
基于无人机的城市暴雨洪水危险性评价研究
2024-02-29 00:55唐大伟蒋志昊毛学谦
水利技术监督 2024年2期
唐大伟,蒋志昊,毛学谦
(1.江苏省水文水资源勘测局常州分局,江苏 常州 213000;2.江苏省水利科学研究院,江苏 南京 210000)
0 引言
城镇化导致城市高度集中,进而成为极端降水风险较高的地区。基于国内外注重对城市雨洪风险评估的现实,学者们提出了根据城市要素的构成,包括自然要素、结构要素和社会要素。建立具体的风险指标体系,能反映城市暴雨洪涝灾害严重程度及直接经济损失相关性。为更好地对城市暴雨洪水危险性进行评估和研究,此次研究创新地采用了无人机遥感技术中的倾斜摄影测试技术,能够获取高精度的遥感影像,进一步提高雨洪评估的精确度。在以提高城市雨洪评估精度的目的下,在获取高精度影像的基础上,运用城市三维建模技术,利用一种名为Smart3D的三维实景建模软件,输出高分辨率的实体建模。最后基于指标,运用暴雨洪水管理模型,对数据进行计算,期望借此实现风险评估。
1 城市雨洪评估模型建立
1.1 无人机倾斜摄影测量研究
此次研究基于无人机遥感倾斜摄影技术,采集高分辨率的影像,作为Smart3D软件的建模输入数据,提高了建模的精度,再以城市雨洪评估方法进行城市雨洪风险等级评估,从而形成一种新型、高精度的城市雨洪风险评估方法模型。
无人机(Unmanned Aerial Vehicle,UAV)是一种无人驾驶的航空器,采用无线遥控技术与计算机程序进行操纵[1]。无人机具有成本低、使用便捷等优点,广泛应用于各个行业。无人机技术中的倾斜摄影测量技术是新近发展的一种新型技术,与传统的航空摄影测量技术只能在垂直的角度拍摄影像,导致获取的影像不能真实呈现实物情况不同。倾斜摄影能够通过多台传感器,同时以不同的角度进行影像采集,另有先进的定位技术,不仅能够真实呈现城市地理环境的情况,还能够植入更加准确的地理信息和丰富的影像。
倾斜摄影中的多视影像是其关键技术,包含了2种数据:垂直影像数据,倾斜摄影数据[2]。针对在传统影像获取的过程中倾斜摄影数据处理不足的经典的空三角测量系统的一个缺点,采用联合平差进行弥补。倾斜摄影与垂直摄影的示意图,见图1。
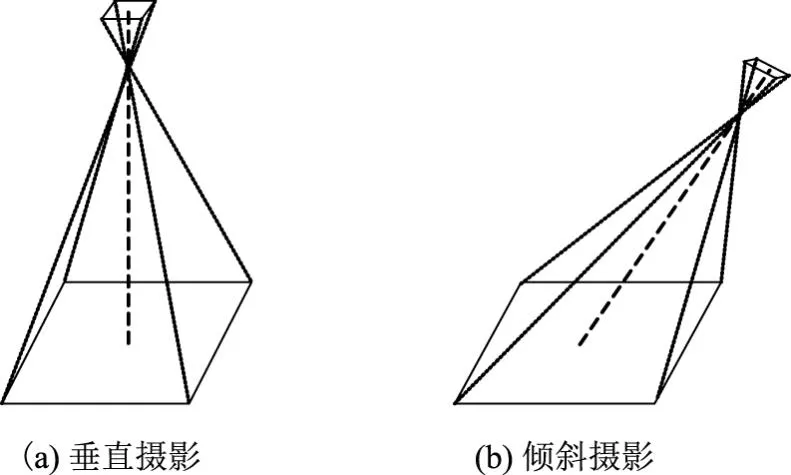
图1 垂直摄影与倾斜摄影示意图
在影像采集的过程中,由于存在着实体遮挡及变形的影响等因素,因此,结合导航定位定向系统(Position And Orientation System,POS)提供的外方位讯息,一次获得更加详细的位置信息,便于后续处理。通过金字塔匹配策略,综合获取良好的同名点匹配结果。
视觉重建技术是基于多视影像的、能够满足实用的精度要求。为获取多视影像的同名点坐标信息,开发了一套全新的效果良好、操作简单的系统。该技术的突破,主要体现在3个方面:①发展了更有效的特征描述算子,促使影像匹配具有更加良好的鲁棒性,能够提升空中三角系统的测量成功概率,减少影像拍摄的姿态和位置限制;②采用稀疏解算法[3],这是一种能够准确对影响进行处理的算法,名叫预处理共轭梯度法;③充分利用了中央处理器,也就是CPU的多核优点,能够快速处理巨量的影像。
数字表面模型,能够准确呈现被测地区的地理地形地貌的特征,是其中的关键技术之一。但有严重的遮挡、阴影,是倾斜摄影得到的影像的缺点之一。另一个缺点是,因影像间的尺寸误差大,直接导致无法获取高精度的数字表面模型。针对问题,根据空中三角系统测量得到的影像外方位元素,进行逐个像素的匹配。基于此,建立数字表面模型数据,这样处理建立的模型,具有高密度的优点。在此基础上,对影像信息及位置信息进行融合算法处理,最终获得分辨率类似的或者相同的数字表面模型。在多视影像技术中,另有一个关键技术,即真正射纠正,具有计算密集及数据密集的优点,能够处理大量离散分布的差异较大的地形地貌,以及数据量庞大的像方多角度影像[4]。
1.2 基于Smart3D技术的城市建模及雨洪风险评估方法
Smart3D Capture是一种并行软件系统,通过影像自动化建立三维模型。输入从不同角度拍摄的照片作为数据源,能够添加多种额外的辅助数据如照片位置信息、控制点、摄像头焦距,等等,能够在短时间内输出高分辨率的三角网格模型[5]。Smart3D具有简单、自动、迅速的优点,能够做到无人干预,简单地从连续的影像生成形象逼真的三维实景模型,降低了原来使用POS定位系统及激光点云扫描系统的成本,提高了效率,效果良好。
关于系统架构,Smart3D拥有主控台和引擎端两大模块。主控台是主要模块,用户主要通过这个模块进行交互,负责输入数据,通过接口作为定义,根据数据,进行任务的集中、拆分和分配操作,如初期设置任务、对后端提交任务、随时检测任务等,诸如此类的任务操作。引擎端,由于不执行处理影像,只负责将任务分解为子任务进行分配。引擎端不与用户进行交互,以优先级和提交的数据作为执行根据[6]。由于采用并行计算,在多个计算机上运行多个Smart3D,并将其关联起来,大大降低了运行和计算时间,提高了效率。Smart3D的计算模型如图2。

图2 Smart3D计算模型
在软件对模型的操作中,用户随时可以在主控台控制,对相应的用户界面进行任务操作和设置。另外,用户还能够监控引擎端助力数据的情况和任务进度,准确追踪,能够及时处理出现的问题和异常情况。
影像内部坐标系(Earth Centered Earth Fixed,ECEF)坐标系[7],是一个标准的全球笛卡尔坐标,是Smart3D软件中被用到的对影像的位置信息进行处理的基础,也被称为地心坐标系。ECEF结合了使用东北天坐标系(East North Up,ENU)进行三维项目重建,作为输入影像的空间坐标系。ENU具有3个坐标轴,将本地原点作为坐标点,分别指向东、北、天,见图3。

图3 东北天坐标系
三角网中的每个三角形的空间位置,都能够在Smart3D详细地自动地反映出来。运用独特的算法,舍掉不能构建成三角形的异常点,优化不合理的三角网,简化平坦稀疏的部分[8]。并且在其中选取了视角最好的影像作为模型纹理,见图4。

图4 Smart3D对位置信息处理示意图
利用Smart3D进行三维建模,对影像采集具有特殊的要求。在重叠度方面,视角至少有3个,连续影像之间的重叠程度有60%以上,拍摄物体周围的地段,可以环绕式拍摄30张以上影像。拍摄的设备,支持多种传统的设备,如手机,数码相机等高分辨率设备。整个项目,可以采用不同的影像精度、重叠度组成的多重数据源[9]。
Smart3D会自动创建为一个属性统一的影像组。Smart3D具有处理无定位数据的影像,能够从任意位置、旋转、比例生成三维模型,一般支持GPS、控制点2种类型的定位数据。用户能够在主控台的控制点模块,标出该影像的控制点坐标,输入控制点。除此之外,Smart3D具有兼容性和可扩展性,能够通过XML格式,导入任意定位信息,节约了大量的算法运行时间,提高了效率[10-11]。
城镇化对城市雨洪灾害具有很多影响。例如,建筑的大量建造,导致土地急剧变化,地面沉降,增加了城市雨洪的风险[12]。研究提出了几种雨洪风险评估方法:①基于指标,产生雨洪的致命因素和形成雨洪的诱导因素;②基于历史灾情,将历史灾情数据进行脆弱性分析和危险性分析;③基于情景模拟,包括风险识别、情景建模和风险评估;④运用遥感影像和GIS技术耦合,通过技术提取灾害数据影像,分析风险,评估风险等级。
暴雨洪水管理模型(Storm Water Management Model,SWMM)能够模拟计算各种设置条件和暴雨情况下洪水淹没的范围,即淹没深度,得到准确结果[13]。城市雨洪灾害中降雨是主要原因,为了计算不同时期的暴雨强度,根据暴雨强度公式,设降雨在空间上均匀分布,计算公式:
(1)
式中,0.25≤T≤10年,q—暴雨强度,l/s·hm2;T—暴雨重现期;t—降雨历时。将暴雨强度乘以降雨历时,获取整个研究区域的总降水量,最后均匀分布在整个区域中,同一单位暴雨强度的单位为mm/h,计算公式:
(2)
式中,T>10年。此次研究将排水作为主要因素,假设研究区域的排水管网分布均匀,还存在植被因素,获得最终的雨洪积水与排水量的差[14],然后乘以研究区域面积,减去植被面积的差,计算公式:
(3)
式中,W—雨洪积水量;Q—径流量即降水总量;V—排水量;S—研究区域面积;Vij—进行调整后的栅格单元值;Dij—被调整之前的栅格单元值;Hij—植被的高度;i—排水的行数;j—排水的列数[15]。
2 城市雨洪风险评估实验
2.1 实验设计
结合无人机遥感及3D城市建模,以此为基础,采用基于指标历史灾情和地理信息系统(Geographic Information System,GIS)技术耦合的城市雨洪风险评估方法。研究设计了一项情景模拟实验,验证该方法的有效性和可行性。
在进行城市雨洪风险评估之前,需要对某城市进行三维建模,复现该城市的地形地貌,便于风险预测。此次研究,采集的7603张影像为同一焦距、同一相机拍摄,分为5组任务项。在Smart3D软件系统中,输入的相关界面,添加在研究区域,均匀设置和建立了5个控制点,见表1。

表1 控制点信息
为更直观地进行风险评估,将淹没水位作为评估的主要关键指标。将此次研究的城市雨洪危险性程度划分为6个等级,见图5,w表示淹没水位。0m作为一级未被淹没区域,表示无风险,危险系数最低;0~0.2m作为二级淹没区域,表示存在一定的风险,影响出行;0.2~0.5m作为三级淹没区域,表示中等风险,对交通出行造成影响,影响居民正常生活;0.5~0.8m作为四级淹没区域,风险较高,严重影响居民正常生活,部分车辆无法出行;0.8~1.0m作为五级淹没区域,表示高风险,危险系数特高,车辆交通堵塞无法正常通行,有严重的财产损失;大于1.0m,作为6级淹没区域,风险很高,导致住宅区等淹没严重,交通完全无法正常运行,居民被困。
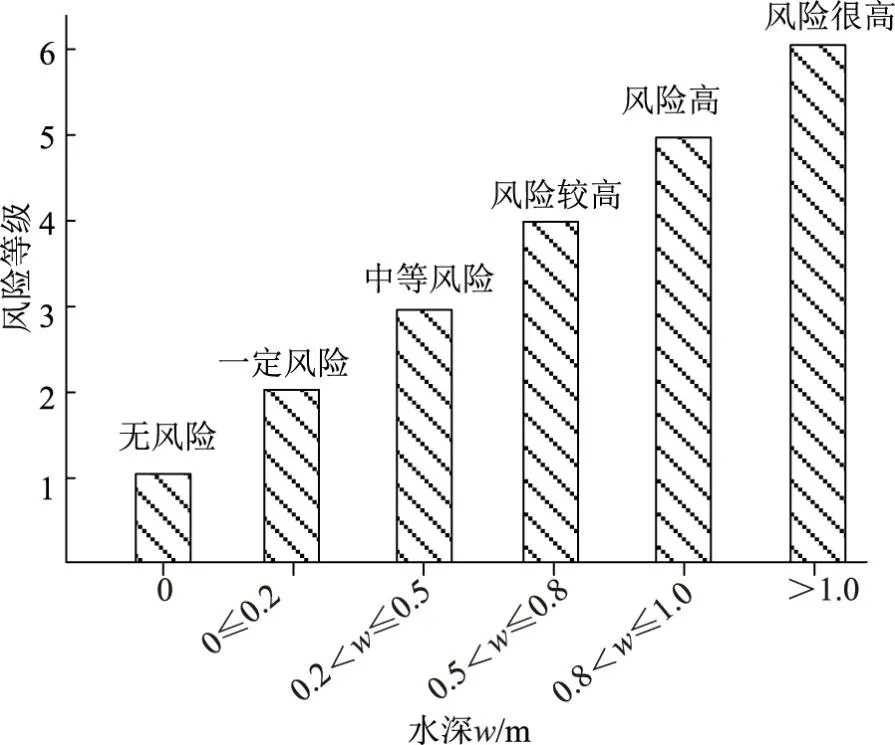
图5 风险等级划分
2.2 城市雨洪风险模型评价效果分析
通过Smart3D建模技术,将影像的整体精度误差进行对比。结果表明:计算出其均方根值(Root Mean Square,RMS),如图6。空三前的3D误差、水平误差及垂直误差的RMS分别为58.256,30.622,49.596。空三后的3D误差、水平误差及垂直误差的RMS分别为0.029,0.027,0.008。整体来看,影像的精度获得了很大地提升。
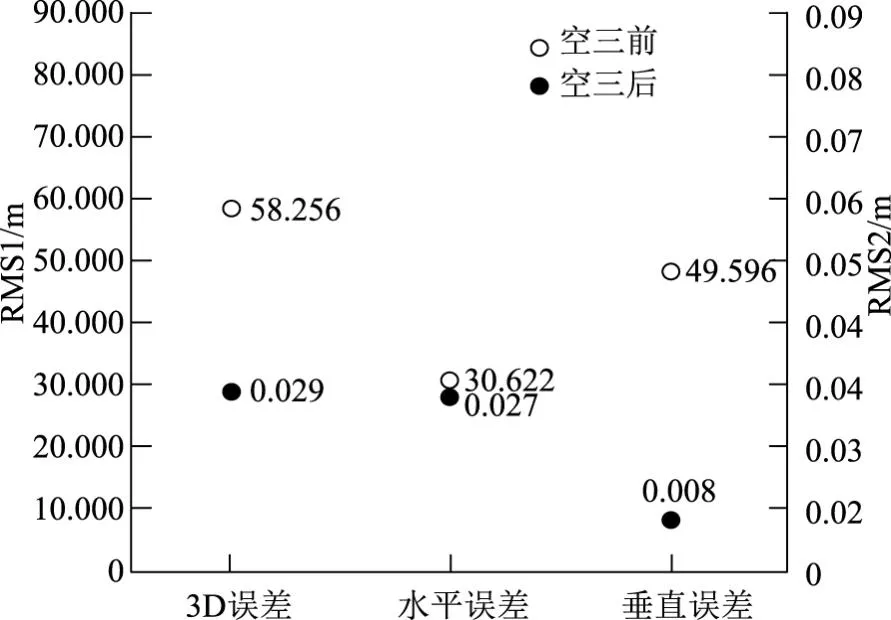
图6 Smart3D处理影像精度误差RMS情况
根据城市雨洪积水量公式,计算重现的不同时期下的研究区域的淹没情况,见表2。基于历史灾情,分别重现了暴雨强度,积水量,淹没水位和淹没面积。由表2可以看出,随着重现期的不断增加,其间,计量年份越来越大,各个指标也随之不断地上升。在20年的重现期中,除了部分的低洼水池,淹没深度大部分研究区域在0~0.2m之间,对居民的生活几乎没有影响。在100年的重现期中,暴雨强度达到了98.58mm/h,淹没水位达到了23.4112m,淹没面积与积水量分别达到了22338.28m2,10476.31m3。在500年的重现期中,各个指标都达到了很高的数字,如暴雨强度达到了115.98mm/h,淹没水位达到了23.6185m,淹没面积与积水量分别达到了31426.57m2,14235.98m3。

表2 不同重现期下的淹没情况
为直观展示在不同重现期下城市雨洪的情况,分别采用折线图与柱状统计图进行呈现。在图7中,随着重现期的增加,城市的积水量与淹没面积越来越大:20年时,积水量与淹没面积分别为10989.61m3,6716.25m2;500年时,积水量与淹没面积已经分别达到了31426.57m3,14235.98m2,分别相差了20436.96m3,7519.73m2。暴雨强度和淹没水位分别从20年的80.35mm/h,23.2451m,到500年的115.98mm/h,23.6185m,中间相差了35.63mm/h,0.3734m。

图7 不同重现期的城市雨洪情况
3 结论
为提高城市雨洪危险性评估的能力,研究采用了无人机倾斜摄影进行影像采集,并利用Smart3D,以采集的影像数据集为基础,建立城市三维模型,且采用雨洪风险评估方法进行风险等级评估,设计情景模拟实验进行验证。实验表明,对比空三前与空三后的影像精度:空三前3D、水平和垂直误差的RMS分别为58.256,30.622,49.569;空三后的为0.029,0.027,0.008。对比模型误差为0.0768。研究的雨洪风险评估整体误差为0.0131,对雨洪的风险等级划分更加细致分明。但考虑到研究只对均匀分布的理想状态下排水情况进行计算和研究,因此,未来还要综合考虑城市雨洪的多个因素和指标,进行综合、合理的风险评估。
猜你喜欢
环球时报(2022-08-10)2022-08-10
小猕猴学习画刊(2022年10期)2022-01-01
疯狂英语·初中天地(2021年8期)2021-11-20
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
成都信息工程大学学报(2017年5期)2018-01-23
水利规划与设计(2017年11期)2017-12-23
支点(2017年8期)2017-08-22
湖南水利水电(2015年1期)2015-02-27
