
Stabilization With Prescribed Instant via Lyapunov Method
2024-03-01 11:02:54JiyuanKuangYabinGaoYizhuoSunAohuaLiuandJianxingLiu
Jiyuan Kuang , Yabin Gao , Yizhuo Sun ,Aohua Liu , and Jianxing Liu
Dear Editor,
This letter presents a prescribed-instant stabilization approach to high-order integrator systems by the Lyapunov method.Under the presented controller, the settling time of controlled systems is independent of the initial conditions and equals the prescribed time instant.With this method, the prescribed-instant stabilization method can be easily proved and extended.To be more specific, two differential inequalities of Lyapunov functions are presented to clamp/constrain the settling time to the prescribed time instant from both the left and right sides.This thought serves as an example to present a general framework to verify the designed stabilization property.Actually, the prescribed-time stability (PSTS) [1] can not prescribe the exact settling time.It can only prescribe the upper bound of the settling time and is different with this work.The detailed argumentation will be presented after a brief review of the existing important research.
Traditional asymptotic stability ensures system states converge to equilibrium as time goes to infinity.It implies that system states never reach an equilibrium within any specific time period.Finitetime stability (FNTS) guarantees that the system states convergence happens in a finite time but mostly depending on system parameters and initial conditions [2].Moreover, when some states are unavailable, a finite time differentiator or observer can be used.Then, the correct information can be estimated after a finite time [3].This makes it easier to get the closed-loop system stability.However, this finite time increases as the initial values of system states increase and there are no uniform bounds of the settling time.To solve this problem, some new algorithms should be considered.
The fixed-time stability (FXTS) guarantees the settling time be bounded by a constant, which is determined by the controller parameters [4].However, its settling time is usually far smaller than the fixed time.The predefined-time stability (PDTS) gives an accurate supremum of the settling time.This supremum is usually an explicit parameter of the controller [5].The FXTS and PDTS restrict the settling time by using the power of system states.The PSTS introduces the timetinto the controller and ensures the system states converge to zero in a prescribed timeTp, whereTpis also an explicit parameter of the controller [6].Some simulation results of PSTS even show the settling time equal to the prescribed timeTp[7].This means that prescribed-time control may have the ability to achieve the so-called prescribed-instant stability (PSIS).However, their corresponding theoretical analysis cannot explain this ability, except for some firstorder systems.A detailed analysis can be seen in Remarks 1 and 2.
Up to now, only a few research with strict proof showed that the settling time can be arbitrarily manipulated.For example, the work in[8] showed this property by presenting a detailed analysis of the infinitesimal order of the system states.Although its PSIS analysis is presented only for the first-order state, the full-state PSIS is easy to come out with.In [9], reduction to absurdity was utilized to get the exact settling time.The PSIS was established with strict proof for the first time.However, these methods of proof are circumscribed and can hardly be generalized.For more complex systems with mismatched disturbance, state constraint, or input saturation, it is difficult to analyze and obtain the PSIS by the method given in [8], [9].However, most of these problems have been well studied in existing control theory with the Lyapunov method.We believe that the PSIS will be developed quickly as long as it is analyzed under the framework of the Lyapunov method.Further applications such as consensus control of multi-agent systems may provide amazing performance [10], [11].
This letter considersn-order integrator systems, of which the settling time under the presented controller is exactly the prescribed time instant.A corresponding proof based on the Lyapunov method is utilized to provide a general framework to ensure the exact settling time.Moreover, this framework can also help to decrease potential conservativeness in the settling time existed in the traditional PSTS.
Problem statement: Consider the following system:
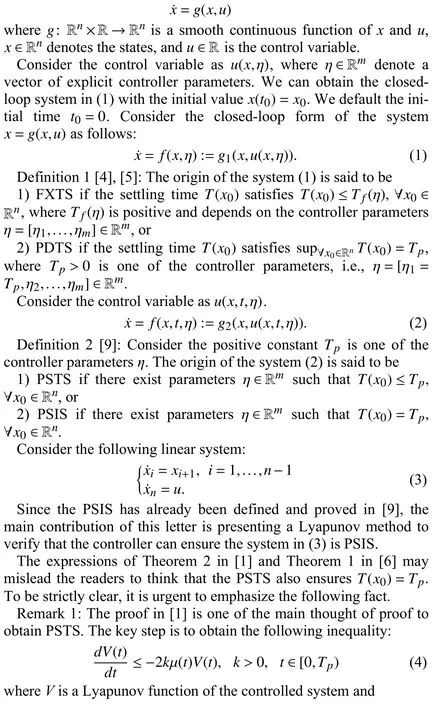


As presented in Fig.1, each state is stabilized to the desired valu att=Tp=0.5s.One characteristic of the PSIS is presented in Fig.1(b), i.e.,ustrikes zero att=Tp=0.5s.e
Conclusion: This letter provides a proof framework based on the Lyapunov method to ensure that the real convergence time of a highorder integrator system equals the prescribed time instant.Therefore,the settling time is irrelevant to the initial conditions and can be any physically feasible assigned time instant.A simulation with a simple pendulum system has verified this approach.Extending the proposed method to get PSIS for the systems with matched and mismatched disturbance is a consequential topic in the future.

Fig.1.Trajectories of (a) x1 (angle), and x2 (angular velocity); (b) u (equivalent control), and T (torque applied to the pendulum).
 IEEE/CAA Journal of Automatica Sinica2024年2期
IEEE/CAA Journal of Automatica Sinica2024年2期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Reinforcement Learning in Process Industries:Review and Perspective
- Communication Resource-Efficient Vehicle Platooning Control With Various Spacing Policies
- Virtual Power Plants for Grid Resilience: A Concise Overview of Research and Applications
- Equilibrium Strategy of the Pursuit-Evasion Game in Three-Dimensional Space
- Robust Distributed Model Predictive Control for Formation Tracking of Nonholonomic Vehicles
- Geometric Programming for Nonlinear Satellite Buffer Networks With Time Delays under L1-Gain Performance