轴承变工况故障的域自适应迁移深度学习诊断
2024-02-29 09:24:56牟红霞
机械设计与制造 2024年2期
牟红霞
(山东职业学院,山东 济南 250104)
1 引言
随着机械设备智能化水平提高和机械结构日趋复杂,企业对设备的可靠性要求也越来越高。轴承等旋转机械由于工况复杂多变而容易发生故障,不仅影响企业的生产效率,严重时会造成巨大的经济损失,甚至机毁人亡[1]。因此,研究轴承故障的智能诊断技术具有重要的经济意义和安全意义。
轴承的振动信号中包含有丰富的故障信息,能够实时准确的反应轴承当前工作状态,因此轴承故障状态实时监测的信号主要为振动信号[2]。轴承故障诊断分为3个重要步骤:(1)振动信号的有效获取;(2)振动信号故障特征的提取;(3)轴承故障模式的准确识别。由于故障特征提取的优劣直接影响故障诊断结果,因此故障特征提取最为关键,常见的故障特征提取方法包括时域特征、频域特征和时频域特征[3]。时域特征出现最早,包括峰值、裕度、峭度等[4],由于时域特征抗干扰性能差,因此极易发生误判。频域特征的基础是傅里叶变换,频域特征分析方法包括频谱分析、倒谱分析、包络分析等[5],由于频域分析完全抛弃了时间域,因此无法分析非平稳非线性的振动信号。时频域特征结合了时域与频域的优点,即分析信号频率随时间的变化情况,先后出现了短时傅里叶变换、小波变换、经验模态分解等方法。文献[6]使用短时傅里叶变换提取信号的时频域特征,并使用卷积神经网络识别故障类型,经验证此方法对不同故障类型具有较高的识别准确率;文献[7]使用经验小波变换将振动信号分解为不同时间尺度的IMF分量,提取IMF分量中的时域、频域、时频域特征,而后使用流行学习法进行特征简化,该方法提取的故障特征具有更高的识别准确度;文献[8]针对强噪声背景下轴承微弱故障信号的特征提取问题,提出了级联自适应分段线性随机共振系统降噪的经验模态分解方法,有效减少了经验模态分解阶数,实现了强噪声背景下的微弱故障提取。传统的时域特征、频域特征和时频域特征能够有效提取轴承特征,但是由于种类繁多而难以选择。而且,当前故障诊断方法均假设训练样本和测试样本独立同分布,这对变设备、变工况、变故障程度的情况明显不适用。
这里研究了变设备、变工况条件下的轴承故障诊断问题,以深度卷积神经网络为基础,使用对抗训练的方式使深度学习网络获得域自适应迁移能力,域自适应迁移深度卷积神经网络能够提取不同域数据的共同特征,实现变设备、变工况条件下的轴承故障精确识别。
2 问题描述与基础知识
2.1 域自适应迁移问题描述
在迁移学习中,域D使用特征空间x和边缘概率分布P(x)进行定义和描述,含有n个故障样本的数据集可记为{,其中xi∈x,即xi属于特征空间x;yi∈y为样本标签,y={1,2,…,k}为轴承故障标签值(即故障状态值)。
传统故障诊断方法一般假设测试样本与训练样本独立同分布,因此经训练集训练完毕的故障诊断模型直接用于测试集的故障诊断。但是,训练集一般是在设定的实验环境下得到的,而将诊断模型应用于实际诊断时,设备实际运行环境与实验环境差别较大,必然引起故障模式误判。将实验环境下得到的有标签训练集称为源域,记为Ds={xs,P(xs) },将工作环境下得到的无标签测试集称为目标域,记为Dt={xt,P(xt) },由于训练集与测试集之间分布存在差异,直接将训练模型应用于测试集,必然引起模式误判,如图1所示。图中实线区域为源域,虚线区域为目标域,故障模式分界线依据训练集(即源域)确定。

图1 故障模式误判示意图Fig.1 Diagram of Fault Mode Misjudgment
为了解决这一问题,这里提出了域自适应迁移策略,该策略以提取测试集与训练集公共特征的方式,试图减小测试集与训练集之间的分布偏移,达到提高诊断模型泛化能力的目的,域自适应迁移效果,如图2所示。
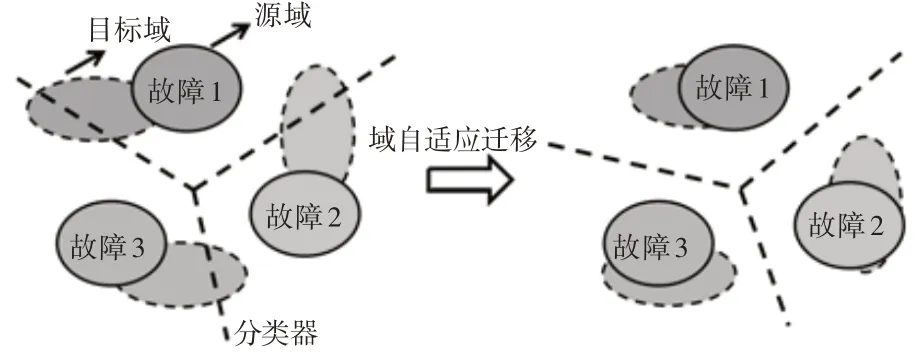
图2 域自适应迁移策略Fig.2 Domain Adaptive Migration Strategy
2.2 深度卷积神经网络
这里基于深度学习实现域自适应迁移策略,因此首先介绍深度卷积神经网络的深度学习方法。深度卷积神经网络由输入层、卷积层、池化层、全连接层、输出层等组成[9],其中卷积层与池化层交替出现,两者交替层数越多则特征提取越充分但同时计算量越大。
(1)卷积层。卷积层将上层输出与卷积核做卷积运算,生成特征输出,即:
(2)池化层。池化层作用是降低特征维度,提取最为重要的特征信息,防止出现过拟合问题。池化作用包括平均池化和最大池化两种,由于轴承故障时振动信号出现周期性极值,因此最大池化方式在轴承故障特征提取中极为适用。最大池化方法为:
(3)全连接层。全连接层一般与输出层的Softmax函数组成分类器,将最后一层池化层得到的输出特征进行平铺作为全连接层的输入,全连接层输出为:
式中:—第l+1层全连接层的第t个输出结果—平铺后的第k个特征量;—第l层第k个特征量与第l+1层第t个输出的传递权值;—第l+1 层网络的第k个神经元偏差;F()—ReLU激活函数。
(4)输出层。输出层使用Softmax函数计算每个标签的归一化概率,即:
式中:Hot—归一化概率矩阵;
p(y=t)—输出标签为t时的归一化概率;
T—输出标签数量。
3 域自适应迁移的深度卷积神经网络
3.1 构造思路
从本质上讲,深度卷积神经网络中卷积层与池化层的交替过程为输入数据的特征提取过程,而全连接层与输出层为故障模式的识别过程。但是传统的深度卷积神经网络明显无法解决域之间分布差异带来的故障误判问题,这里将域自适应迁移学习方法引入到深度卷积神经网络中,具体思路为:基于对抗训练的策略提取源域与目标域的公共特征,公共故障特征具有源域与目标域间的不可分辨性。
具有域自适应迁移能力的深度卷积神经网络结构,如图3所示。图中:Gf(·;θf)—故障特征提取模块,有标签数据和无标签数据使用完全一致的网络模型;Gd(·;θd)—二分类域识别器,用于判断故障特征属于源域或目标域;Gy(·;θy)—标签分类器,判断故障特征对应的故障模式;θf—故障提取模块的网络参数,θd—域识别器的网络参数,θy—标签分类器的网络参数。实现域自适应迁移的核心问题是提取源域与目标域的公共故障特征,即Gf(·;θf)的构造与训练。

图3 域自适应迁移深度卷积神经网络Fig.3 Deep Convolution Neutral Network With Domain Adaptive Migration
3.2 域自适应迁移能力实现
实现域自适应迁移的具体方法为:使用图3中的特征提取模块Gf(·;θf)提取源域与目标域的公共特征向量,将提取特征输入到域判别模块Gd(·;θd)中识别故障特征的域属性,当Gd(·;θd)无法判断出故障特征所属域时,说明提取特征为源域和目标域的公共特征。域自适应迁移需解决两个问题,一是故障提取的域不变性,二是故障模式的可识别性。
3.2.1 故障提取的域不变性。
域识别器Gd(·;θd)为二分类识别器,识别结果记为域标签di,当di=0时表示识别结果为源域,当di=1时表示识别结果为目标域。二分类交叉熵损失能够定量的评估识别器对源域和目标域的识别能力,因此这里使用二分类交叉熵损失描述二分类器的识别能力。对于任意一个输入样本xi,域识别器Gd(·;θd)的二分类交叉熵损失为:
式中:Ld—二分类交叉熵损失。
式中:E()—二分类交叉熵损失正则项,是关于参数θf与参数θd的函数;ns—源域数据量;nt—目标域数据量。
使用对抗训练机制以交替的方式轮流训练域识别器参数θd与特征提取模块参数θf,即:
式(7)中第一式表示熵损失朝着减小的方向对参数θf进行训练,意味着模块Gf(·;θf)提取的故障特征在源域和目标域朝着无差异方向优化,使得域识别器Gd(·;θd)无法准确识别域标签;式(7)中第二式表示熵损失朝着增大的方向对参数θd进行训练,从而提高模块Gd(·;θd)的域识别能力,通过这种对抗交替训练的方式,逐渐减小源域数据特征与目标域数据特征的差异。
3.2.2 故障模式的可识别性。
使用源域的有标签数据集可以训练标签分类器Gy(·;θy),实现对源域数据的准确分类。而特征提取模块Gf(·;θf)提取了源域与目标域的无差别特征,因此标签分类器可以对目标域特征进行分类。对于任一有标签数据{},标签分类器Gf(·;θf)的交叉熵损失为:
在交叉熵损失中融入模型参数正则项,得到标签分类器模块的参数优化目标函数为:
式中:λ—超参数;Φ(θf,θy)—模型参数正则项。
综合考虑故障提取的域不变性与故障模式的可识别性,得到参数θf、θd、θy的综合训练目标函数为:
式中:E(θf,θy,θd)—综合训练目标函数,等式右侧第一项为标签分类器的交叉熵损失项,第二项为参数正则项,第三项为域识别器的二分类交叉熵损失项。与前文对抗训练思路一致,得到参数的θf、θd、θy综合对抗训练方法为:
3.3 模型参数训练
对于参数θf、θd、θy的综合训练,θy依据源域有标签数据集的交叉熵损失Ly进行训练,θd依据二分类交叉熵损失Ld进行训练,而θf则同时由Ly和Ld进行更新。由于θd朝着Ld增大的方向进行训练,文献[10]以梯度反转方式实现了θf与θd的交替训练,这里以改写二分类交叉熵损失函数的方式,使θd朝着改写熵损失函数减小的方向训练,为:
式(12)将域标签更改为相反值,即源域时di=1,目标域时di=0。按照这种构造方法,θd朝Ld增大的方向优化,就相当于朝着Ld'减小的方向优化,因此可以传统的参数训练方法。这里选择随机梯度下降法进行参数训练,为:
式中:μ—学习效率。
3.4 域自适应迁移模型诊断流程
基于深度卷积神经网络的域自适应迁移故障诊断可以分为3步实现:
(1)使用源域的有标签数据集对图3中的特征提取模块和标签分类器模块进行预训练,训练完毕的特征提取模块参数作为此模块的参数初值,训练完毕的标签分类器模块参数作为此模块的参数终值。
(2)将预训练所得参数作为特征提取模块参数初值,综合使用源域数据集和目标域数据集,以深度对抗训练的方式,确定特征提取模块参数和域识别器模块参数,实现域自适应迁移能力,减小源域和目标域的特征差异。
(3)将目标域数据集输入到训练完毕的诊断模型中,进行故障模式识别。
4 实验验证
4.1 实验设置
这里使用美国凯斯西储大学的轴承数据和智能维护系统中心的轴承数据构造不同设备、不同工况下的故障诊断实验。
美国凯斯西储大学轴承数据样本:选择轴承型号为SKF6205的数据样本,轴承状态分为正常状态、内圈故障、外圈故障和滚动体故障,选择故障直径为0.007英寸下的实验数据,实验采样频率为12kHz,在实验载荷分别为0HP、1HP、2HP、3HP条件下各选取250个样本,每个样本长度为2048,则共抽取250×4×4=4000个样本数据,此样本记为样本A。
智能维护系统中心轴承数据样本:此数据集包含型号为Rexnord ZA-2115 轴承的全周期振动数据,随着退化实验的进行,轴承故障程度不断加深。实验结束时1#轴承为外圈故障,3#轴承为内圈故障,4#轴承为滚动体故障,实验采样频率为20kHz,抽取每种工作状态下1000个样本,样本长度为2048。共抽取两组样本,分别记为样本B和样本C,由于此实验为轴承的全周期实验,因此样本B和样本C为不同故障程度下的轴承实验数据。
4.2 深度神经网络结构及参数
为了形成对比,这里同时使用传统深度卷积神经网络与域自适应迁移深度卷积神经网络进行变设备、变工况下的模式识别,传统深度卷积神经网络没有域识别器模块,其余结构与域自适应迁移深度卷积神经网络一致。域自适应迁移深度卷积神经网络由13层网络构成,1~10层为卷积层与池化层交替,功能上讲为特征提取模块Gf(·;θf),11~13层为全连接层与输出层,功能上讲为标签分类器Gy(·;θy);并列11~13层为域识别器Gd(·;θd),网络结构,如表1所示。传统深度卷积神经网络使用源域的有标签数据集进行训练后,直接应用于目标域的故障模式识别;而域自适应迁移深度卷积神经网络按照3.3节的过程进行训练,从而获得域自适应迁移能力和故障模式判别能力。

表1 网络结构Tab.1 Network Structure
4.3 实验结果及分析
根据4.1 节抽取的样本A、样本B和样本C,设计4 组迁移实验,分别为A→B,A→C,B→A和C→A。以A→B为例,其含义为以样本A为源域的有标签数据集,以样本B为目标域的无标签数据集进行诊断。传统深度卷积神经网络和域自适应迁移深度卷积神经网络对4种迁移实验的诊断结果,如表2所示。

表2 诊断结果Tab.2 Diagnosis Result
由表2可知,在变设备、变工况条件下,传统深度卷积神经网络在4组实验中的诊断准确率均值为64.5%,域自适应迁移深度卷积神经网络的诊断准确率均值为94.9%,比传统深度学习方法提高了47.13%,说明域自适应迁移深度卷积神经网络能够有效应对变设备、变工况条件下的轴承故障诊断问题,基于深度对抗训练的域识别器与特征提取模块联合训练方法,能够有效提取源域与目标域的共同特征,从而获得域自适应迁移能力。
为了更加直观地展示域迁移效果,使用t-分布邻域嵌入算法[11]对标签分类器最后一层全连接层的特征降维到2维空间,以迁移实验A→B、A→C为例,降维后特征的空间分布,如图4、图5所示。图中横纵坐标均为无量纲特征量,图例中“内”指内圈故障“源”指源域,“目”指目标域,“内-源”指源域的内圈故障数据,其余与此含义解释一致。
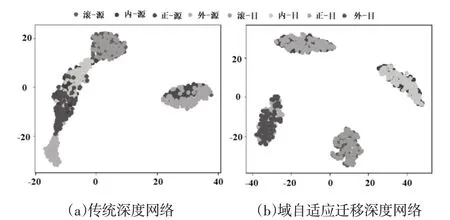
图4 A→B实验的特征量分布Fig.4 Characteristic Quantity Distribution of Experiment A→B

图5 A→C实验的特征量分布Fig.5 Characteristic Quantity Distribution of Experiment A→C
分析图4、图5可以看出,对于源域数据,传统深度卷积神经网络能够有效进行故障模式识别,但是由于目标域与源域存在分布差异,直接将深度学习模型应用于目标域时,存在大片重合和混叠区域,无法有效识别出故障模式。而域自适应迁移深度学习网络能够明确区分源域和目标域的4种轴承状态,不存在重合和混叠部分,说明这里设计的域自适应迁移技术有效减小了源域和目标域的分布差异,实现了变设备、变工况条件下的轴承状态精确识别。
5 结论
这里研究了变设备、变工况条件下的轴承故障诊断问题,以深度卷积神经网络为基础,以对抗训练机制实现了深度学习网络的域自适应迁移能力。经实验验证得出以下结论:(1)在变设备和变工况条件下,域自适应迁移深度卷积神经网络能够以较高精度识别轴承故障模式,识别精度远高于传统深度卷积神经网络;(2)对抗训练方式能够使深度学习网络有效获得域自适应迁移能力。
猜你喜欢
计算机技术与发展(2024年3期)2024-03-25 02:10:02
哈尔滨轴承(2022年2期)2022-07-22 06:39:32
哈尔滨轴承(2022年1期)2022-05-23 13:13:24
哈尔滨轴承(2021年2期)2021-08-12 06:11:46
哈尔滨轴承(2021年1期)2021-07-21 05:43:16
计算机技术与发展(2020年11期)2020-12-04 07:50:46
车迷(2018年11期)2018-08-30 03:20:32
海峡姐妹(2018年3期)2018-05-09 08:21:02
公民与法治(2016年10期)2016-05-17 04:12:58
电子与信息学报(2015年12期)2015-08-17 11:14:42