光学遥感影像在单株尺度上的提取能力较弱、精度差,不能满足单木信息提取的要求。
随即出现的激光雷达LiDAR(Light Detection and Ranging)技术受到了人们的大量关注。激光雷达测距系统,一种使用激光发射器发射激光打击在目标物体上并反射回激光信号,通过计算发射器发射时间到接收器接收时间的差值来计算仪器与目标被测物体之间的距离,具有精度高、速度快等特点,激光雷达遥感已被证明能够自动测量森林生物物理参数[4-5]。与光学遥感技术不同,激光雷达LiDAR 技术能获取地面树高,但精度较低;地基LiDAR 与背包LiDAR 可以测地面所有物体的空间参数,在单个树木层面估算森林AGB 的精度很高,但在垂直结构复杂的森林中,树木冠层上部遮挡严重[6],且TLS 点云的获取非常耗时,这不适用于在大研究区域中使用。相比于地基LiDAR,无人机激光雷达UAV-LiDAR 具有更灵活、更方便、成本更低、使用范围更大的优势,能满足大中区域尺度的森林冠层信息提取要求,监测掌握森林资源现状[7]。UAV-LiDAR技术能快速获取森林的信息,如冠幅面积、树冠直径、冠幅体积、树高、以及森林郁闭度等,缺点是无法获取胸径、枝下高等参数。为了弥补UAV-LiDAR 无法获取胸径参数的缺陷,一些学者使用模型拟合的方法来解决这个问题,一般使用参数类和非参数类这两种方法。参数类的方法如常见的线性回归模型,此类方法虽然简洁,但模型的精确度依赖的样本数量可能存在共线性问题;非参数类方法如机器学习方法,对激光雷达点云数据的森林属性预测也有一定的适用性,这类算法在潜在特征多、存在多重共线性、变量之间关系先验知识少的问题下具有特别的优势。例如,Hao等人使用随机森林方法估计单株树直径[8];Pascual等人使用随机森林方法估计森林属性[9];Sun 等人采用线性回归模型(LM)、山脊正则化线性模型(LMR)、支持向量回归(SVR)、随机森林(RF)、人工神经网络(ANN)和k-最近邻法(KNN)等6种方法,利用点云和影像预测中国东北地区单株树直径[10],但加入的特征过多达到19 个,过多的特征能带来的边际效应显著,且不利于推广使用。因此,本文将探讨使用UAV-Lidar 去提取树高的精度,探究参数类方法线性回归方法与非参数类机器学习算法对少量单木特征参数拟合胸径信息的能力,并评估其模型精度。
1 研究方法与数据处理
1.1 研究方法
使用UAV-LiDAR,对研究目标区域进行点云数据收集,对点云进行预处理后,通过分割算法获取每个树的结构信息,再与实测数据对比分析,统计并分析出与胸径具有显著相关性的因子,最后使用高相关性的因子进行胸径拟合建模,从而实现从点云数据中估计出树木胸径参数的过程。其研究方法与流程如图1所示。本文所有分析、建模均在Python环境中实现。

图1 研究方法与流程Fig.1 Research methods and processes
1.2 研究区域概况与数据采集
研究林区样地位于湖南省湘潭市雨湖区湖南科技大学校内(27°54′54″N,112°54′45″E),属于亚热带季风性湿润气候,全年平均温度15~23 ℃,为稀疏林分人工林。选取的试验区域大小为5 400 m2,研究区内多为马尾松人工林,有少量的灌木。
在选定的样地内,用标准测高杆测量研究区内每一棵树的真实高度(Height),用皮尺记录冠幅的平均直径(Diameter),用胸径尺记录胸径大小(DBH),并计算出树冠面积(Crown Area);使用中海达RTK接收机记录每棵树的空间位置信息,定位误差<1 m,以便用于单木信息的准确对照。马尾松的调查统计信息如表1所示。
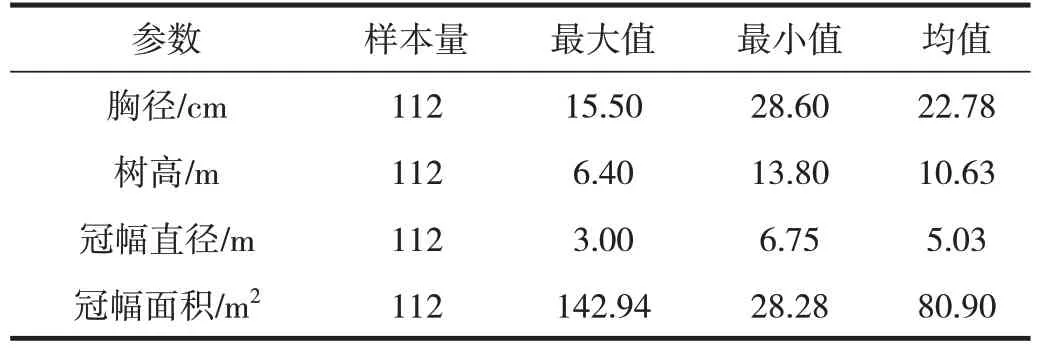
表1 马尾松样地调查统计信息Tab.1 Statistical information of Pinus massoniana plot survey

表2 点云单木参数提取信息Tab.2 Parameter extraction information of point cloud single wood
1.3 UAV-LiDAR数据采集与处理
本次点云数据采集使用大疆经纬M300 系列无人机,搭载大疆禅思L1 系列激光雷达,飞行高度110 m,飞行速度11 m/s,航向重叠85%,旁向重叠75%。使用大疆智图软件输出点云las数据。将采集的点云进行拼接、去噪并进行地面滤波,把点云分为地面点和非地面点。目前滤波法主要有CSF 滤波、形态学滤波、移动曲面滤波、坡度滤波、渐进三角网滤波等[11-13]。根据测区地形起伏的特征,选取渐进三角网滤波方法进行处理[14],生成DEM。为了消除地形对点云树木分割的影响,对测区的点云数据进行归一化处理,其基本操作是将点云的Z 值减去相应位置的DEM 数据的高程值,得到点云的绝对高程值,如果这个Z值是位于树木点云的最高值,那么这个Z值就是树高。归一化后的点云消除了不同地面高程对植物高程的影响,以便获取马尾松的准确树高。
1.4 单木参数提取
将经过预处理得到的数据导入点云处理软件点云魔方(PCM),利用点云数据和DEM 数据,基于点云分割树木的方法[15],根据测区树木特征和多次试验,以树顶最小间距2 m 为合适的阈值,最小分割点数为10 个点。为了减少地面灌丛的干扰和林木的错分,经多次试验,将最小树高设置为2 m,能有效识别出非树木和灌丛点云。经过这一步处理后,得到测区的每一颗树独立的点云和结构参数,包括树高(Height)、冠幅直径(Diameter),冠幅面积(Crown Area)、冠幅体积(Crown Volume)、枝下高(Under Branch Height)等参数。为区别实测数据,在点云提取的参数英文名称后添加LiDAR。另外,所有单木参数简写均为英文大写字母组合,如点云冠幅面积(CAL)。
1.5 建模方法
1.5.1 线性回归模型
对于参数化的方法,线性回归模型是一种常用、可靠的模型,一般表示为:
式中:a0为偏置项,a1,a2,…,an为回归系数,表示归一化特征的影响程度;x1,x2,…,xn为归一化特征;y为树的预测的胸径,cm;ε为误差项。
线性模型中,目标值被期望为特征的线性组合。随着预测因子数量的增加,线性回归模型系数不稳定,在数据样本较小的情况下,具有较高的标准误差。
1.5.2 随机森林
随机森林(Random Forest)是一种机器学习方法,在处理非线性问题上具有强大的优势[16-17]。它是一种基于众多决策树作为评估器的集成学习算法,采用Bagging 的方法有放回的抽样组成训练集,在回归问题中,其结果不依赖于单棵决策树,而是每个决策树都会对特征进行预测,再将所有的预测结果求其平均,得出的平均预测值。每个估计量是通过从训练数据集中提取一个bootstrap样本,并随机选择指定数量的特征作为预测变量来生成的。本试验将总数据70%作为训练集,30%作为验证集。
1.5.3 极端梯度提升
极端梯度提升算法XGBoost(Extremegradient Boosting),和随机森林算法同属于集成算法,不一样的是,随机森林的每棵决策树是独立运行,评估结果不影响其他树,XGBoost是基于梯度提升的弱评估器学习模型,XGBoost 的每棵树都在叶子节点上预测一个分数(Predict Score),成为叶子权重,同时也是弱评估器的叶子节点的回归取值,每个决策树评估器会预测一个叶子权重,其整体预测结果受到所有若评估器的影响[18],其基于梯度提升的算法的模型预测如式(2)所示,相比于随机森林算法,能很好地平衡泛化误差与模型复杂度,在偏差和方差中找到其共同最低点,不易过拟合。试验数据划分同RF算法一致。
式中:fm(xi)为第i棵决策树;xi为样本i对应的特征向量;K为决策树的总量;fk表示弱评估器上的叶子权重;yi为所有若评估器上的叶子权重的总和,即为预测DBH(cm)回归值。
1.6 模型评估
在建立树高提取验证和低特征量胸径模型拟合后,需对建立的关系模型进行验证,本文使用决定系数R2,均方根误差RMSE定量评估各模型的性能。
式中:yp为模型估测值;yt为实际观测值;n为样本数;ymean样地观测平均数。
2 结果与分析讨论
2.1 点云数据与实测数据的相关性
在python 软件环境中,将单木分割后的马尾松的结构参数信息与实地调查得到的112 个马尾松样本的单木参数进行皮尔逊相关性分析,得到的相关性如图2所示。

图2 皮尔逊相关性Fig.2 Pearson correlation
2.2 树高模型拟合
基于上述相关性的分析,将激光雷达点云提取高度与实测树高进行模型拟合,在112 个马尾松样本中,选择70%的数据作为模型建立,选择30%的数据进行模型验证,其模型预测结果如图3所示。
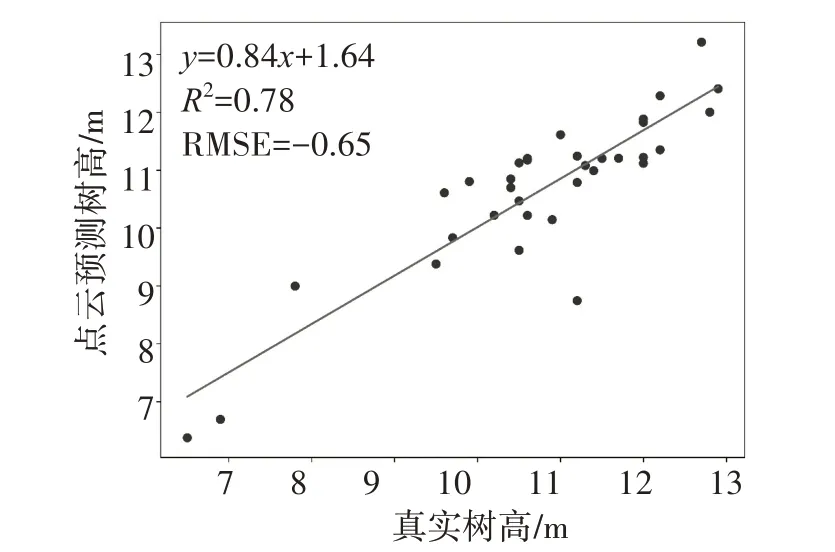
图3 树高拟合验证图Fig.3 Tree height fitting validation graph
机载激光雷达点云获取的树高和实测树高的相关性较高,且拟合模型的R2达到0.78,RMSE 为0.65 m,说明该树高模型具有很高的解释度。机载激光点云数据与实际树高存在强烈的相关性,用机载激光雷达获取的树高模拟真实树高具有实用性,此结果与耿等人的结论相符[19-20],但在10 m 以下的树高拟合中,存在方差较大的问题。
2.3 基于特征拟合胸径模型
本文将从点云中提取出的胸径DBH、树高THL、树冠直径CDL、树冠面积CAL、树冠体积CVL、枝下高UBH等参数的验证集数据分别使用3 种回归算法对胸径真实DBH进行拟合,其多元逐步回归拟合模型的精度如表3中模型R2与模型RMSE所示;胸径拟合模型的胸径预测值与实际值进行分析,其结果如图4与图5所示。
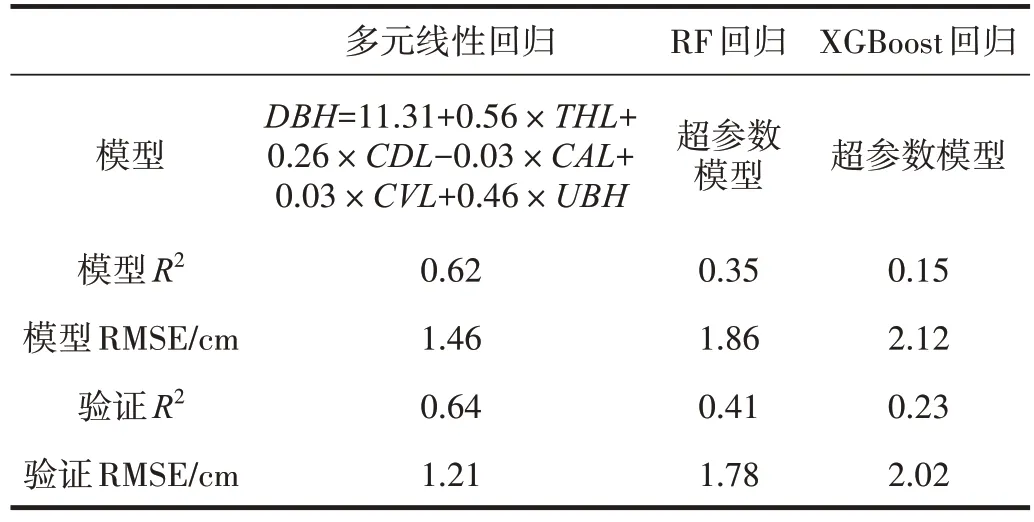
表3 胸径预测模型精度评定Tab.3 Accuracy evaluation of DBH prediction model
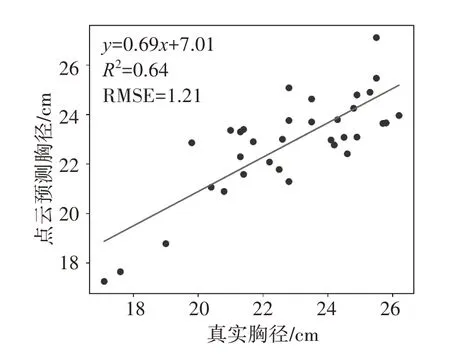
图4 多元回归算法预测DBH模型评估Fig.4 Multiple regression algorithm predicted DBH model evaluation
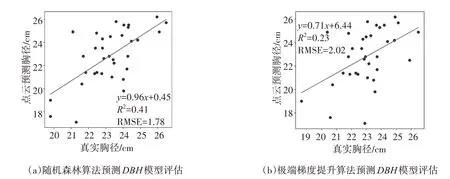
图5 随机森林与极端梯度提升算法预测DBH模型评估Fig.5 Evaluation of prediction DBH model with random forest and extreme gradient lifting algorithm
从图4 中可以看出,多元线性回归建模的R2为0.62,建模的RMSE 为1.46 cm,预测出的胸径DBH 与实际值相差较小,验证模型的RMSE=1.21 cm,模型验证的决定系数R2为0.64,证明利用低特征的单木点云参数能在很大程度上表述实际单木的胸径值。在机器学习算法中,超参数的值在一定程度上能够影响模型的精度,对两个算法采用十折交叉验证得到最佳模型,并打印其最佳超参数,随机森林(RF)算法的随机树种子n_estimators 为100,最大深度max_depth 为5;极端梯度提升(XGBoost)算法的弱评估器数量n_estimators 为100,最大深度max_depth 为4,并用验证集数据验证模型结果,但进行验证的模型在实验中并没有取得理想的结果。RF回归建模R2为0.35,RMSE为1.86 cm,验证R2为0.41,RMSE 为1.78 cm;XGBoost 回归模型建模R2为0.15,RMSE 为2.12 cm,验证R2为0.23,RMSE 为2.02 cm。
3 结论与讨论
基于UAV-LiDAR 点云数据提取的马尾松单木参数中,树高、冠幅直径、冠幅面积、冠幅体积、枝下高等参数与实际调查的树高和胸径都存在较高的相关性。
在树高拟合中,点云提取的树高能在很大程度上拟合真实树高,其马尾松树高拟合模型为:DBH=11.31+0.56×THL+0.26×CDL-0.03×CAL+0.03×CVL+0.46×UBH,R2为0.78,RMSE 为0.66 m,树高>10 m 的马尾松中,存在较小的RMSE,相比于庞、刘等人对单木胸径的拟合模型[21],此模型的误差最大来源可能是树梢实测数据不够精确。总的来说,基于机载激光雷达的点云提取马尾松单木信息具有可靠性。
在仅有点云提取信息的特征中,上述3种回归方法对胸径信息进行拟合,多元线性回归算法的R2最高,达到0.62,RMSE 为1.46 cm;预测精度R2为0.64,RMSE 为1.21 cm,具有较高精度,在一定程度上能为大范围的林地基于机载点云信息拟合胸径参数提供支持。此外机器学习的方法在多特征的回归拟合中有着更好的精度,但在低特征量的回归模型中的表现并不如多元线性回归模型,在实际过程中,需要基于不同的需求考虑点云特征的获取成本来选择胸径拟合模型。
猜你喜欢
东北林业大学学报(2023年6期)2023-05-31 02:56:16
农业工程学报(2022年14期)2022-10-19 02:24:48
丽水学院学报(2022年2期)2022-04-19 01:22:10
地理空间信息(2021年10期)2021-11-14 10:01:12
林业科技情报(2021年3期)2021-09-01 02:01:26
绿色科技(2019年5期)2019-11-29 13:17:37
遥感信息(2019年1期)2019-03-22 01:38:16
森林工程(2018年5期)2018-05-14 13:54:30
中南林业调查规划(2017年1期)2017-12-19 00:58:07
广西林业科学(2016年1期)2016-03-20 05:33:00