面向安全传输的低能耗无人机轨迹优化算法
2024-02-29 04:39吴嘉鑫孙一飞吴亚兰武继刚
计算机工程 2024年2期
吴嘉鑫,孙一飞,吴亚兰,武继刚
(广东工业大学计算机学院,广东 广州 510006)
0 引言
近年来,无人机(UAV)通信技术以其较低通信时延、较快传输速率的视距(LoS)链路[1]以及灵活的机动性受到学术界以及工业界的广泛青睐,根据用户节点的位置自适应调节悬停位置和飞行轨迹,以满足用户的传输需求,提高整体性能。无人机通信的1 个关键问题是无人机的机载电量十分有限,且其飞行及悬停时需要消耗自身很大一部分能量。在实际应用中,需要对无人机的飞行轨迹进行合理规划,以延长无人机的续航时间。
随着物联网技术的快速发展,物联网产业也愈发生机蓬勃。传感器作为物联网感知技术已经遍布现实生活中的多个应用场景,比如智能城市交通、智能农业水产等,均须部署大量的无线传感器作为数据节点,为上层决策系统采集原始数据,以进行数据统计、分析或模型训练。然而,无线传感器节点的电量大多是有限的,定期为传感器更换电源将产生大量劳动力开销,而对于部署在恶劣环境(如沙漠、丘陵等复杂地形)中的传感器,手动管理传感器电源显然不切合实际。传感器可以通过配备能量收集(EH)电路,收集环境中的太阳能、风能、射频(RF)信号[2]等对电源进行重新充能。相较于传统的风能和太阳能,基于RF 的能量收集受环境影响较小,可在无人机上部署无线传能(WPT)[2]电路,配合无人机的机动性以及灵活性,为能量受限的传感器节点进行充能。
在无人机访问数据传感器节点并收集数据的场景中,虽然在无线网络中使用无人机可以带来较快的传输速率,但其通信安全性也面临着巨大的挑战。由于无人机与地面节点之间采用LoS 通信链路,因此数据节点向无人机传输的数据容易被窃听节点监听。为保证数据节点与无人机之间的安全通信,引入中继节点协助,实现数据节点的安全容量[3-4],从物理层上保障数据的安全传输。无人机可通过靠近数据节点/中继节点,或远离窃听节点的方式,与数据节点建立更好的信道链路,或者通过为中继节点充能,增大中继节点传输功率的方式,提高安全容量。然而,这2 种方式都有可能额外增加无人机的能耗。因此,如何合理规划无人机向多个数据节点采集数据的飞行轨迹,且满足数据节点与无人机之间的安全通信是1 个重大挑战。
本文聚焦多数据节点安全通信的无人机网络场景,综合考虑无人机的能耗与安全通信问题,建立无人机安全通信模型以及能耗模型,并设计算法对无人机飞行轨迹进行优化,使得无人机能以较低能耗完成数据采集工作,同时又保证数据传输过程中的安全性。采用自组织映射(SOM)方法求解数据节点之间的最优访问次序,通过定制的粒子群算法逐个寻找无人机与每个数据节点通信的最优悬停点,使得无人机在满足数据节点安全通信的同时能耗最小。最后基于已有工作设计3 个基准方案与本文所提的算法进行对比,以验证算法的性能。
1 相关工作
已有工作大多考虑无人机的能耗优化以及地面节点的安全传输问题。
在能耗方面,文献[5]研究无人机的功率控制与能量收集的联合优化问题,采用马尔可夫决策过程对问题进行建模,并提出一种改进的强化学习算法最小化长期平均系统能量成本。文献[2]研究无人机辅助的无线供电传感器网络,其中,每个传感器节点在第1 个阶段从信号塔收集能量,并定期将感知到的数据发送到簇头;在第2 个阶段,无人机从簇头收集数据并将其交付到数据池中,从而避免数据远程传输以及多跳通信带来的能量损失。文献[6]将多架无人机作为基站管理D2D 用户的通信链路和功率分配,不定期地将无人机作为中继节点维护除通信范围以外的用户通信,使系统的吞吐量以及能量效率最大化。文献[7]中无人机向多个地面节点发送消息,通过交替联合优化无人机轨迹和功率,使得吞吐量最大化。文献[8]将配备有无线传能的无人机与移动边缘计算相结合,研究任务卸载及轨迹调度问题,考虑随机任务到达以及随机信道条件,建立1 个长期平均能效最小化问题,并尝试用李雅普诺夫优化解决该问题。文献[9]研究无人机轨迹、任务卸载以及CPU 控制的联合优化问题,以最小化无人机能耗。
在数据安全传输方面,鉴于无线频谱资源的稀缺性,文献[10]将无人机作为中继节点,研究Nakagami-m 信道下的安全传输方案。文献[11]采用无线信息与功率传输技术,在与能量收集设备通信的同时,为其提供能量供应。然而,该技术很容易受到窃听节点的监听。为满足接收节点的能量需求,同时实现与信息节点之间的保密通信,文献[11]利用能量信号的双重用途,将其作为有利的干扰或人工噪声来干扰窃听节点,从而实现信息安全传输。文献[12]研究大规模无人机无线网络中的安全传输问题,其中系统存在多架无人机以及多个合法节点和窃听节点。文献[13]考虑在窃听者移动情况下,利用无人机发射人工噪声对窃听信道实施干扰,保证系统安全容量最大。文献[14]结合D2D 通信以及无人机,研究无人机网络中隐蔽通信的模式选择和协同干扰问题,旨在提供强大的安全通信解决方案。
综上,已有工作大多将无人机作为基站或者中继节点,通过功率调控、飞行轨迹优化、信号塔辅助等方法,力求最小化无人机能耗。部分已有工作则以实现用户节点的数据安全传输作为目标,结合隐蔽通信、噪声干扰等技术,保障无人机辅助系统中的通信安全。这些工作均对无人机能耗及安全通信问题单独展开研究,而针对无人机通信网络中无人机的数据安全传输以及能耗联合优化问题,仍未发现深入的研究。
2 系统模型
假定在1 个a×a的区域内,随机分布有n1个数据节点,n2个被动窃听节点,以及1 架在高度为H的空中飞行旋翼无人机所组成的无人机无线通信系统。无人机安全通信网络架构如图1 所示。无人机将飞行至每个数据节点上空附近,并收集数据节点的数据,然而,这部分数据极有可能被窃听节点监听。为保证数据传输的安全性,假设存在n3个中继节点,以协助数据节点实现安全容量。

图1 无人机安全通信网络架构Fig.1 Architecture of UAV secure communication network
2.1 网络模型
令D、E、R 分别表示数据节点、窃听节点以及中继节点的集合,将这3 种类型的节点统称为地面节点,其可表示为N={1,2,…,i,…,N},N=n1+n2+n3。为简单起见,集合N中的前n1个节点属于集合D,节点序号i满足n1<i<n2则属于集合E,其余节点属于集合R。在地面节点之间采用D2D 通信方式。
本文通过建立三维笛卡尔坐标系描述地面节点以及无人机的位置。令ci=(xi,yi,0) ∈R3×1表示每个地面节点i的位置。假设无人机从起始点cI出发,遍历所有数据节点并收集数据,最后停在终点cF。设T表示无人机完成任务所需的总时间,令c0(t)=(x0(t),y0(t),H) ∈R3×1,0 ≤t≤T,其 中,c0(t) ∈C表 示无人机在t时刻的位置,C为无人机的飞行轨迹。
在任意时刻t,地面节点i与无人机之间距离的表示如下[9,15]:
假设无人机与地面节点之间不存在障碍阻隔,因此LoS 链路为无线信道的主要组成部分[9]。令hi(t)表示节点i与无人机在t时刻的信道增益,其遵循自由空间路径损耗模型,计算式如下[16]:
其中:β0为相对距离为1 m 时的信道增益;ϖ0为LoS链路的路径损耗指数。与空对地通信不同,地面节点i与j之间的信道增益计算式如下[16]:
其中:gij为地面节点i与j之间的小尺度衰落因子,其遵循 瑞利分布,即CN(0,1);β1和ϖ1分别为D2D 通信链路中的相对信道增益和路径损耗指数。
2.2 信道模型
为方便研究,假设每个数据节点附近都有1 个对应的中继节点协助其进行数据传输,以及1 个窃听节点对数据节点的数据传输进行监听。无人机网络安全通信信道模型如图2 所示。图2(b)所示为无人机经过其中1 个数据节点时节点之间的通信结构,其中U表示无人机,D表示数据节点,R表示中继节点,E表示窃听节点。

图2 无人机网络安全通信信道模型Fig.2 Channel model of secure communication in UAV network
为保障数据节点与无人机之间的安全通信,本文引入协作通信[17-18]以实现数据节点的安全容量,同时对数据节点、中继节点以及无人机的工作时隙进行划分,如图2(a)所示。假设无人机具备WPT 功能[19-20],可为中继节点提供电量,因此,中继节点还应具备能量收集功能。此外,假设中继节点为维持自身正常运转,将只使用收集到的能量协助数据节点进行数据转发。
假设整个工作时隙的长度为T,令ρ表示WPT时隙占比,即无人机进行无线传能的时间为ρT。在这个时间段,中继节点接收无人机传来的无线电波,将其转化为能量,以供后续协作通信阶段使用。令α表示协作通信划分因子,即协作通信的第1 个阶段占协作通信时隙(1-ρ)T的比例大小为α,第2 个阶段所占比例大小为(1-α)。在第1 个阶段,数据节点将其数据转发至无人机以及中继节点。在第2 个阶段,中继节点通过解码-转发的方式将数据发送给无人机,从而对窃听节点产生干扰,使得数据节点实现安全容量。
假设无人机与节点之间的通信带宽为W(单位为Hz)。令Pi表示数据节点i的传输功率,Pj表示中继节点j的传输功率,则中继节点j的瞬时传输速率表达式如下:
其中:σ2表示噪声功率。由于无人机在协作通信的2 个阶段均接收到数据,因此在t时刻的瞬时传输速率[21-22]如下:
2.3 能耗模型
由文献[9,15]可知,无人机的能量消耗集中在与地面节点的通信(本文中主要为无人机的数据接收能耗)、无线传能(无人机为中继节点充能)以及飞行器推进能耗(包括无人机飞行以及悬停能耗)。
在通信能耗方面,令Prec表示无人机接收数据时的功率。由图2(a)可知,无人机在 [ρT,T)时段均在接收数据,其接收时长为1-ρT。因此,无人机在数据节点i附近接收数据所消耗的能量可记为Ereci,计算式如下:
在无线传能方面,传统的线性EH 模型过于理想化。为更贴近实际,文献[9,24]提出并采用分段非线性EH 模型,记中继节点j可收集到的能量为,表示如下:
其中:PU为无人机进行WPT 时的功率;η为能量转化效率;Pth为能量收集电路的最大输出功率,即受限于EH 电路,中继节点最多只能收集到Pth·ρT能量。此时,无人机为消息节点i对应的中继节点j进行无线传能所消耗的能量,记为,可表示为:
中继节点j主要在协作通信的第2 个阶段消耗能量,其消耗的能量为:
在无人机飞行能耗方面,无人机推进所消耗的能量主要与无人机飞行速度VU相关。由文献[15]可知,无人机的推进功耗可近似建模为:
将VU=0 代入式(12)可得无人机悬停时的功耗,记为Ph,可表示为:
假设无人机遵循飞行-悬停-通信协议[15,25],即无人机飞行到数据节点i附近时,悬停并与数据节点进行通信,之后再前往下1 个数据节点i+1。令表示无人机在数据节点i附近的悬停时间,为无人机在数据节点i附近的悬停能耗,可计算为:
因此,无人机在每个数据节点i处的能耗表达式如下:
其中:ci∈C表示无人机从数据节点i-1 收集完数据后出发到下1 个数据节点i的飞行轨迹,令ci[0]表示无人机在数据节点i-1 处的悬停点,ci[ -1]则表示无人机飞行到数据节点i处的悬停点。至此,无人机的总能耗可表示为:
图1和表1示,CEACAM1在128例正常食管黏膜组织中高表达4例(3.13%),低表达12例(9.38%),无表达112例(87.5%)。CEACAM1在128例食管腺癌组织标本中有表达,其中高表达92例(71.8%),低表达30例(23.4%),无表达6例。2组比较差异有统计学意义,Z=13.36,P<0.001。
3 问题建模
3.1 问题定义
为保证数据节点到无人机之间的数据传输安全,无人机需要飞行到数据节点i,i∈D 附近,在中继节点协助下,使得安全容量不为0。若无人机飞得离数据节点太近,则可能消耗过多不必要的推进能耗;若无人机飞得离数据节点太远,则可能导致安全容量为0,数据节点的数据安全传输无法得到保障。因此,本文的主要目标是对于地面上的若干个数据节点,无人机需要找出1 条飞行访问轨迹C,其可以不经过数据节点正上方,但须保证数据节点到无人机之间的数据安全传输,同时无人机通过飞行轨迹C产生的能耗最小。至此,面向安全传输的低能耗无人机飞行轨迹优化问题表述如下:
其中:约束式(18)表示数据节点i,i∈D 与无人机之间的安全容量须不小于设定的阈值Smin;Hlb和Hub为无人机飞行高度的上下界;约束式(19)表示无人机在这个区间内的高度飞行;约束式(20)表示中继节点只使用收集到的能量进行消息转发;约束式(21)为无人机的最快飞行速度约束;约束式(22)表示无人机的飞行轨迹起始点以及终点,本文假设无人机飞行轨迹的起始点和终点一致;约束式(23)表示能量收集效率、WPT 时隙占比以及协作通信划分因子的取值范围。
定理1优化问题为非确定性多项式(NP)-难解问题。
证明本文将通过展示带邻域的旅行商问题(TSPN)是优化问题的1 个特例,从而证明问题的NP难解性。
具体地,TSPN 问题的描述:给定平面上的若干个邻域Ki⊆Rn,按照一定顺序Seq,在每个邻域内选取1 个点zi∈Ki,使得访问成本降低。考虑问题的1 个特例,即不考虑约束式(18)。在该特例中,每个数据节点i的周边代表1 个邻域Ki,周边的其中1 个点为zi,如何按一定的访问顺序,使得无人机经过数据节点周边,同时能耗最低,可将问题的这个特例映射到TSPN上。由于TSPN 是旅行商问题的泛化问题,因此已被证明为NP-难解问题[26]。本文优化问题的求解难度比TSPN 更高,故问题也是1个NP-难解问题。

表1 系统参数默认值设置 Table 1 Default value settings of system parameters
3.2 子问题划分
对于本文优化问题,可将其拆分为2 个子问题进行求解。首先,找到所有数据节点i之间最短的访问路径(即后续无人机访问数据节点的最优次序);其次,在每个数据节点i的邻域中找到使得无人机能耗最小的同时满足数据安全传输需求的无人机悬停点。具体地,可以将子问题P1 形式化描述如下:
其中:dii′表示节点i、i′之间的距离。式(21)和式(22)作为约束条件,其他约束条件表达式如下:
子问题P2 形式化描述如下:
s.t.约束式(9),约束式(18)~式(20),约束式(23)
其中:约束式(24)表示每个数据节点被到达且仅被到达1 次,同时每个数据节点被离开且仅被离开1 次;约束式(25)表示数据节点i、i′所在的边是否被最短访问路径选中;约束式(26)的作用为消除闭环的子环路。
4 算法设计
针对子问题P1,本文采用自组织映射方法得到数据节点的近似最短访问路径。对于子问题P2,本文设计定制的粒子群算法进行求解,记为CSHOP。由于子问题P2 为带约束优化问题,因此本文向子问题P2 的目标函数增加关于安全容量约束条件的惩罚项,使得算法在迭代过程中始终在可行域范围内寻优。子问题P2可修改为:
同时,引入动态惯性权重以自适应粒子的寻优能力,具体操作如下:
其中:wmax和wmin分别为惯性权重的最大及最小取值;τ为当前迭代次数;Γ为最大迭代次数。对于定制的粒子群算法CSHOP,本文主要求解无人机在数据节点i附近的最优悬停点ci[ -1]。假设此时距无人机从cI出发已经历t′时间,则无人机此刻的悬停点可表示为c0(t′)={x0(t′),y0(t′),H(t′)},需要对 每个维度的取值范围进行限定,以确定可行域范围。其中,无人机飞行高度(即z轴)取值范围由式(19)可知,为[Hlb,Hub]。无人机在水平面上x轴及y轴方向的取值范围则由3 个节点的位置决定,即:
其中:ci、cj、ck分别为数据节点、中继节点以及窃听节点的坐标。CSHOP 算法的形式化描述如算法1所示。

5 实验结果与分析
5.1 实验参数设置
文献[27-29]均采用仿真实验来模拟无人机的实际应用,以评估算法性能。该研究手段所得到的理论与实验成果对无人机的实际应用(如智慧农业场景中使用无人机收集农作物监测数据)仍有指导意义。本文仿照文献[27-29]的实验环境与参数设置方式进行仿真模拟实验,以验证所提算法的有效性。所有的数据节点随机分布在1 000 m×1 000 m的区域内,且每个数据节点对应1 个中继节点以及窃听节点。所有实验数据均为100 次重复随机实验的平均值,具体参数设置如表1 所示[9,16,30]。每次随机实验默认将笛卡尔坐标系中最左边的数据节点作为无人机的起始点,随后采用控制变量法评估本文所提算法在无人机能耗和安全容量方面的性能[6,28-29]。
对于定制的粒子群算法CSHOP,具体参数设置如表2 所示。在无人机能耗方面,参数设置如表3所示[15]。

表2 CSHOP 算法参数设置 Table 2 Parameters setting of CSHOP algorithm

表3 无人机相关参数设置 Table 3 Relate parameters setting for UAV
5.2 对比方案设置
由于大部分工作均只单独考虑无人机能耗优化或无人机网络中的数据安全传输问题,因此无法直接进行对比实验。为实现算法性能的公平对比,本文参照已 有工作[12,15-16]的算法 思想设计3 种基准方案进行对比。
1)基于文献[15]中无人机直接飞行到地面节点上方收集数据,本文设计基准方案BASE_D:无人机直接飞行到数据节点上空收集数据,调整高度使得能耗降低且数据节点与无人机之间的安全容量不小于设定的阈值。
2)基于文献[12,16],本文设计基准方案BASE_R:无人机直接飞行到中继节点上空进行数据收集,调整飞行高度,使得数据节点与无人机之间能够安全传输数据,且消耗的能量尽可能少。
3)为实现安全容量,无人机须尽量远离窃听节点,更不可直接悬停在窃听节点上方。因此,本文设计基准方案BASE_M:无人机直接飞到数据节点与中继节点的中心点,调整飞行高度,实现低能耗数据安全传输。
5.3 结果分析
当中继节点传输功率变化时的无人机总能耗对比如图3 所示,中继节点的传输功率从1.0 W 到3.5 W 逐渐增长。从图3 可以看出,PSOMA 算法在无人机能耗方面较BASE_D、BASE_M、BASE_R 这3 种基准方案分别平均降低7.48%、8.75%、11.78%。当传输功率为3.0 W 时,PSOMA 算法在降低无人机能耗方面表现最佳,相较于BASE_D、BASE_M、BASE_R 这3 种基准方案能耗平均降低8.28%、9.75%和13.03%。
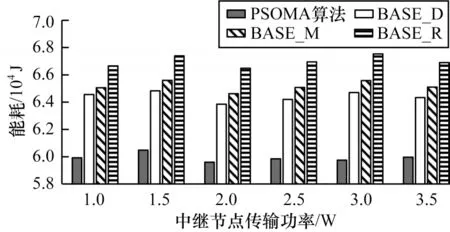
图3 当中继节点传输功率变化时的无人机总能耗对比Fig.3 Comparison of total energy consumption of UAV when relay node transmission power changes
当中继节点传输功率变化时的安全容量对比如图4 所示。随着中继节点传输功率增大,不同基准方案在安全容量方面呈现不同的变化规律。以基准方案BASE_D 为例,当中继节点传输功率小于2.0 W时,其安全容量呈上升趋势;当中继节点的传输功率大于2.0 W 时,其对应安全容量反而呈下降趋势。对于基准方案BASE_R,其安全容量值变化的转折点则出现在中继节点传输功率为3.0 W 左右,越靠近转折点,安全容量变化越慢。例如,当中继节点传输功率从1.0 W 增加到1.5 W 时,BASE_R 安全容量平均增加35.09%;当传输功率从2.5 W 增加到3.0 W 时,其安全容量平均只增加4.20%。由此可见,安全容量与中继节点传输功率之间为单峰或者多峰函数关系。而对于基准方案BASE_M,其安全容量则一直随着中继节点传输功率的增加呈上升趋势。PSOMA 算法在安全容量的变化过程中出现2 个峰值,分别为中继节点传输功率取值为2.0 W 和3.0 W,从其变化趋势来看,还有可能出现第3 个峰值。PSOMA 算法只要求安全容量满足设定的阈值。因此,在图4 中,PSOMA 算法对应的安全容量值比其他基准方案低。

图4 当中继节点传输功率变化时的安全容量对比Fig.4 Comparison of secure capacity when relay node transmission power changes
当EH 电路最大输出功率变化时无人机总能耗对比如图5 所示。从图5 可以看出,PSOMA 算法在无人机总能耗优化方面具有一定优势,其对应的无人机总能耗较BASE_D、BASE_M、BASE_R 分别平均减少7.25%、8.59%和11.57%。

图5 当EH 电路最大输出功率变化时的无人机总能耗对比Fig.5 Comparison of total energy consumption of UAV when the maximum output power of EH circuit varies
图6 所示为当Pth变化时,针对数据节点与无人机之间的安全容量,PSOMA 算法与BASE_D、BASE_M、BASE_R 这3 种基准方案的性能对比。由式(9)可知,Pth为分段非线性函数,中继节点最多能用于协助数据节点转发数据的能量为Pth·ρT。由式(11)可知,当中继节点传输数据所需的能量>Pth·ρT,j∈R 时,中继节点则须降低传输功率,以满足协作通信的数据传输需求。由图4 可以看出,数据节点与无人机之间的安全容量受中继节点传输功率影响呈多峰函数关系。从图6 可以看出,3 种基准方案对应的安全容量值均存在2 个波峰,基本出现在当Pth=0.6 W 以及Pth=1.0 W~1.2 W 之间。对于PSOMA算法,当Pth小于1.2 W 时,其对应安全容量值呈下降趋势,当Pth大于1.2 W 时,安全容量值呈上升趋势。

图6 当EH 电路最大输出功率变化时的安全容量对比Fig.6 Comparison of secure capacity when the maximum output power of EH circuit varies
图7 所示为安全容量的阈值Smin变化对无人机总能耗的影响。从图7 可以看出,PSOMA 算法在降低无人机总能耗上的性能较BASE_D、BASE_M、BASE_R 分别平均提高7.49%、8.66%和12.04%。

图7 当安全容量阈值变化时的无人机总能耗对比Fig.7 Comparison of toal energy consumption of UAV when the secure capacity threshold varies
在安全容量实现率γ方面,表4 所示为当安全容量阈值变化时的安全容量实现率对比。当安全容量阈值Smin从0.001 变化到0.500 时,PSOMA 算法和基准方案的γ值均呈下降趋势。其原因主要在于节点位置以及节点之间的信道质量,部分数据节点在当下的信道条件以及中继节点辅助下,其安全容量最优值仍小于设定的阈值,无法通过调整无人机的悬停点进行进一步优化,导致安全容量无法实现。
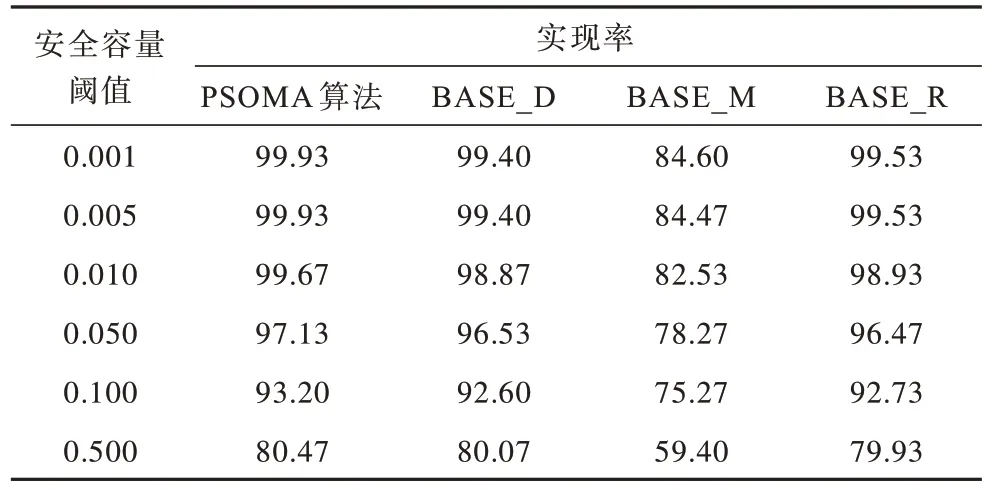
表4 当安全容量阈值变化时的安全容量实现率对比 Table 4 Comparison of secure capacity implementation rates when the secure capacity threshold varies %
此外,PSOMA 算法在安全容量实现率方面处于较优位置,基准方案BASE_D 和BASE_R 在安全容量实现率上表现相近,基准方案BASE_M 则最差。其中,当γ从0.001~0.500 变化时,PSOMA 算法在安全容量实现率方面较基准方案BASE_M 平均提高23.45%。
6 结束语
本文面向无人机安全通信网络场景,针对数据节点与无人机之间的数据安全传输,提出低能耗安全传输的无人机轨迹优化算法。无人机可为配备有EH 电路的中继节点进行无线传能,其能量收集过程采用更贴近实际的非线性函数表示。通过对无人机能耗模型以及节点之间的信道模型进行建模,本文对该优化问题进行形式化描述并证明了其NP 难解性。实验结果表明,PSOMA 算法在降低无人机能耗以及实现数据节点与无人机之间的安全传输上优于已有解决方案。下一步将开展无人机的避障问题研究,探讨online 算法设计技术,并结合地面节点移动性、网络环境动态变化等约束条件,系统研究动态环境下的无人机online 相关算法。
猜你喜欢
昆钢科技(2022年2期)2022-07-08
当代水产(2021年10期)2022-01-12
建材发展导向(2021年23期)2021-03-08
华人时刊(2018年15期)2018-11-10
电信科学(2017年6期)2017-07-01
航天器工程(2015年3期)2015-10-28
电子设计工程(2015年16期)2015-02-27
风能(2015年8期)2015-02-27
风能(2015年5期)2015-02-27
电测与仪表(2014年1期)2014-04-04