
Advancements in Humanoid Robots: A Comprehensive Review and Future Prospects
2024-03-01 11:02:54YuchuangTongHaotianLiuandZhengtaoZhang
Yuchuang Tong ,,, Haotian Liu , and Zhengtao Zhang ,,
Abstract—This paper provides a comprehensive review of the current status, advancements, and future prospects of humanoid robots, highlighting their significance in driving the evolution of next-generation industries.By analyzing various research endeavors and key technologies, encompassing ontology structure,control and decision-making, and perception and interaction, a holistic overview of the current state of humanoid robot research is presented.Furthermore, emerging challenges in the field are identified, emphasizing the necessity for a deeper understanding of biological motion mechanisms, improved structural design,enhanced material applications, advanced drive and control methods, and efficient energy utilization.The integration of bionics, brain-inspired intelligence, mechanics, and control is underscored as a promising direction for the development of advanced humanoid robotic systems.This paper serves as an invaluable resource, offering insightful guidance to researchers in the field,while contributing to the ongoing evolution and potential of humanoid robots across diverse domains.
I.INTRODUCTION
HUMANOID robots are meticulously designed machines that closely imitate human appearance and behavior, proficiently replicating functions such as perception, decisionmaking, and interaction [1].Inspired by human intelligence and adaptability, these robots have made significant advancements that surpass previous limits.The primary goal is to create humanoid robots capable of ongoing learning and adaptation in unstructured and dynamic environments, ultimately benefiting individuals and propelling the advancement of humanity [2]-[4].
Humanoid robots possess distinct advantages compared to other robot forms.Their human-like design, encompassing torso, arms, and legs, enhances their adaptability to humancentric environments, fostering societal acceptance and enabling complex interactions [5].This anthropomorphic design facilitates natural human interaction, making them valuable for fields like healthcare and education.Bipedal mobility allows humanoid robots to navigate human spaces efficiently,while their advanced manipulation and dexterity make them capable of intricate tasks [6].Their cognitive abilities enhance autonomy and adaptability [7].Moreover, their human safety features, social acceptance, and adaptability to human environments contribute to their suitability for collaborative roles[8].Despite these advantages, challenges such as balance and energy efficiency persist, making continued research crucial for unlocking their full potential across various domains.
Humanoid robotics, an interdisciplinary field encompassing mechanics, electronics, computer science, artificial intelligence, sensing, and actuation, stands at the forefront of scientific and technological research [9]-[11].Through progressive research, our comprehension of the structural and functional aspects of humanoid robots has significantly advanced[12], [13].Pioneering breakthroughs in biomimetic structures,materials, biological information perception, and braininspired intelligent control have yielded remarkable experimental applications, showcasing the vast potential of humanoid robots.Nevertheless, a notable disparity remains between the current functional capabilities of humanoid robots and the intricate capacities exhibited by humans [14], [15].
Furthermore, humanoid robots serve as prominent symbols of a nation’s technological capabilities and innovative prowess, owing to the intricate mechanical and electronic components they embody [16]-[20].Significant progress has been made in enabling these robots to navigate bipedally in diverse environments, demonstrating their adaptability and versatility [21].The design and control processes of humanoid robots have received significant attention, leading to rapid advancements in motion planning, robot vision, and behavioral control through the implementation of learning algorithms [22]-[24].However, achieving highly intelligent and versatile humanoid robots remains a formidable challenge in the fields of robotics and artificial intelligence.Unleashing their full potential requires further breakthroughs in both hardware and software domains [25]-[27].
Despite persistent challenges, humanoid robots hold extensive potential for applications across various domains of human life, including military operations, industry, rescue missions, healthcare, education, assistance, entertainment, and agriculture [28], [29].Their widespread utilization drives the development of next-generation industries and expands the scope of robotic applications, encompassing areas such as national defense, intelligent manufacturing, and social services.Looking ahead, humanoid robots are poised to assume a prominent role in daily life applications, emerging as one of the most significant forms of intelligent robots [30].
Humanoid robots have reached the apex of technological innovation, propelling the advancement and evolution of nextgeneration industries.This comprehensive paper provides an in-depth review of the current status, advancements, and future prospects of humanoid robots, encompassing key technologies and research endeavors.By addressing emerging challenges and emphasizing the integration of bionics, braininspired intelligence, mechanics, and control, the paper serves as a valuable resource for researchers and practitioners.It contributes to the continuous evolution and potential of humanoid robots in diverse domains, fostering interdisciplinary integration and propelling advancements in various fields such as bionics, artificial intelligence, computer science, and material science.Ultimately, this review informs future development and planning, promoting the integration of disciplines for the next generation of humanoid robotic systems.
The paper is organized as follows: Section I introduces the review.Sections II-V delve into different facets of humanoid robots, including research overview, structure and mechanism,control and learning, and perception and interaction.Section VI is dedicated to exploring potential applications of humanoid robots.Section VII delves into future trends and challenges within the field.Section VIII provides a comprehensive conclusion.The main contributions of the paper can be summarized as follows.
1) This paper provides a comprehensive overview of the current state, advancements, and future prospects of humanoid robots, imparting a holistic understanding of this domain.
2) This paper thoroughly investigates fundamental aspects of humanoid robot technology encompassing ontology structure, control, learning, and perception, with the aim of advancing broader research in the field.
3) This paper highlights the potential applications of humanoid robots, emphasizing their adaptability and potential integration into human life.
4) This paper outlines future trends and challenges in humanoid robot research, providing guidance through research directions and challenges for development and utilization.
II.OVERVIEW OF HUMANOID ROBOT RESEARCH
This section presents a comprehensive overview of the research on humanoid robots, including historical advancements and an analysis of the current research status in the field.
A. Historical Progression of Humanoid Robots
The exploration of humanoid robots began in the 1970s and gained significant momentum in the early 21st century.They progressed from imitating human appearance and basic movements to evolving into intelligent systems with human-like attributes.This evolutionary progression unfurls through three discrete developmental stages, as depicted in Fig.1.

Fig.1.Historical progression of humanoid robots.
The initial stage, commencing in the late 1960s, witnessed the nascent advancement of humanoid robots, exemplified by the bipedal walking robots pioneered by Waseda University.This institution spearheaded the research in this domain, and their series of robots, including WAP (Waseda Automatic Pedipulator), WL (Waseda Legged), WABIAN (WAseda BIpedal humANoid) , and WABOT (WAseda roBOT), successfully accomplished fundamental walking functionalities[9].Concurrently, research institutions in Japan, the United States, the European Union, and South Korea also ventured into the field of humanoid robotics, attaining substantial advancements.Throughout this period, the primary emphasis lay in realizing bipedal walking functionality and establishing a foundational level of control [31]-[34].
The second stage of humanoid robots marked a significant advancement with the introduction of highly integrated systems, exemplified by Honda’s humanoid robots.During the 21st century, the integration of sensing and intelligent control technologies enabled these robots to possess rudimentary sensory systems, allowing them to perceive basic information from their surroundings.Leveraging these sensory inputs, they demonstrated the ability to make simple judgments and adjust their movements accordingly, leading to smoother and continuous locomotion.A prominent example of this stage was Honda’s humanoid robot “ASIMO2000”, unveiled in 2000,which not only resembled humans but also showcased predictive capabilities by anticipating future movements and proactively adjusting its center of gravity.This innovation allowed for seamless walking during turns, making ASIMO2000 the first globally influential humanoid robot [35].Other notable robots from this era include Sony’s “QRIO” [36], which debuted in 2003 as the first humanoid robot capable of running, as well as “BIP2000” [37] from France, Sony’s “SDR”series [38], and South Korea’s “HUBO” [39].These robots exhibited impressive capabilities such as standing, navigating stairs, running, and engaging in physical exercises.
The third stage showcases breakthrough progress in humanoid robot development, with Boston Dynamics and Tesla leading the way in achieving highly dynamic motion.Advancements in control theory and technology have boosted their cognitive capabilities, enabling them to perform intricate movements independently and with stability.These robots can make informed decisions based on their judgment and surroundings.For instance, Honda’s ASIMO robot can perform delicate tasks like grasping objects and pouring liquids accurately by integrating visual and tactile object recognition technologies.It can also respond to voice commands and gestures[40].Boston Dynamics’ ATLAS robot showcases human-like perception, judgment, and decision-making skills, demonstrating dynamic abilities such as navigating conveyor belts,avoiding obstacles, and maintaining balance even in challenging scenarios [41]-[43].“Petman”, another creation by Boston Dynamics, mimics human physiology by regulating body temperature and perspiration [44], [45].Tesla’s humanoid robot,“Optimus prime”, is anticipated to revolutionize mass production and contribute to the industrial progress of humanoid robotics [46].These breakthroughs signify a remarkable advancement, holding promising potential for further strides in intelligent robots capable of intricate tasks.

Fig.2.The mapping knowledge domain of humanoid robots.(a) Co-citation analysis; (b) Country and institution analysis; (c) Cluster analysis of keywords.
The entry of renowned companies like Tesla into humanoid robotics highlights the significance of established innovators venturing into new technology areas.Such companies bring attention, funding, and talent, crucial for capital-intensive fields like robotics.Academia contributes by laying theoretical foundations, conducting early research, and fostering innovative ideas.Ideally, collaboration between academia and industry is essential, with academia providing information for industrial applications, and industry offering real-world challenges and data.Humanoid robot development is interdisciplinary, necessitating a diverse ecosystem [47].Ethical and regulatory considerations become crucial as robots integrate into society, with academia leading discussions, and the industry implementing responsible practices.Ultimately, the trajectory of humanoid robot development depends on market demand and the ability to meet real-world needs.In summary,both academia and industry have vital roles to play, with academia focusing on research, ethics, and long-term planning, while industry drives practical applications and scalability.Effective collaboration is key to unlocking the potential of humanoid robots and advanced technologies.
B. Research Ideas of Humanoid Robots
Humanoid robots are currently advancing in two main directions: One aims for a human-like appearance, while the other emphasizes functional similarity, encompassing humanlike movements, dexterity, and environmental perception.These approaches stem from different research perspectives and have shaped the field in distinct ways [48], [49].
The first approach focuses on replicating human appearance and functions externally.Through assimilating insights from human behavior, robots acquire the capacity to execute tasks in a manner akin to humans, harnessing sophisticated sensors and adept control programs [40], [42], [50], [51].Examples of notable research outcomes include Honda’s ASIMO robot [40], Beijing Institute of Technology’s BHR robot [50], the iCub robot developed by the Italian Institute of Technology [51], [52], and Boston Dynamics’ Atlas robot[42].These robots integrate artificial intelligence algorithms for initial self-learning and adaptability.Through redundant actuators, researchers creating humanoid robots with humanlike dexterity though controller design remains a challenge.Various mathematical algorithms have been proposed to control humanoid robots with highly redundant actuators, such as the zero moment point [53], capture point [54], [55], and central pattern generator algorithms [56] for achieving stable bipedal locomotion, as well as model-free reinforcement learning [57] and demonstration-based imitation learning algorithms [58] for diverse operations.While these approaches are still in the early stages of research, they hold promise in expanding the application range of humanoid robots.
The second approach delves into internally emulating core human mechanisms, resulting in intelligent robots with human-like internals.These robots simulate human traits such as visual cognition, decision-making, motor control, and musculoskeletal systems, aiming to establish empathy and deep cooperation with human partners [48].Research teams globally, including the USA, EU, Japan, South Korea, Canada,Australia, and China, have made significant strides in humanoid mechanisms, brain-inspired algorithms, neuromorphic chips, and musculoskeletal systems, achieving notable progress [59]-[61].
C. Research Subjects and Hotspots of Humanoid Robots
A search for “humanoid robots” in the Web of Science database using the time frame 1900-2022 yielded a total of 17 488 relevant papers.After filtering out irrelevant papers, the top 10 000 papers were ranked and analyzed for relevance using citespace, a specialized software for literature analysis.Fig.2 presents the current research themes and hotspots in the field of humanoid robots, with the results visualized as follows:
1)Co-Citation Analysis: Examining the distribution of authors in the literature, it is evident that early research on humanoid robots was pioneered by authors like K.Hirai, S.Kajita, and Q.Huang.In recent years, an increasing number of researchers, including prominent figures like S.Kuindersma and K.Kaneko, have joined the field and contributed to humanoid robot research.
2)Country and Institution Analysis: The analysis of authorcountry clusters reveals that the major research countries of humanoid robots are Japan, USA, and China.Key research institutions include the University of Tokyo, Waseda University, and Osaka University in Japan, Beijing Institute of Technology and Tsinghua University in China, and the Massachusetts Institute of Technology in USA.Other countries,such as Italy, Germany, France, the UK, and South Korea,have also made significant contributions to related research.
3)Cluster Analysis of Keyword: Analyzing the distribution of keywords in the papers, it is observed that research on humanoid robots primarily focuses on topics such as humanrobot interaction, human motion, path planning, imitation learning, biped walking, virtual reality, and hand posture recognition.
As shown in Fig.3, the number of papers on humanoid robotics demonstrated a steady increase from 1998 to 2011,reflecting a growing interest in the field.Since 2012, there has been a substantial surge in research, driven by technological advancements, the robotics competition, media coverage,practical applications, increased funding, collaboration, and academic interest.This surge led to a peak of over 1000 papers published annually from 2014 to 2022, indicating a persistent and enthusiastic trend in humanoid robot research over the past decade.
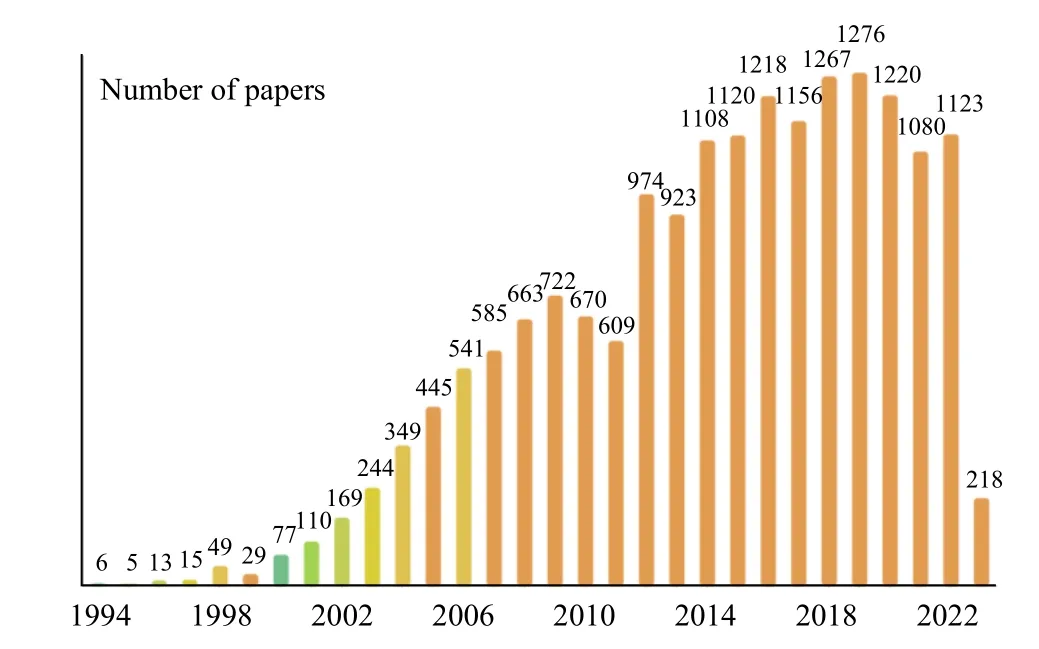
Fig.3.The number of papers varies with each year.
D. Research Status of Humanoid Robots
Various countries have designed unique humanoid robots,each characterized by specific attributes and abilities, as illustrated in Fig.4.Table I provides a comprehensive overview of the progress and achievements in humanoid robot research by highlighting a selection of representative models.This table summarizes the advancements made in humanoid robots, particularly in areas such as movement, dexterity, interaction, and cognitive capabilities.
1)Humanoid Robots in Japan: Research on humanoid robots in Japan has predominantly focused on morphological simulation, with a specific emphasis on developing intricate and lifelike bionic robots tailored towards domestic and service-oriented applications [62].
Waseda University pioneered humanoid robot development with the groundbreaking WABOT series in 1976, achieving the first successful implementation of bipedal walking technology [63], [64].Over nearly five decades, Waseda University has sustained its leadership in advancing humanoid robotics.Collaborating with the National Institute of advanced industrial science and technology (AIST), the university’s contributions extended to the WABIAN series, enriching the domains of bipedal locomotion, control algorithms, and the intricate interplay between humans and robots [65].The AIST catalyzed significant progress in the realm of humanoid robotics, exemplified by the HRP line of robots [66].These platforms have illuminated diverse avenues of research encompassing humanoid locomotion, manipulation, and humanrobot interaction.Notably, the HRP-4 robot emerged as a striking testament to its ability to mimic human movements and manipulations [67].Subsequent iterations like the HRP-4C [68] optimized motor skills and expressions, while the HRP-5P [69] fortified stability against external forces.Additionally, the University of Tokyo’s Kenshiro humanoid robot demonstrated enhanced flexibility through an increased number of degrees of freedom [70]-[72].
Aside from research institutions, notable companies such as Honda, Toyota, and Sony have made significant contributions to humanoid robot research [35], [73]-[75].Honda’s partner robot (PR) achieved high-speed running capabilities through a unique design inspired by horse hooves.Sony developed entertaining humanoid robots, namely the SDR and QRIO,capable of singing, dancing, kicking a ball, and engaging in human-computer interaction [36].ASIMO, Honda’s renowned robot introduced in 2000, represents a reduction in size from the P2 humanoid walking robot while further enhancing walking and working capabilities.The improved version of ASIMO, developed in 2011, demonstrated the ability to walk on uneven surfaces, perform voice recognition, avoid static and moving obstacles, and exhibit multi-finger coordination[40], [76]-[80].Another noteworthy creation is the Schaft robot, developed in 2013, which exhibits the capacity to navigate uneven terrains and climb ladders, among other functions [62].
2)Humanoid Robots in the USA: In the USA, humanoid robotics research has primarily focused on understanding the mechanisms and functional simulation of the human brain,resulting in significant advancements in operating robots within complex environments.These achievements lay a solid foundation for potential real-world applications.

Fig.4.Research status of humanoid robots.
One notable institution, the MIT LegLab, adopted a progressive approach from the 1980s to the 1990s, culminating in the development of a series of highly capable mobile humanoid robots based on pneumatic telescopic leg mechanisms.These robots demonstrated remarkable locomotor capabilities due to the high power density of pneumatic mechanisms.For instance, the planar biped and the 3D biped not only exhibited fast running speeds but also performed cartwheels while in motion [31]-[34].The MIT Artificial Intelligence Laboratory contributed to the field with the Kogo robot, which emulated human-like learning processes to perform specific tasks.Additionally, Willow Garage’s two-armed service robot, PR2 (personal robot 2), showcased the ability to execute complex operations such as folding clothes and towels, opening doors, and autonomously locating its own charging socket [81].NASA developed the humanoid two-armed robot, Robonaut 2, which replaced astronauts during tests on the international space station, carrying out repetitive tasks in the hazardous space environment [82]-[86].Agility robotics is a leading company known for innovative humanoid robots, like their flagship“Cassie” humanoid robot and “Digit” humanoid robot, which sets new standards in versatile robotic mobility [87], [88].Rethink Robotics introduced the Baxter robot, a new generation of flexible two-armed industrial robots.Baxter robots are known for their cost-effectiveness, versatility, and ease of programming, making them suitable for a wide range of applications [89]-[92].Sarcos developed the Sarcos humanoid robot capable of maintaining balance and achieving movement despite disturbances during walking and standing.Boston dynamics, a renowned leader in humanoid robotics, has developed a variety of dynamic and highly mobile robots.The original humanoid robot, Petman, was designed to perform actions such as walking, push-ups, and overcoming obstacles [45].Building upon Petman, the Atlas robot underwent comprehensive improvements in walking and manipulation capabilities,enabling it to operate in unknown environments [41]-[43].The institute for human and machine cognition (IHMC) stands as a prominent research institute specializing in humanoid robot walking motion control.In 2019, IHMC designed and developed the M2V2 humanoid robot specifically for urban environments [93], [94].Tesla unveiled its latest humanoid robot, Optimus Prime, in 2022, envisioning its deployment in thousands of households.Optimus Prime demonstrates humanlike dexterity, steady walking, the ability to bend over, wave to audiences, and perform simple dance moves [46], [95].Additionally, Nadia, jointly designed and built by IHMC and Boardwalk Robotics, represents the next generation of humanoid robots.It possesses a wide range of motion, high speed,and great strength.With experience gained from working with robots such as Boston Dynamics’ Atlas and NASA’s Valkyrie, Nadia aims to advance robotics and apply these technologies to practical real-world applications.Unlike Tesla’s Optimus Prime, Nadia employs a hybrid power system, combining electric and hydraulic power sources [96]-[98].
3)Humanoid Robots in Other Countries: In various countries, the research on humanoid robots has been influenced and inspired by the distinctive studies conducted in the USA and Japan, leading to further innovative research and development.
In France, Aldebaran Robotics has made significant contributions to humanoid robotics with the development of various humanoid robots, including ROMEO, Pepper, and NAO.The NAO robot, widely utilized in the academic field, has gained global recognition [127].ROMEO, primarily designed for personal care, possesses the ability to observe its surroundings and engage in conversations with humans [118]-[120].The Pepper robot is designed to interact with humans, specifically, recognizing emotions through human facial expressions and voices and adapting conversational patterns accordingly[115]-[117].The Flower Lab at Inria has developed POPPY,a low-cost humanoid robot manufactured using 3D printing technology.POPPY’s movements closely resemble those of a human [128], [129].Germany, specifically the Technical University of Munich, has developed the Johnny humanoid robot,primarily utilized for kinematic research, indoor environmental services, and fast walking, including navigating obstacles[136], [137].The German Aerospace Center (DLR) has developed the TORO humanoid robot, which emphasizes coordinated control of the robot’s arms and gait control for safe human-robot interaction [138], [139].Tobot, a software company, has created two robots capable of dancing to music.The iCub humanoid robot, developed by the Italian Institute of Technology, plays a significant role in human cognition and artificial intelligence research, aimed to deepen our understanding of human cognitive processes [51], [52], [106],[140].Additionally, the Italian Engineering School has developed the flexible humanoid robot COMAN, primarily for studying the planning and control of natural walking and jumping movements [108], [109], [141], [142].The University of Brussels in Belgium has developed the Lucy humanoid robot, equipped with pneumatic artificial muscles [143].PAL in Spain has introduced the REEM-C humanoid robot, featuring walking, visual recognition, and human-robot interaction capabilities [113], [114].Engineered Arts, a British Technology Company, has created a humanoid robot, renowned for its realistic expressions and advanced interaction capabilities,earning it the reputation of being one of the most human-like robots [112].In South Korea, the KHR series of humanoid robots developed by KAIST enjoys significant recognition[144], [145].The HUBO KHR-3 robot can walk at a speed of 1.4 km/h with a straight-knee gait and run at 3.6 km/h [146].The DRC-HUBO robot employs an innovative wheel-leg combination model to enhance stability in uncertain environments [39], [121], [147].

TABLE I PERFORMANCE PARAMETERS OF SOME TYPICAL HUMANOID ROBOTS
4)Humanoid Robots in China: China has made significant progress in the field of humanoid robots, with various universities and research institutes leading the way.Some notable achievements include the development of the “Forerunner” in 2000 by the National University of Defence Technology, and the “BHR” humanoid robot in 2002 by the Beijing Institute of Technology, which showcased stable walking on unknown terrain and complex movements [148].Other institutions, like the Harbin Institute of Technology [149] and Tsinghua University [125], [150], also contributed with successful bipedal walking robots and unique transmission structures for stablewalking.Peking University’s “Runbo” humanoid robot employed an elastic mechanism for smooth walking and agile task performance [151], [152].The Beijing Institute of Technology’s five generations of the BHR series robots are considered representative humanoid robots in China, with the“GOROBOT 5” achieving breakthroughs in motion control and autonomous response based on high-speed vision [122].Zhejiang University excelled in high-speed vision perception,dexterous motion planning, and precise balance control, even developing humanoid robots for table tennis and football[123], [124].Chinese companies have advanced in humanoid robot development, with notable examples including Ubtech’s Alpha robot in 2015, the Walker humanoid service robot in 2021, and Xiaomi’s CyberOne in 2022, China’s first full-size bionic humanoid robot with advanced features [48], [49].These advancements in China’s humanoid robotics reflect the country’s expertise and dedication to exploring the potential applications of humanoid robots across various domains.

TABLE II ONTOLOGICAL STRUCTURE AND MODULES OF SOME TYPICAL HUMANOID ROBOTS
III.ONTOLOGICAL STRUCTURE & MODULES
This section summarizes the ontology structure and mechanism of humanoid robots, including a discussion of the various modules involved.
A. Mechanical Design
The mechanical design of humanoid robots is of utmost significance, drawing inspiration from the intricate structure and subtle motions of the human body [153]-[155].This design serves a dual role, facilitating practical interactions while also providing a platform for scholarly exploration into bipedal locomotion and associated research pursuits [20], [69], [156].Comprehensive comparisons of specifications in Tables I and II offer insights into various humanoid robots, facilitating understanding of their capabilities.Parameters such as degrees of freedom, weight, size, power supply, and sensors shed light on strengths and limitations, aiding researchers and developers.This analysis reveals trends and progress in humanoid robotics, supporting further research.The implementation of techniques such as laser cutting, CNC machining, and 3D printing contributes to the construction of intricate mechanical frameworks, wherein the latter emerges as a transformative innovation, offering an array of cost-effective prospects for crafting lightweight and structurally economical frameworks [69], [155], [157], [158].A notable trajectory in this domain involves the impetus of commercial enterprises towards the development of lightweight and open platform humanoid robots, exemplified by noteworthy entities such as DARwIn-OP [126], Open-HRP [130], [133], [134], Aldebaran Nao [127], iCub [52], [106], and NimbRo-OP [130],[133].
B. Classification of Humanoid Robots
Within the domain of humanoid robotics, a categorization predicated on scale delineates differences between adult-sized and child-sized iterations.Adult-sized humanoid robots, typically exceeding one meter in height and equipped with bipedal locomotion, embody a diverse array of attributes encompassing advanced control systems, sophisticated planning capabilities, intricate mechatronics, comprehensive AI sensing technologies, optimal mobility and working range, and refined human-robot interaction capabilities.Conversely, child-sized humanoid robots, epitomized by models such as NAO and Alpha, materialize as tabletop entities tailored for specific scales and applications, characterized by a compact form factor conducive to tabletop interactions.Table III delves into an analytical examination of the characteristics and application scenarios associated with these two distinct categories of humanoid robots.It offers an insightful breakdown of the key differentiating factors, shedding light on the specific strengths and development prospects of adult-sized and child-sizedhumanoid robots.Additionally, Fig.5 visually supplements this examination by illustrating system complexity, energy consumption, functionality, interaction capability, load capacity, and the volume-to-mass ratio, enabling an comprehensive and intuitive comparison of performance attributes across varying sizes.The boundaries of these areas in the diagram are based on the performance statistics of various types of humanoid robots of different sizes derived from a comprehensive review of existing research in the field.By elucidating these factors, researchers and developers can gain a deeper understanding of the performance distinctions between the two sizes of humanoid robots, enabling informed decisionmaking in accordance with their specific requirements and objectives.

TABLE III CLASSIFICATION OF HUMANOID ROBOTS
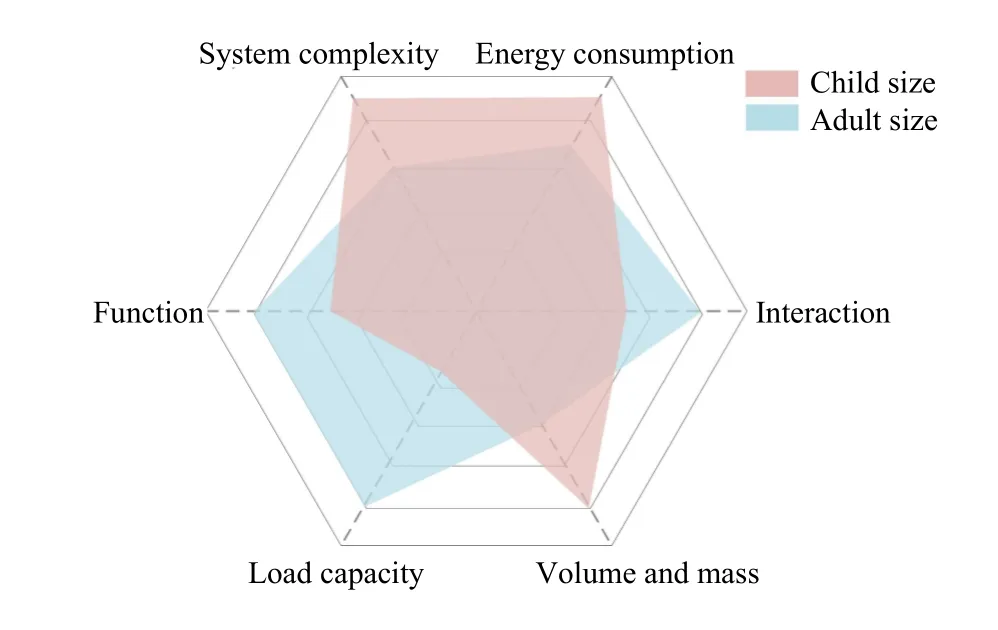
Fig.5.Comparison of Child-size and Adult-size humanoid robots.
C. Kinematics, Dynamics and Biomechanics
The intricate complexities intrinsic to humanoid robots,characterized by their elevated order, intricate interconnections, and non-linear attributes, present challenges when it comes to precisely addressing the intricacies of kinematics and dynamics.Furthermore, the absence of fixed reference points and the potential for collisions during their motion introduce additional layers of complexity [25], [26].Classical methodologies, exemplified by the venerable Lagrange and Newton-Euler equations, find themselves constrained by the intricate tapestry that envelops these robotic systems.Analytical solutions for inverse kinematics, reliant on constraints to approximate solutions, often yield disparities between the intended trajectory and the realized trajectory.To navigate these intricacies, scholars are delving into alternative avenues,including neural networks, genetic algorithms, and fuzzy logic, with a focus on robustness and computational efficiency [159]-[162].This infusion of novel paradigms, in harmony with the continuous evolution of computing capabilities,presents pragmatic pathways for effectively addressing the intricate challenges inherent in multi-degree-of-freedom humanoid robots.
D. Processing Units
Humanoid robots encompass not only their mechanical structure but also incorporate one or multiple processing units.The selection of electronic components for humanoid robots is generally driven by the specific application requirements, such as autonomy, remote operation, the intended tasks of the robot, and the associated cost considerations.In the present landscape, a wide array of processing units are available for integration into humanoid robots.Over the past decade,advancements in technology have introduced smaller processing units, prompting many humanoid robot developers to opt for diverse and compact processing units, particularly mini PCs, especially in competitive settings [133], [163].
Furthermore, alongside custom-made master boards, commercial master boards are also widely utilized in humanoid robots.Raspberry PI boards [164], ARM-based boards [165],compatible Arduino boards [166], and off-board computing controls [43] are commonly employed in the development of humanoid robots.The information presented in Tables I and II indicates a general trend where an increase in the number of degrees of freedom of a robot corresponds to an increase in its size.Consequently, more powerful processing units and higher power requirements are necessary, leading to elevated costs in the overall system.
IV.CONTROL, DRIVE & DECISION MAKING
Compared to human capabilities, there’s a noticeable gap in agility and autonomy in humanoid robots [167], which this section addresses by discussing control, actuation, and learning methods to achieve desired behaviors.
A. Control of Humanoid Robots
1)Categorization of Humanoid Robot Control Methods:This section offers a thorough overview of humanoid robot control method categorization, complemented by Table IV,which summarizes the classification and distinct characteristics of current control methods.
a)Traditional control methods: The foundation of humanoid robot control rests on traditional control methods,exemplified by the zero moment point (ZMP)-based method[168] and the dynamic model-based method [169].The ZMPbased approach excels in generating stable gait patterns but faces limitations related to walking speed and robustness.Conversely, the dynamic model-based method offers excellent stability and lower computational complexity, albeit with applicability often confined to idealized flat terrain for modeling and control.
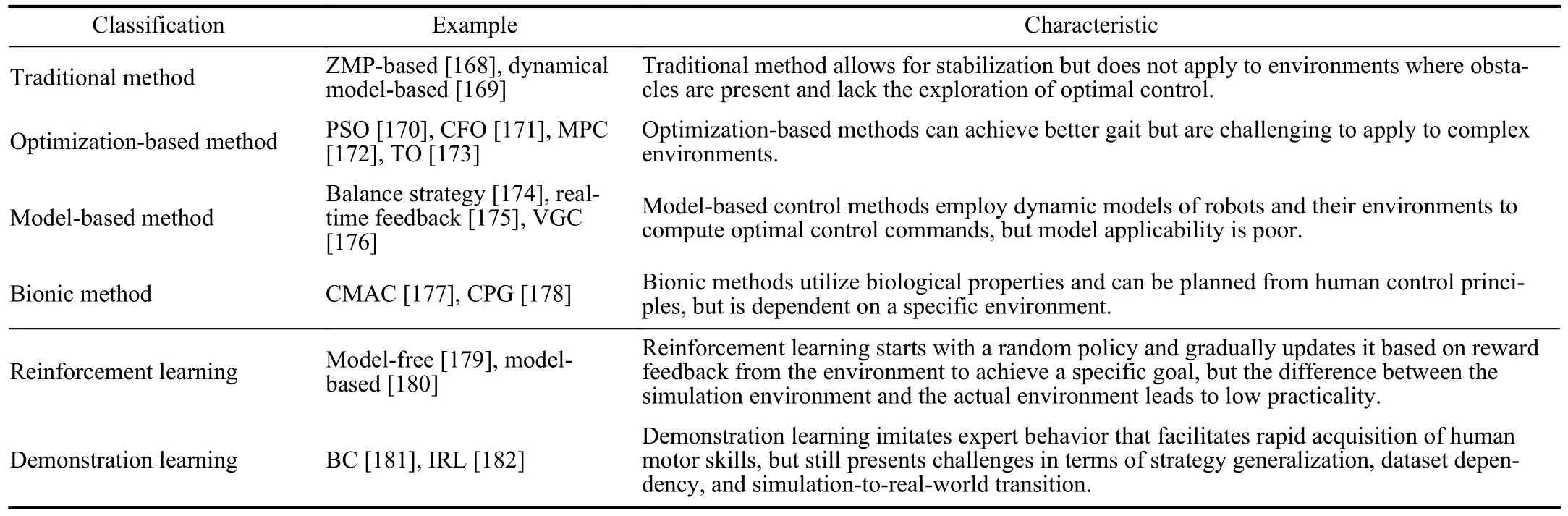
TABLE IV CONTROL AND LEARNING OF HUMANOID ROBOTS
b)Optimization-based control methods: Optimization-based locomotion control methods have revolutionized humanoid robots, allowing precise control of a wide range of movements.By framing challenges as real-time optimization, these methods include techniques like particle swarm optimization(PSO) [170], central force optimization (CFO) [171], model predictive control (MPC) [172], and trajectory optimization(TO) [173].Whole-body control (WBC) blends upper and lower body tasks, prioritizing task execution while respecting constraints.Recent MPC advancements enhance real-time adaptability and efficiency.Contact planning, terrain adaptability, and balancing strategies optimize interaction with the environment.Distributed control streamlines complex problems, integrating sensors and actuators throughout the robot.Online perception and task hierarchies enhance adaptability,while machine learning refines control in dynamic environments.In conclusion, recent advances in optimization-based motion control for humanoid robots have significantly enhanced their capabilities in terms of balance, adaptability,versatility, and real-time decision-making.These developments pave the way for humanoid robots to perform a broader range of tasks in various environments.
c)Model-based control methods: Model-based control methods employ dynamic models of robots and their environments to compute optimal control commands, ensuring precise and stable movements.The balance strategy method based on human body data [174] enables adaptive strategies to cope with diverse disturbances.The real-time feedback method [175] stabilizes walking while dynamically adjusting gait in real-time, though it may have limitations in transferability.The virtual gravity compensation (VGC) method [176]facilitates stable walking on uneven terrain and in the presence of disturbances.
d)Bionic control methods: Bionic control introduces two significant components: the cerebellum-model-articulation controller (CMAC) [177] and the central pattern generator(CPG) [178].CMAC distinguishes itself through robustness in handling noise and interference.Conversely, CPG exhibits broad applicability but presents challenges related to parameter tuning.
e)Learning-based control methods: The advent of machine learning and deep reinforcement learning, exemplified by techniques like deep reinforcement learning (DRL), has revolutionized humanoid robot control.These methods empower robots to acquire complex motor skills, adapt to uncertain environments, and enhance locomotion capabilities by learning from data and experience.
2)Advancements in Humanoid Robot Control Domains:
The present state of research in control has yielded substantial progress across various domains.This section provides a comprehensive overview of these advancements:
a)Locomotion control: Achieving bipedal locomotion stands as a fundamental challenge in humanoid robotics.Humanoid robots emphasize legged movements, particularly bipedal gait, closely mirroring human walking patterns [50],[183], [184].They aim for omnidirectional walking adaptable to various speeds and terrains, seeking versatile, dynamic, and dependable locomotion [42], [185], [186].Controlling omnidirectional walking poses challenges in complex scenarios and harsh environments, and necessitates thorough kinematic analysis and robust walking engine development [20].Bipedal walking in humanoid robots includes open-loop and closedloop walking engines [131], making it a prominent research area [187].Recent research explores simplified algorithms based on robust regression for trajectory tangent estimation and temporal similarity and smoothness optimization.Additionally, MPC, initially designed for autonomous driving, has found application in humanoid robot gait control, regulating centroid position and posture [188], [189].Researchers also explore diverse locomotion strategies, spanning activities such as walking, running, stair climbing, and traversing rough terrains.
b)Balance and stability control: Minimal energy consumption during ideal motion planning in humanoid robot walking necessitates meticulous consideration of motion balance and stability [187], [190].Research efforts focus on enhancing balance control through advanced algorithms that integrate various sensory inputs, including inertial measurement units(IMUs) and vision.Various stability criteria apply, including the position of the robot’s center of mass (COM) and center of pressure (COP) within a convex region of foot support, ensuring stability [183], [191].Quasi-dynamic walking approximates dynamic walking while simplifying dynamics, relying on the concept of zero moment points (ZMP) [184], [192],[193].ZMP balances computational complexity and stable motion, enhancing energy-efficient locomotion [22].Progress has been made in dynamic walking, inspired by passive dynamic walking (PDW), optimizing equilibrium stability through probabilistic reinforcement learning and other approaches.
c)Behavior control: Behavioral control poses a pivotal challenge in humanoid robot control, encompassing autonomous, semi-autonomous, and remote control methods [194].Researchers explore diverse artificial intelligence approaches within autonomous and semi-autonomous behavioral control systems [195].Complex tasks demand intelligent decision systems, with key research directions including path planning,footprint planning, and navigation for autonomous and semiautonomous humanoid robots [196].Navigating complex environments involves addressing self-collision detection,path planning, and obstacle avoidance [195].Humanoid robots, leveraging their bipedal nature, can overcome obstacles and navigate stairs and ladders in rugged terrains [24],[40], [67], [76].However, achieving a suitable solution in dynamic environments remains an ongoing pursuit.In the case of remotely controlled robots, complex tasks often demand intricate decision-making systems, leading to remote control approaches.
In addition to these areas, current research developments in other domains are described below: Real-time control in humanoid robots has significantly improved, enabling efficient execution of complex tasks.Control algorithms rapidly process sensory information and adapt to changing environments.Humanoid robots maintain balance even in challenging situations, such as being pushed or on uneven terrain.State-of-the-art control algorithms utilize predictive control strategies to ensure dynamic stability [172], [197], [198].Research has enhanced humanoid robots’ adaptability to unforeseen circumstances.Learning-based approaches enable robots to recover from disturbances and adapt to varying conditions, increasing their versatility [199]-[201].Control research has expanded to include more complex manipulation tasks [202].Integration of advanced sensors, including lidar,cameras, and tactile sensors, has heightened the perception and decision-making capabilities of humanoid robots [203].Control algorithms effectively utilize these sensors for tasks such as object recognition and navigation [204], [205].Control research extends its purview to enhancing human-robot interaction (HRI), encompassing the development of control algorithms that facilitate natural and secure interactions between robots and humans [206]-[208].This includes shared workspaces, assistive device scenarios, and collaborative tasks.
B. Actuators of Humanoid Robots
Humanoid robots are meticulously designed to replicate the intricate structure of the human body, allowing their actuators to emulate human muscles and joints, thereby enabling lifelike movements [209].Actuators in humanoid robots are categorized into various types, each with distinct pros and cons that influence the robot’s performance, efficiency, and design intricacies.
Electric actuators, encompassing both brushed and brushless DC motors, impart precise control, robust torque, and efficient energy utilization within compact dimensions.Their ability to recapture energy during deceleration is noteworthy.Yet, their potential heftiness necessitates sophisticated control strategies for versatile motion [121].Pneumatic actuators,exemplified by muscular mechanisms, imbue the robot with lightweight and adaptable motion, characterized by heightened force-to-weight ratios.However, their reliance on a continuous supply of compressed air incurs a trade-off in energy efficiency [165].Hydraulic actuators excel in demanding tasks and dynamic maneuvers, surpassing specific pneumatic counterparts in terms of efficiency.Notwithstanding their prowess,hydraulic actuators exhibit dimensions that can be substantial,necessitate hydraulic fluid, and involve intricate control paradigms [121], [210].Shape memory alloys (SMAs) introduce an avenue for lightweight and noiseless actuation, albeit with restricted force and response time capabilities, thereby necessitating intermittent cooling intervals.Cable-driven actuators facilitate expansive and agile motion, albeit entailing intricate kinematics and considerations regarding friction.Compliant actuators, typified by series elastic actuators(SEAs), ensure safety and energy storage attributes, despite potentially incurring minor trade-offs in accuracy and efficiency when juxtaposed with rigid alternatives [154].
Selecting actuators hinges on specific application, performance requisites, weight constraints, safety concerns, and desired complexity level.Designers often navigate trade-offs to achieve an optimal equilibrium between factors like precision, force, efficiency and adaptability [164], [211].
C. Learning of Humanoid Robots
Humanoid robots strive to imitate human thinking and behavior.They learn from their surroundings, autonomously perform various tasks, and adapt to different environments,whether planned or unpredictable [212]-[214].For a comprehensive overview, Table IV summarizes the classification and distinct characteristics of current learning methods for humanoid robots.
1)Reinforcement Learning(RL): RL is a decision-making paradigm that models problems as a Markov decision processes (MDP).In RL, the agent initially employs a random policy and iteratively updates it based on reward feedback from the environment to achieve specific goals [215], [216].Traditional RL methods, such as Q-learning [217], [218] and policy gradients [53], have been successfully applied to gait control in humanoid robots.Furthermore, the advent of DRL,which combines the decision-making capabilities of RL with the perceptual capabilities of deep learning, has significantly expanded the application of RL in robotics [219].
RL can be classified into two types: Model-based and model-free, depending on whether the state transition probabilities and rewards are known.Model-free RL methods optimize policies through iterative interactions with the environment, learning through trial and error [220].Two major types of model-free RL algorithms, namely value-based and policybased, have been employed in various studies [179],[221]-[223].Model-based RL methods [180], [224] learn to simulate the environment using models and receive feedback.By utilizing learned environments, exploration and policy search can be guided, resulting in lower sample requirements and higher efficiency [224].The model-free approach enables agents to directly learn from robot experience, but necessitates re-exploration when the task or environment changes.On the other hand, the model-based approach requires less exploration and exhibits strong generalization capabilities, but the acquisition and learning of the model itself is challenging.Consequently, some researchers strive to combine these two methods to complement each other [225]-[227].
However, conducting RL solely through trial and error in the real environment is not only perilous but also inefficient.Transfer learning from simulation to the real world introduces challenges in the sim-to-real transfer [228].
2)Demonstration Learning: Demonstration learning is a prevalent method in humanoid robotics for swift acquisition of human skills [229]-[231].This approach involves emulating expert behavior through demonstration data to learn tasks efficiently.In contrast to trial-and-error RL, learning from demonstration resembles supervised learning, employing samples to expedite learning, minimize exploration errors, and enhance agent safety [58].Guided by demonstrations, agents avoid stagnation and achieve faster convergence.Furthermore,demonstration learning imparts robots with insights into human intentions and behaviors, amplifying their interaction capabilities with humans [232]-[234].
Demonstration learning involves two primary methods:behavior cloning (BC) and inverse reinforcement learning(IRL) [235]-[237].BC derives policies directly from provided datasets, suited for deterministic tasks.Techniques like the Gaussian mixture model (GMM), hidden Markov model(HMM) [238], [239], and dynamic movement primitive(DMP) [240] are widely used for trajectory modeling.However, BC is constrained to replicating simple tasks and faces difficulties with untrained tasks [181], [241], [242].IRL learns reward functions from expert demonstrations and employs RL to find optimal policies.The reward function derived through inverse reinforcement learning exhibits greater adaptability to different task environments compared to the policy itself.It encompasses linear programming IRL[243]-[245], apprentice learning based on maximum marginal formalization [182], [246]-[248], maximum entropy IRL[249]-[255] and relative entropy IRL [256] based on probabilistic model formalization, and generative adversarial imitation learning (GAIL) inspired by generative adversarial networks (GANs) [257], [258].GAIL directly learns policies from expert trajectories without explicit reward functions[259]-[261].While IRL have been explored, substantial task or robot model changes may necessitate relearning, presenting implementation challenges.
Simpler demonstration learning falls short for complex tasks, as it requires an extensive dataset covering the entire task’s state space.This often leads to limited agent adaptability, especially for new tasks not present in the training data.Additionally, creating a flawless demonstration dataset is costly.To tackle these issues, a combination of demonstration learning and reinforcement learning has been proposed to enhance agent adaptation and generalization [262], [263].However, further research is needed to improve policy extension and generalization for intricate tasks.While current research has targeted specific aspects of humanoid robots,comprehensive exploration of the cooperative behaviors of complete humanoid robots is crucial [264], [265].It is noteworthy that while simulation advancements are evident, ensuring secure transition from simulation to the real world remains a challenge.
In conclusion, demonstration learning is pivotal in humanoid robotics for swift skill acquisition, safer operation, and enhanced human interaction.Behavior cloning and inverse reinforcement learning are prevalent approaches.While behavior cloning suits deterministic tasks, it struggles with intricate or new tasks.Inverse reinforcement learning overcomes these limitations by learning rewards and optimizing policies.Challenges persist in policy generalization, dataset reliance, and simulation-to-real-world transition.Future research should target these challenges, boost agent adaptability, and explore complete humanoid robot cooperation.
V.PERCEPTION & INTERACTION
The perception and interaction capabilities of humanoid robots are explored in this section.It discusses the sensory systems, perception algorithms, and interaction modalities utilized by humanoid robots to understand and engage with environments.
A. Sensors and Perception of Humanoid Robots
Sensors play a crucial role in enabling robots to perceive and interact with the external world.Effective fusion and utilization of sensor information serve as the foundation for sensor-based control and are prerequisites for humanoid robots to possess human-like sensing capabilities [266]-[269].The development of high-performance sensors is essential for enabling humanoid robots to understand and adapt to complex environments while operating with precision and flexibility.
1)Visual Perception: Robot vision research is a distinct discipline due to its significance and complexity.Visual perception information processing serves as a primary technical means for robots to perceive the external world and forms the basis for constructing interactive systems within the humanrobot environment.Vision algorithms are essential for extracting relevant information in real-time from acquired images[216], [254], [270], [271].The two commonly used vision systems in humanoid robots are monocular and stereo vision systems.While monocular vision systems do not provide precise environmental information [272], stereo vision systems allow the robot to measure the distance to a target, enabling tasks such as detection and obstacle avoidance [273]-[276].Robot vision still presents various unresolved challenges,including walking vision guidance [144], teleconferencing[277], and stereo vision [278].
2)Inertial Measurement Units(IMUs): Another essential sensor for humanoid robots, based on their bipedal nature, is the IMU.An IMU combines accelerometers, gyroscopes, and magnetometers to measure and report body-specific forces,angular velocities, and surrounding magnetic fields [279],[280].In humanoid robots, the IMU is typically attached to the upper body and measures angles and angular velocities relative to the ground in the sagittal and frontal planes.The data generated by the IMU is initially aligned using filtering algorithms and then utilized in the development of a walking engine [131].
3)Multi-Sensor Fusion Perception: While programming can be sufficient for humanoid robots working in known environments with specific accuracy requirements, equipping them with a variety of sensors becomes crucial when operating in unstructured and complex environments [211], [281].Humanoid robots utilize a range of sensors to support tasks such as path planning, mapping, and localization in uncertain and dynamic environments.Commonly used sensors include ultrasound [282], infrared [283], laser scanners [284], [285],camera-based vision [273], tactile sensors [286], [287], pressure sensors [288], and IMUs [279], [280].By fusing visual feedback signals with sensor signals such as position,force/torque, and haptics, precise control of the robot in unstructured and complex environments can be achieved[289], [290].
In conclusion, sensors serve as vital tools for robots to acquire information from the environment.Vision systems,including monocular and stereo vision, play a significant role in perceiving the external world.IMUs provide crucial data for understanding the robot’s orientation and motion.Moreover, the fusion of multiple sensor modalities allows humanoid robots to navigate and interact effectively in complex and unstructured environments, providing precise control and enabling tasks such as grasping and impedance control.Ongoing research in sensor development and fusion techniques is essential to further enhance the sensing capabilities of humanoid robots.
B. Human-Robot-Environment Interaction
Operating alongside humans, humanoid robots necessitate versatile interaction systems for effective engagement with their environment.Within the “human-robot-environment”framework, their capacity to perceive, comprehend, and respond to surroundings is pivotal [41], [61], [153].To establish natural interactions, they emulate human attributes through physical, cognitive, and perceptual means.Equipped with sensors and perception systems, robots gather and process data for appropriate responses.Advanced sensing technologies like vision systems and multi-sensor fusion ensure accurate environmental data [291], [292].Beyond physical interactions, humanoid robots communicate through gestures,expressions, voice, and mobile controls.Communication technologies, including mobile and wearable devices, provide adaptable control [11], [140], [293].This interaction framework underscores integration with the environment, striving for seamless interactions in diverse scenarios.It emphasizes adaptability, learning, and ongoing knowledge acquisition,enhancing versatility for effective navigation and responses in dynamic and unstructured surroundings [294].
In essence, the “human-robot-environment” system underscores the vital interaction and integration between humanoid robots, humans, and their surroundings.This encompasses physical, cognitive, and perceptual interactions, as well as adaptability and learning from the environment.Humanoid robots strive to be natural companions in areas such as service, healthcare, and social interaction by cultivating fluid and harmonious interactions.
VI.POTENTIAL APPLICATIONS
This section introduces potential applications of humanoid robots, illustrating their versatility and potential growth.Fig.6 provides an overview of the diverse fields where humanoid robots hold significant promise.

Fig.6.Potential applications of humanoid robots.
A. Competitions
Competitions evaluate humanoid robots through specific tasks based on defined criteria, providing comprehensive assessments of robotic abilities.The FIRA competition concentrates on essential aspects like robot stability, intricate motion planning, and human-robot interaction, highlighting the adaptability and resilience of robot hardware and software[295].The HuroCup league strives to craft versatile humanoid robots adept at various tasks within intricate settings, often likened to the “Olympics of robotics” [82], [296].In contrast,the RoboCup competition, categorized by humanoid body structures, presents robotics enthusiasts with soccer tournaments that pose unique challenges [297].The DARPA robotics challenge centers on robots executing tasks for disaster relief [298]-[300].In summary, competitions serve as a mechanism to facilitate the enhancement of technological prowess in humanoid robots across various real-world scenarios, ultimately propelling advancement and implementation.
B. Daily Life
Humanoid robots possess immense potential in the realm of living services, assuming a friendly role and fulfilling various tasks [29], [158], [301]-[303].This application of humanoid robots has the capability to establish a new industry and market, effectively addressing the challenges posed by an aging society and mitigating the scarcity of young labor in the realms of home services and healthcare [153], [304]-[306].Leveraging their human-like appearance, humanoid robots offer captivating and distinctive experiences within the entertainment and hospitality industry [57], [307], [308].They can serve as entertainers, performers, or guides in venues like theme parks, museums, and exhibitions, enhancing visitor experiences and automating routine tasks in the hospitality sector [309], [310].Moreover, humanoid robots play a transformative role in education, revolutionizing the learning process as interactive and adaptive teaching assistants.They engage students in interactive learning activities, facilitate personalized learning experiences, and provide tutoring support[311], [312].Additionally, humanoid robots find valuable applications in research settings, enabling the exploration of human behavior, cognition, and social interaction, thereby contributing to advancements in fields such as psychology,neuroscience, and social sciences [313].
C. Search and Rescue
The perilous and complex environments encountered during disaster situations present challenges for human involvement, highlighting the need for highly adaptable humanoid robots capable of substituting humans in rescue operations.Equipped with advanced mobility and sensing capabilities,humanoid robots can be deployed in search and rescue missions.They excel in accessing hazardous or inaccessible areas,navigating through debris, and locating and assisting survivors during natural disasters or emergencies.The humanoid form grants them the ability to manipulate objects and perform tasks in environments that prove arduous for traditional robots.Moreover, humanoid robots offer a stable and safe alternative to humans in operational tasks carried out in hazardous environments such as nuclear management, mining,and astronomical navigation [299].
D. Military and Exploration Missions
Humanoid robots hold tremendous potential in the realm of military applications, challenging the prevailing paradigm of warfare.They can replace humans in environments marked by radiation, dust, and toxicity, performing perilous tasks or offering assistance in search operations.Additionally, humanoid robots have the capacity to support exploration missions in space and extreme environments.Their adaptability, mobility, and human-like manipulation abilities render them wellsuited for aiding astronauts, conducting scientific experiments,and carrying out maintenance tasks in space stations or during planetary exploration missions [299].
E. Industrial and Manufacturing
Humanoid robots can be employed in industries for repetitive and labor-intensive tasks, improving productivity and efficiency.They can collaborate with humans, providing assistance in activities such as assembly, packaging, and material handling.Equipped with advanced sensors and dexterous manipulators, humanoid robots can also contribute to complex manufacturing operations, including precision assembly and quality control [82], [296].
F. Healthcare and Assistance
In the healthcare sector, humanoid robots assume a crucial role by providing valuable assistance to both patients and healthcare professionals.They can contribute to the medical rehabilitation of individuals with reduced mobility, playing a significant part in patient care [314], [315].Humanoid robots offer support to individuals with disabilities or the elderly in various activities of daily living, including medication reminders, mobility assistance, and personal care.Furthermore, they can assist healthcare providers in tasks such as patient monitoring, data collection, and telemedicine, leading to reduced workloads and improved healthcare delivery.Moreover, humanoid robots hold the potential to function as prostheses, aiding paralyzed patients in realizing their aspiration to walk [60], [194], [301].
The extensive array of potential applications outlined for humanoid robots underscores their versatility and capacity to contribute significantly across diverse fields.Continued research and development in humanoid robotics will further unlock their potential and pave the way for their integration into various industries, shaping the future of human-robot collaboration and interaction.
VII.FUTURE DEVELOPMENT TRENDS AND CHALLENGES
This section discusses the future trends and challenges,offering insights into research and development directions and identifying key obstacles for advancing the field.
A. New Challenges
In recent years, humanoid robotics has experienced significant growth, driven by increased interest, investments, and research advancements.Notable events, like Honda discontinuing ASIMO and Boston Dynamics changing ownership,underscore the dynamic nature of the field.While bipedal robots have made progress, their future is marked by uncertainty and complexity, with technical, financial, market, and societal challenges [316], [317].Summarizing these limiting factors is vital for guiding research, resource allocation, and decision-making [318].
1)Biological Mechanism: The understanding of the biological mechanism behind humanoidism remains limited, resulting in a lack of comprehensive knowledge and simplistic models.The complexity of the biological mechanism has yet to be fully revealed and understood.
2)Biological Structure: The mechanical structure of humanoid robots is designed and driven in a conventional manner, lacking the rationality and intricacy of the human body structure.There is a need to develop mechanical structures that more accurately replicate the sophistication and functionality of the human body.
3)Biological Material: The research on new biological materials with high performance is insufficient, and the existing findings have not been effectively applied and widely disseminated.Further exploration and utilization of advanced biological materials are necessary to enhance the capabilities and performance of humanoid robots.
4)Biological Control: The control and learning methods employed in humanoid robotics often rely on traditional approaches, with limited breakthroughs in the utilization of biological control methods such as neural control and myoelectric control.A deeper understanding of brain-like intelligence mechanisms and biological neuroscience is crucial to unlocking the full potential of humanoid robots.
5)Biological Energy: The research on biological energy conversion mechanisms in humanoid robots is not sufficiently profound, resulting in low energy utilization rates and high energy consumption.Further investigations into the efficient conversion and utilization of biological energy sources are essential to enhance the energy efficiency of humanoid robots.
6)Technological Complexity: Developing humanoid robots with natural movements demands advanced control and sensing technologies.Addressing challenges like stable bipedal motion and human-like interaction require progress in sensor tech, AI, and mechatronics, along with interdisciplinary collaboration.
7)Energy Efficiency: Bipedal robots’ high energy demands call for more efficient power systems and energy management.Advancements in battery tech hold potential to extend robot runtime, enabling broader applications.
8)Costs: High development and maintenance costs limit commercial adoption.Future research should optimize manufacturing, materials, and production for cost reduction and wider usage.
9)Application Domains: Despite potential applications in areas like emergency response and healthcare, robot performance, safety, and costs must align with specific needs.Collaborative research and industry partnerships are vital for broader adoption.
10)Machine Learning and AI: Advancing machine learning and AI is crucial for enhancing robot autonomy and adaptability.
11)Legal and Ethical Issues: As robots integrate into society, ethical and legal concerns arise.Future research should focus on regulations and ethics to ensure lawful and ethical robot use, necessitating interdisciplinary work and responsible advancement.
12)User Acceptance: Future developments should enhance robot appearance, movements, and communication to improve user acceptance and interaction.
13)Fault Tolerance and Safety: Ensuring robot stability and safety is critical.Collaborative efforts in technology and regulation are essential for reliable, safe robot deployment in various applications.
Table V provides a comprehensive overview of key technologies and challenges for the future progress of humanoid robots.Tackling these challenges necessitates interdisciplinary collaboration and advancements in areas like biology,materials science, control systems, and energy conversion.
B. Future Development Trends
Humanoid robotics research hinges on understanding biology and interdisciplinary collaboration.Challenges are surmountable through technology, cost-efficiency, and regulations.Innovations in materials, batteries, and AI will strengthen bipedal robots, enhancing energy efficiency and adaptability, with their future dependent on breakthroughs, costeffectiveness, and broader applications, yielding significant societal benefits.
1)Biological Mechanism: The profound study of human anatomy, physiology, and coordination provides invaluable insights into the fundamental principles governing human capabilities [319].This knowledge serves as the foundation for developing humanoid robots with enhanced functionality and lifelike characteristics.The field of biomimetic mechanisms has evolved from the macro level to the micro level,with ongoing biological research unraveling the intricate mechanisms that govern humanoid robots [320].Despite significant progress, the current intelligence exhibited by humanoid robots falls short of human capabilities [321].Hence, future research focuses on advancing brain-like intelligence technologies that emulate the human nervous system,aimed at replicating human-like cognitive behavior and intelligence through neural and cognitive-behavioral mechanisms.The ultimate goal is to equip humanoid robots with a range of human-like cognitive abilities, surpassing current intelligence levels [48], [49], [322].This pursuit integrates insights from biology, neuroscience, and robotics, unlocking the potential for advanced cognitive capabilities in humanoid robots, bringing them closer to the realm of human intelligence [14], [318],[323].
2)Biological Sensing and Perception: The future of humanoid robotics is set to undergo a profound transformation with the emergence of highly accurate and affordable sensors.These sensors will play a pivotal role in enabling advanced functionalities and capabilities within humanoid robots.By providing precise and reliable data from both the robot’s surroundings and its internal systems, these sensors will enhance perception, interaction, and decision-making processes.Their impact will extend across various domains,including human-robot collaboration, autonomous navigation,and intelligent manipulation tasks [216].Furthermore, the affordability of these sensors will foster widespread adoption,making humanoid robots more accessible and applicable in real-world scenarios.In summary, the development of accurate and cost-effective sensors holds immense promise in unlocking the full potential of humanoid robotics and shaping its future trajectory [268], [269].Intelligent sensing and perception form the cornerstone of human-robot, robot-robot, and robot-environment interactions, with key research directions encompassing multi-sensor information fusion, object perception, and recognition technologies [320].By harnessing the collective information from vision, hearing, touch, and other sensor modalities, robots can surpass human perceptual capabilities and adapt to complex and unstructured environments[211], [267], [288].Leveraging the strengths of multiple sensors through rationalized utilization, robots achieve a coherent interpretation and description of the observed environment.Object perception and recognition technologies offer efficient computation and accurate identification.The future of humanoid robot cognition and perception relies on advancements in sensor technology, artificial intelligence, and computational performance, driving the intelligent evolution of humanoid robots [324]-[326].

TABLE V KEY TECHNOLOGIES AND CHALLENGES OF HUMANOID ROBOTS
3)Biological Structure: Bionic structures in humanoid robots have evolved from rigid to integrated designs that combine rigidity and flexibility.This integration allows for more natural movements resembling humans, enhancing versatility and adaptability.By incorporating flexible elements, humanoid robots achieve a balance between stability and agility,enabling them to perform complex tasks efficiently.This progression signifies a significant advancement in humanoid robotics, as robots can now better emulate human behaviors and exhibit enhanced capabilities.
a)Architecture design: The architecture design of a humanoid robot is crucial as it defines the relationships and distribution of its components.It determines how information flows and how the robot’s processing and control system is structured.Achieving robot autonomy relies on careful architecture design, which is essential for reaching this goal.Addressing architectural aspects and providing guidance is highly valuable in theory and practice [69], [155], [157],[158].
b)Mechanical structural design: The mechanical design of a humanoid robot is important for its acceptance and humanlike appearance [153]-[155].Achieving intelligence, versatility, adaptability, and flexibility of movement is crucial.Humanoid robots are complex systems with multiple joints and degrees of freedom.The challenge is to optimize the structure while ensuring the desired functionality [69], [156],[308].
c)Advanced actuators: Traditional motor-driven methods are commonly used in humanoid robots, but they have limitations like restricted movement, limited load capacity, and heat generation.New hydraulic actuators have been explored to increase load capacity, but their high cost limits their widespread use.Artificial muscles that simulate human muscle-driven joint movements through airbag inflation and deflation are also being developed, but they have drawbacks like slow movement and low control accuracy.Advancing actuator technologies is crucial to improve load capacity and motion performance in humanoid robots [209].
4)Biological Materials: The future of humanoid robots involves the incorporation of biological materials, which will revolutionize their design and functionality.These materials imitate the structure and properties of biological systems,enabling robots to replicate human movements with enhanced precision and dexterity.The development of biomimetic materials has progressed from traditional approaches to encompass integrated structures, driving mechanisms, and material integration [269], [327], [328].By leveraging the principles and interactions observed in biological systems, these materials provide technical support for robots to achieve human-like behavioral functions while optimizing energy consumption,efficiency, and adaptability to the environment [325], [326],[329].The advancement of materials and the improvement of precision in manufacturing and component assembly are crucial considerations in the development process [154], [268].In-depth research and application of biomimetic materials and structures will pave the way for advancements in bio-mechanical-electrical integration technology, bionic control theory,and bionic drive systems, among other related fields [320],[330], [331].
5)Biological Control: The future of humanoid robot control is promising, driven by advances in control systems and AI.Collaboration between robotics engineers and control experts will be key to developing advanced algorithms that mimic human-like control mechanisms, enhancing robot capabilities.However, achieving the finesse and adaptability of human motion remains a formidable challenge.Currently,humanoid robots lack full autonomy and depend on preprogrammed instructions and external input [14].Achieving full autonomy requires significant advancements in AI and robotics.Future trends in humanoid robot control include a focus on key areas:
a)Optimization-based control: In the realm of optimizationbased locomotion control for humanoid robots, future trends include improving real-time adaptability, refining motion quality, and prioritizing multi-objective optimization.Adaptive terrain recognition, enhanced human-robot collaboration,and the integration of deep learning techniques will further shape this field.Interdisciplinary collaboration and real-world testing are expected to push the boundaries of adaptability and versatility in humanoid robotics [294], [332], [333].
b)Thinking and decision making: The evolution of biomimetic control is moving towards brain-like intelligence and fine-grained neuron-level control [14].Future trends in thinking and decision-making for humanoid robots involve advancements in cognitive computing, AI, natural language processing, and machine learning.These robots will become more autonomous and adept at interacting with humans.They’ll leverage big data and adhere to ethical considerations [220],[334].
c)Continuous learning: The future of learning control for humanoid robots holds promising developments.Deep reinforcement learning and the fusion of learning with optimization methods will enhance adaptability and performance in real-world scenarios [58], [214].Autonomous learning, advanced perception, and standardized evaluation metrics will drive progress.Humanoid robots will become more autonomous,versatile, and capable in various domains [322], [335].Future developments emphasize continuous learning, enabling robots to adapt and acquire new skills as they encounter different environments.
d)Remote control: Future trends in remote control for humanoid robots include improved teleoperation interfaces,reduced latency through advanced communication technologies, augmented reality integration, autonomous features, and standardization.These advancements will enhance the versatility and usability of humanoid robots in various applications[30].
e)Dynamic multi-objective optimization: Dynamic multiobjective optimization techniques are being explored to improve performance in various aspects [336].Achieving a balance between stability, speed, cost, safety, efficiency, and adaptability in dynamic, complex environments remains a challenge [337].Developing robust, real-time optimization algorithms will be essential for quick adaptation to environmental changes [338].
f)Autonomy: Advancements in autonomy will reduce the reliance on teleoperation, empowering robots to make independent decisions in unstructured environments.
g)Safety and ethics: Ensuring the safety and ethical use of humanoid robots, particularly in sensitive domains like healthcare and caregiving, remains a significant challenge.Control algorithms will need to incorporate safety measures to prevent accidents.
h)Human-like dexterity: Achieving human-level dexterity in robot hands is an ongoing challenge.Research will focus on improving control algorithms for fine-grained manipulation and complex tasks.
i)Energy efficiency: Enhancing energy efficiency is crucial for practical applications of humanoid robots.Future control algorithms will need to optimize energy consumption to extend operational durations.
j)Interdisciplinary collaboration: Collaboration with fields such as neuroscience and biomechanics will continue to inform humanoid robot control research, leading to more human-like control strategies.
k)Regulation and standardization: As humanoid robots become more prevalent, there will be a growing need for regulation and standardization in control systems to ensure safety and interoperability across different platforms.
The convergence of these challenges and trends will shape the next phase of developments in humanoid robot control,enabling robots to perform increasingly sophisticated tasks and interact more naturally with humans across diverse contexts.
6)Biological Energy: Advancements in energy conversion technologies are crucial towards addressing the high energy consumption and low energy utilization rate in humanoid robots [339].Research should focus on efficient mechanisms for converting and utilizing biological energy sources to power these robots.By studying biological energy conversion mechanisms and developing innovative solutions for energy storage and management, humanoid robot systems can become more energy-efficient.Currently, portable rechargeable battery packs, such as Li-PO batteries, are commonly used to power humanoid robots due to their high energy density, small size, and fast recharge cycles [340]-[342].In some cases, portable generators are also utilized [42].Optimizing energy consumption in humanoid robots is an active area of research, with efforts focused on parameter optimization and improving drive sources to make them smaller, lighter, and higher in capacity.The ideal energy source for humanoid robots should possess high energy density, high temperature resistance, corrosion resistance, renewability, and low cost.However, the current capacity of self-contained energy sources is limited, and the development of humanoid robots with multiple joints presents the challenge of improving the drive source.Solving these challenges will contribute to the advancement of humanoid robot development [343]-[346].
7)Software System: In recent years, there has been a focus on reducing software development efforts in humanoid robots through the introduction of robot operating system (ROS)packages specifically designed for humanoid robots and their actuators [279], [280].ROS is supported by useful simulators like the open-source Gazebo [347], [348].However, some developers may opt for alternative platforms for humanoid robot development [349]-[351].The software systems for humanoid robots encompass a wide range of programming languages and platforms.To streamline the development process, there is a pressing need for a comprehensive software development system and platform that includes a complete development library and cloud service toolbox for humanoid robotic systems.This would promote uniformity and accelerate the implementation process.Furthermore, the establishment of a cloud-based robotics system enables global information and knowledge sharing, resource sharing among humanoid robots, and efficient computation and data storage through cloud computing and storage functions.However, this emerging technology still requires further research and exploration to address issues such as resource allocation, system security, and reliable communication protocols [15].
8)Multi-Humanoid Robots System: Multi-robot systems have received significant research attention for facilitating collaboration and coordination among robots in shared environments [352].However, the complexities associated with humanoid robots and the nascent stage of their technologies have hindered in-depth investigation into multi-humanoid robot systems [353]-[356].This research gap calls for future exploration focused on task allocation, group decision making, and resource sharing within such systems, with the aim of realizing comprehensive and practical implementations [336].
9)Human-Robot Coexistence Safety: Safe human-robot coexistence in humanoid robots is crucial, requiring a focus on flexible mechanism design, control strategies, and safety methods [158], [292], [308], [357].Research includes active flexibility with multi-sensor fusion and adaptable control, and passive flexibility through mechanism design and bionic materials [27], [304], [358].The future of humanoid robotics is aimed towards natural human-robot interaction with advanced sensors, algorithms, and interfaces.Public perceptions and acceptance must be considered to shape their responsible deployment.These advancements will enable seamless integration of humanoid robots into human-centric environments while prioritizing safety.
10)Human-Robot Interaction System: The human-robot interaction system plays a vital role in enabling expressive communication and cognitive capabilities in humanoid robots[17], [359], [360].Current research focuses on enhancing multimodal information fusion techniques to broaden the interactive capabilities of robots, with particular emphasis on semantic analysis of speech [294], [310].Humanoid robots are actively developing interactive performance to address labor shortages and are progressing towards more flexible working models [140], [291], [361].As human-computer interaction technology advances, humanoid robots are becoming adaptable for a wide range of scenarios.Future research directions include the integration of advanced language models, such as OpenAI’s ChatGPT, and the exploration of large-scale robot operations, offering exciting prospects for enhancing humanrobot interactions [11], [15].
11)Interdisciplinary Research: The pursuit of humanoidism requires interdisciplinary research.Biologists study human anatomy and physiology, while materials scientists develop advanced materials for durable robot structures [362]-[365].Collaboration between robotics, AI, neuroscience, and other fields is crucial for bipedal robot advancement [366].Interdisciplinary collaboration can drive innovation in control algorithms, sensors, and cognition, enhancing robot performance[367].This approach aims to create more functional humanoid robots with accurate human emulation, benefiting various domains.
12)The Crucial Role of Academia: Academia plays a vital role in advancing humanoid robotics by focusing on foundational research, ethical considerations, and talent development [368]-[370].In research, academic institutions explore theoretical foundations, algorithms, and cognitive challenges,providing the theoretical basis for practical applications.Additionally, academia leads discussions on ethical frameworks and societal impacts, guiding ethical development.In talent development, academic institutions nurture experts through comprehensive education and interdisciplinary training.Academia’s organizational characteristics further support the field.Interdisciplinary collaboration fosters innovation, while long-term vision expands the field’s boundaries.Knowledge dissemination strengthens scholarly aspect through publications and presentations.Collaborating with the industry, academia enhances humanoid robotics by promoting initiatives like joint projects, internships, and technology transfer.Supporting startups, open-source platforms, and dedicated liaison offices accelerate research and development.Academia’s expertise in ethics informs responsible industry practices and regulations.

Fig.7.Key technologies of humanoid robots.
Therefore, the key technologies of the humanoid robot are summarized in Fig.7.In conclusion, the future of humanoid robotics lies in embracing multidisciplinary collaboration and pushing the boundaries of biological understanding.By integrating structure and biological materials, humanoid robots will exhibit enhanced functionality, expand their applications,and transform various aspects of human life.As research and technology progress, the potential for humanoid robots to become integral components of society grows, opening up exciting possibilities for their integration into everyday life.
VIII.CONCLUSION AND FUTURE WORK
This comprehensive review provides a thorough examination of the advancements and future prospects in humanoid robots.By investigating various research endeavors and key technologies, such as ontology structure, control and decisionmaking, perception and interaction, a comprehensive overview of the current research state is presented.The review identifies emerging challenges, including the need for a deeper understanding of biological motion mechanisms, improved structural design, enhanced material applications, advanced drive and control methods, and efficient energy utilization.Emphasizing the integration of bionics, brain-inspired intelligence, mechanics, and control, this review highlights a promising direction for the development of advanced humanoid robotic systems.The insights and guidance offered in this paper make it a valuable resource for researchers in the field of humanoid robotics, contributing to the advancement of humanoid robots that exhibit capabilities closer to those of humans.
 IEEE/CAA Journal of Automatica Sinica2024年2期
IEEE/CAA Journal of Automatica Sinica2024年2期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Reinforcement Learning in Process Industries:Review and Perspective
- Communication Resource-Efficient Vehicle Platooning Control With Various Spacing Policies
- Virtual Power Plants for Grid Resilience: A Concise Overview of Research and Applications
- Equilibrium Strategy of the Pursuit-Evasion Game in Three-Dimensional Space
- Robust Distributed Model Predictive Control for Formation Tracking of Nonholonomic Vehicles
- Stabilization With Prescribed Instant via Lyapunov Method