一种小型智能水上垃圾回收无人船的设计
2024-02-29 06:23朱耘志王永军
造船技术 2024年1期
朱耘志, 王永军, 郭 爽
(1.中国南水北调集团中线有限公司,北京 100053;2.武汉长江航道救助打捞局,湖北 武汉 430014)
0 引 言
“碳达峰”“碳中和”战略的提出和实施对国内水资源保护提出更高要求。水上垃圾是水资源的主要污染源。开发水上垃圾回收处理装置、减少水资源污染成为人们关注的重要课题[1-2]。
国内外采用多种形式的水上垃圾收集装置,但目前存在许多不足:①大多数装置需要人工操作,特别是垃圾分类处理需要耗费大量的人力、精力和财力;②可处理的垃圾种类较单一,大多数装置只能打捞水草和大型固态垃圾;③装置体型过大,自动化程度低,各类零件十分笨重,运行费用和维护成本高[3-4]。
水上垃圾收集装置处理垃圾能力有限,且无法对垃圾进行分类收集,影响垃圾回收处理效果。针对这一问题,设计一种基于单片机智能控制的小型智能水上垃圾回收无人船,功能如下:①立体水域垃圾分类回收;②湖泊水域液态垃圾高效处理;③船体智能调控与自动巡航。使用该型船可有效提高湖泊水域垃圾清理效率,并减少环保部门的人员和资金投入。
1 总体设计思路
固态垃圾收集模块通过传送带和滚轮收集漂浮于水面的固态可回收垃圾,例如塑料瓶等,并通过传送带的漏网可实现部分液态垃圾的收集,例如水藻等。液态垃圾收集模块通过耙吸头和离心泵收集液态垃圾,例如漂浮于水面的废油等,离心泵安放于船体左前舱室。垃圾处理模块通过固态垃圾收集舱收集固态垃圾,通过液态垃圾处理箱收集处理液态垃圾,收集装置放置于单体船中央连接部分。驱动模块通过船体两侧的明轮进行动力推进[5]。
该型船采用SolidWorks软件进行建模,其船体三维模型如图1所示。
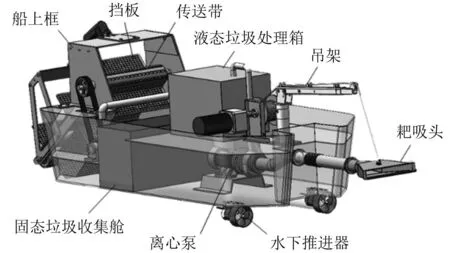
图1 船体三维模型
2 结构组成
2.1 船体结构设计
船体分为单体和双体。单体船设计简便,价格便宜,后期保养和维修成本低,但稳定性相对较低,船舱储存空间较小。该型船工作区域为城市内湖,湖面波浪能量相对较低,即对船体稳定性要求较低,且工作水域面积有限,水上垃圾量对于收集清理来说不需要具有较大储存空间。综合考虑选择单体船作为该型船船体,船体结构如图2所示。
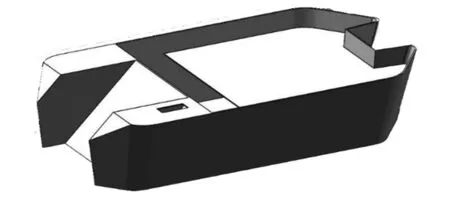
图2 船体结构
2.2 垃圾收集模块设计
2.2.1 固态垃圾收集模块设计
考虑湖面垃圾分布较为分散,为使船体结构简单轻便、工作效率高且制造成本低,该型船的固态垃圾收集方式选择传送式。固态垃圾收集模块由传输皮带、挡板、电机与传送带、电推杆和用于固定的船上框等组成,如图3所示。
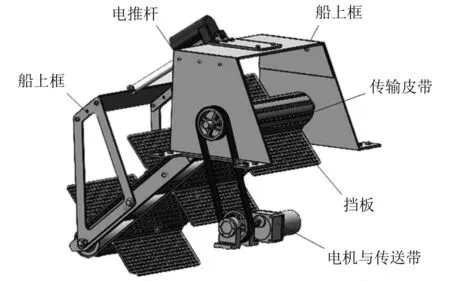
图3 固态垃圾收集模块
设计思路:根据垃圾性质设计传输皮带与挡板部分,并考虑船体尺寸和船身前后部分的质量平衡;根据传输皮带尺寸参数设计对应的电机与传送带,以保证传输皮带的传动能力;根据船体尺寸设计船上框,用于固定传输皮带并连接船体;设计电推杆,用于保证该模块的可调节性。
2.2.2 液态垃圾收集模块设计
液态垃圾收集模块由离心泵、绞缆机、吊架、耙吸头和渐扩管等组成,如图4所示。
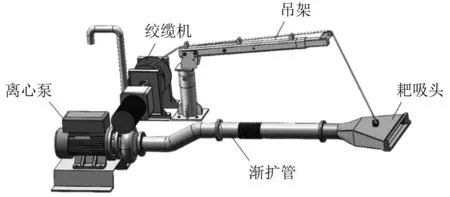
图4 液态垃圾收集模块
设计思路:根据垃圾性质设计耙吸头与渐扩管,并考虑船体尺寸和船身前后部分的质量平衡;根据耙吸头尺寸参数选择功率合适的离心泵,以保证耙吸头对液态垃圾的收集能力;根据耙吸头尺寸设计绞缆机和吊架,用于控制耙吸头幅度,以适应不同工况。
2.3 垃圾处理模块设计
2.3.1 固态垃圾处理模块设计
固态垃圾处理模块的主体部分为固态垃圾收集舱,如图5所示。

图5 固态垃圾收集舱
2.3.2 液态垃圾处理模块设计
液态垃圾处理模块的主体部分为液态垃圾处理箱,其结构如图6所示。
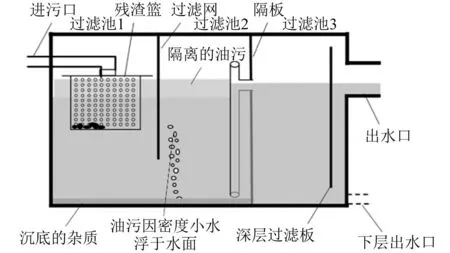
图6 液态垃圾处理箱结构
针对液态垃圾的回收处理通过三重过滤机制实现。具体流程如下:①液态垃圾在流入处理箱后进入过滤池1进行第一次过滤,较大体积垃圾被残渣篮拦截;②剩余垃圾在通过过滤网进行第二次过滤后进入过滤池2,油污因密度小于水,无法进入过滤池2底部开口的高效过滤管,绝大部分留至过滤池1和过滤池2;③剩余油污通过高效过滤管进行第三次过滤,流入过滤池3;④通过深层过滤板进行第四次过滤;⑤通过出水口排出净水。根据连通器原理,可在一定范围内调整出水口高度,以调整处理箱内的水位高度,实现对船体质量的调整。
在工业环境中常采用渗滤膜分离技术处理液态垃圾,例如现阶段运用较多的反渗透膜分离处理技术,其原理是运用人工制作的生物半滤膜作为材料,通过渗透压作用和生物半滤膜只能通过特定物质的特性将目标物质与水分离[6]。渗滤膜分离技术优点在于过滤效果好、材料无污染、操作方式简单和不需要过多的人为操作,但该技术不足之处在于所使用的材料大多以人工合成材料为主,造价成本相对较高,前期资金投入较大。
类似的处理技术几乎均用于污水处理厂等大型作业环境,对工作条件要求严格,在工作时需要较大压强,且成本较高。该型船具有良好的过滤功能,对工作条件要求低,在不降低处理效果的前提下实现便携化,成本较低,并可根据不同工作环境与船舶的要求进行个性化定制。
2.4 驱动模块设计
动力装置具有多种选择。除传统的柴油机、汽油机和蓄电池外,可利用太阳能和风能等绿色能源。柴油机具有功率大、安全性高、寿命长等优点和体积大、成本高、振动大等缺点;汽油机具有振动小、质量轻、体积小等优点和经济性差、安全性低等缺点;蓄电池具有结构简单、绿色环保等优点和功率小、续航里程短等缺点。太阳能和风能的利用需要搭配蓄电池,但易受环境影响[7]。
该型船船体较小,工作所需功率不大,动力部分初步选用蓄电池满足设计,暂不使用太阳能电池板和风力发电装置,若此后需要更新则可加入发电装置的设计。该型船不需要长时间在湖面上航行,可在蓄电池电荷量过低时选择返航进行充电,保证下一次航行的能源供给。水下推进器由螺旋桨、螺旋桨电机、安装底座和固定外壳等组成,如图7所示。
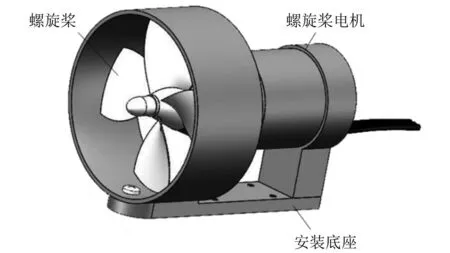
图7 水下推进器
3 控制系统设计
3.1 控制系统总体方案
基于单片机智能控制的控制系统由船载端控制系统和岸基监测控制平台(即上位机)组成。船载端控制系统以Arduino单片机为主控模块核心,外接环境信息采集单元、动力推进单元、作业运行与控制单元、通信与遥控单元和供电单元等,可实现船体速度调节、传动速度调节、运动自修正、自主导航与路径跟踪等多种功能[8]。岸基监测控制平台进行船岸之间的数据传输,实现对该型船工作运行的动态监测。控制系统的基本框架如图8所示,其中,GPS为全球定位系统。
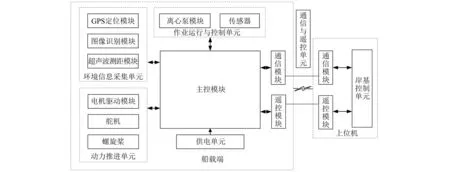
图8 控制系统的基本框架
3.2 船载端控制系统设计
基于单片机智能控制的垃圾分类回收船的船载端控制系统以Arduino单片机为主控核心,Arduino UNO是基于ATmega328P的Arduino开发版。Arduino单片机用于船体动力和航向的控制,在Arduino单片机输出脉冲宽度调制(Pulse Width Modulation,PWM)后集成多个算法进行处理,对电机的转速与舵机的转动角度进行控制,实现对船体运动的操控。
环境信息采集单元用于环境信息收集,包括水上垃圾位置和障碍物距离等,实现运动过程中的姿态自修正和航行中的避障。通过遥控模块可选择船体工作状态和工作模式,工作模式分为人工操作和自动巡航。人工操作模式通过岸基监测控制器对船体进行远程遥控控制;自动巡航模式是在岸基监测控制平台设定目标后,船体根据路径规划算法实现自动巡航。
系统软件流程如图9所示。
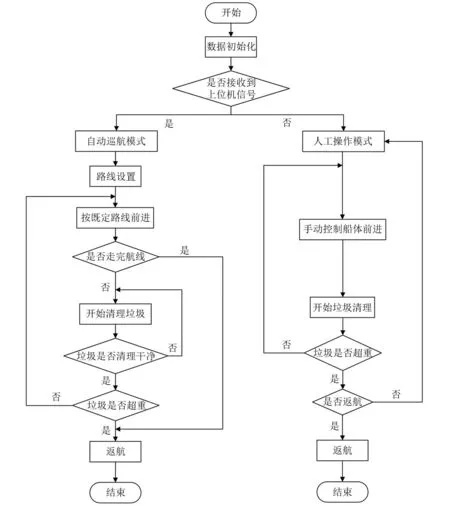
图9 系统软件流程
3.3 环境信息采集单元设计
3.3.1 GPS定位模块
经实际工况和使用场景检测,采用ATK-S1216F8-BD GPS/北斗模块作为GPS定位模块,该模块是一款高性能GPS/北斗双模定位模块,其特点包括采用S1216F8-BD模组,体积小巧,性能优异;可通过串口进行各种参数设置,并可保存于内部FLASH,使用方便;兼容3.3 V/5 V电平,方便链接各种单片机系统等。
3.3.2 图像识别模块
图像识别模块采用OpenMV4 H7 Plus摄像头。OpenMV摄像头是一款小巧、低功耗和低成本的电路板,可通过高级语言Python脚本进行控制,在机器视觉算法中处理复杂的输出[9]。OpenMV可在图像中同时检测多达16种颜色,且每种颜色均可具有任意数量的不同色块;可自动检测每个色块的位置、大小、中心和方向,在进行编程后可通过使用颜色跟踪功能实现对目标的跟踪,实现对水上垃圾目标进行检测的功能。
3.3.3 超声波测距模块
目前,超声波测距方法分为相位检测、幅值检测、渡越时间检测等3种,各有所长。相位检测法检测精度高,但测量范围较小,仅适用于高精度场所测量;幅值检测法通过检测返回的声波幅值测量距离,这就决定该方法易受到环境介质影响,测量精度有限;渡越时间检测法精度高且无物理接触,直接通过测量超声波在空气中的传播时间计算距离。该型船选择渡越时间检测法,超声波测距模块选用HC-SR04模块。
3.4 作业运行与控制单元设计
作业运行与控制单元由离心泵模块和在船体内工作的传感器等组成。通过控制离心泵功率确定液态垃圾处理箱的每分钟处理量,保证液态垃圾处理箱入口的进水量和出口的出水量保持平衡。通过读取传送带上的传感器得到的数值可判断垃圾量,并通过控制系统改变传送带功率,由电动推杆改变传送带倾角,根据垃圾量进行自适应调整。
4 结 语
该型船依靠船体和水下推进器实现水面航行;采用单体船结构,造价较低;后期保养和维修成本低;船体运动自由度高。通过协同智能控制系统的检测探头,可自动检测和收集水上垃圾,对中小型湖泊水域的固、液垃圾进行高效率的收集、分类和处理,并可通过自动巡航功能进行定期清理,大幅提升垃圾清理效率和人工操作时间。
猜你喜欢
纺织学报(2023年9期)2023-10-31
上海理工大学学报(2021年3期)2021-07-20
陶瓷学报(2021年1期)2021-04-13
陶瓷学报(2021年1期)2021-04-13
汉语世界(2020年1期)2020-02-14
小学科学(学生版)(2019年10期)2019-11-16
酒·饮料技术装备(2018年1期)2018-04-28
资源再生(2017年3期)2017-06-01
时代农机(2016年6期)2016-12-01
中国卫生(2015年6期)2015-11-08