多参数变弯度翼型气动优化设计方法
2024-02-29 08:04王巍冯贺刘畅黄茹
科学技术与工程 2024年3期
王巍, 冯贺, 刘畅, 黄茹
(1.沈阳航空航天大学民航学院, 沈阳 110136; 2.航天神舟飞行器有限公司, 天津 300450)
节能减排、提高燃油效率、节省营运成本和增升减阻一直是大型民用飞机设计的主要目标[1]。为了提高飞机的气动效率,国内外学者和研究机构都开展了一些变形技术研究,其中具有代表性的有变弯度机翼技术,是指随着飞行状态的改变,不断变化前缘或后缘偏转装置,连续调整机翼截面的弯度,以保持最佳的空气动力性能[2]。关于变弯度机翼气动特性分析以及结构设计的研究已经取得一定进展。Ting等[3]和Bret等[4]为美国国家航空航天局(National Aeronautics and Space administration,NASA)通用运输机研制了变弯度尾翼装置,与传统的襟翼配置相比,该技术减阻8.4%。吕帅帅等[5]、张桢锴等[6]设计了机翼变弯度演示器,使机翼后缘连续改变弯角,并通过风洞测试来探究机翼的气动特性。Yokozeki等[7]和Gaspari等[8]分别采用风洞试验和数值模拟的方法研究了连续变弯度机翼和有缝曲面机翼的气动性能,并且Eguea等[9]将前缘和后缘的变弯度概念应用于中型公务机,结果表明连续变弯度前后缘机翼具有更好的升力特性。Lü等[10]设计了一种应用于巡航阶段的变弯度后缘机翼构型,与传统机翼相比,后缘连续变弯度能够扩大缓冲区的起始边界。
此外,有关变弯度机翼变形原理和优化设计也取得了很大的进展。Niu等[11]提出了一种融合了变量-腔体-边缘技术的机翼优化策略,结果表明该方法可以获得更好的优化形状。Zhang等[12]采用基于梯度的跨音速气动优化框架,提出了巡航阶段阻力最小变形策略。Gaspari等[13]基于CST(central standard time)参数化方法来扩展缓冲区起始边界,改善了典型喷气式飞机的飞行性能。Smith等[14]和Molinari等[15]都采用了基于遗传算法(genetic algorithm,GA)的多目标遗传算法来优化变弯度气膜的气动形状和柔性结构。基于变弯度技术的应用研究,寇鑫等[16]和王宇等[17]通过控制变形参数和内部智能驱动结构,使机翼蒙皮在有限点的驱动下实现从初始到目标构型的精确变形。赖怡等[18]提出基于模拟退火算法的垂直轴风机翼型智能优化算法,改善了翼型的失速性能。孟军辉等[19]提出一种无舵面飞机变弯度机翼承载设计方案,对提高飞机在不同飞行环境的飞行性能具有积极意义。保女子等[20]提出一种基于神经网络算法的翼型优化策略,提升了翼型的声学性能。刘龙等[21]提出一种基于厚度不变的翼型前后缘连续偏转变形规律,分析了前后缘偏转角度变化对气动特性的影响。文献[20-21]都引入了前后缘偏转角度和位置的设计变量,但没有充分考虑上下翼面曲线的光滑连续问题。
现分析前、后缘偏转角度、偏转位置对翼型气动性能的影响规律,在此基础上增加前后缘连续段为设计变量,提出一种多偏转参数和B样条相结合的翼型前后缘连续变弯度变形方法。提出基于多目标遗传算法的气动优化策略,得出最佳机翼气动外形,并通过数值仿真对模型进行验证和分析。
1 变弯度参数化与流场数值计算
1.1 变弯度翼型参数化方法
根据美国国家航空航天局的可变弯度后缘襟翼(Variable camber continuous trailing edge flap,VCCTEF)项目[20],在改善气动性能方面,翼型中弧线作类抛物线轨迹变弯度的布局是最优的。本节中的偏转参数均位于翼型的中弧线上,翼型前后缘偏转方式定义如图1所示。变弯度翼型由三部分组成,即偏转区域、过渡区域和固定区域。A(A0)和B(B0)分别是前缘点和后缘点,C和F分别是前后缘的偏转位置点,D和E是偏转区域和固定区域的连续点;γ和β表示前、后缘的偏转角度;ε和η分别为前、后缘的过渡长度。前、后缘的偏转位置、偏转角度和过渡段等6个设计参数来控制翼型弯度变化。
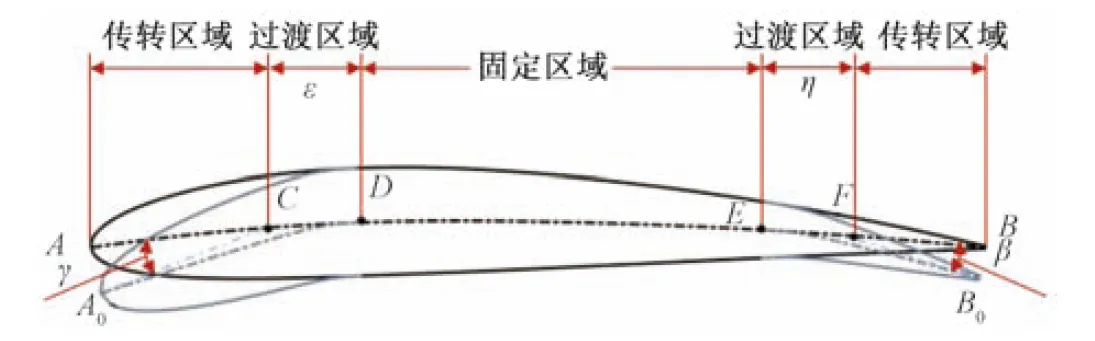
图1 变弯度翼型参数化定义Fig.1 Definition of variable-camber airfoil parameters temperature curves
以A为坐标原点,将相关坐标无量纲化,即翼型弦长c=1。变弯度前缘的相对弯度和相对厚度分布曲线的表达式为
yc=a0+a1x+a2x2
(1)
(2)
式中:ai为相对弯度分布系数;bi为相对厚度分布系数;x为沿中弧线的位置横坐标。基础翼型前缘中弧线AC为
(3)
偏转半径为
(4)
A0C的斜率为
k1=tan[arctan(klea)+β]
(5)
A0(x0,y0)表达式为
(6)
偏转前后中弧线长度不变即lA0C=lAC,使用积分方法求得曲线长度为
(7)
另外,后缘中弧线BE的数学表达式为
(8)
式中:f=0.04代表翼型最大相对弯度,p=0.3,代表最大弯度的弦向位置在0.3c处。A0(x0,y0)为中弧线最高点的坐标;(xr1,yr1为偏转点C的坐标;klea为直线AC的斜率。根据式(1)~式(8),可以解算出a0、a1、a2这3个参数。
当前导出的中弧线是由变形部分A0C、B0F和过渡部分CD、EF组成的折线段。B样条因其良好的连续性和局部控制能力而广泛用于描述曲线[22]。因此,使用B样条方法拟合两段曲线,使偏转部分和固定部分光滑连续。B样条基本函数的数学表达式为
(9)
式(9)中:di为第i组输入控制点;N代表B样条基函数;m为B样条的阶数;u代表节点向量。采用四段三次非均匀B样条曲线用于表示偏转后的中弧线,基函数C(t)则定义为
(10)
其中定义样条基函数的节点向量集合U为
U={0,0,0,0,u1,u2,u3,1,1,1,1}
(11)
此节点向量确保拟合曲线经过中弧线边界点。B样条曲线的控制点如图2所示,A0和D即为控制多边形的边界。
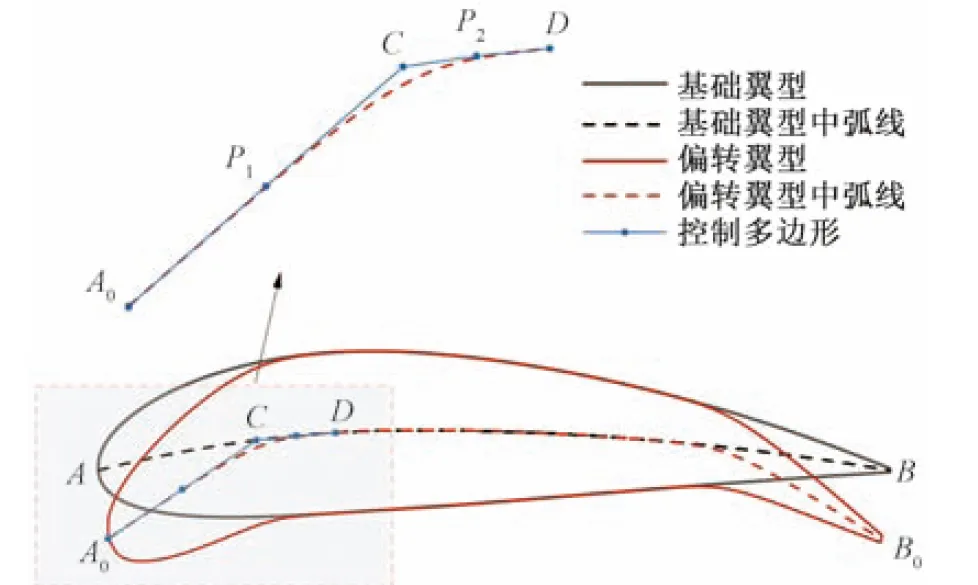
图2 B样条控制多边形定义Fig.2 B-spline control polygons
偏转部分和固定部分在D处是连续的,即中弧线相对厚度分布是连续的。基础翼型相对厚度分布函数为

(12)
式(12)中:t=0.2为基础翼型的最大相对厚度。偏转后D点相对厚度分布的表达式为
(13)
采用曲率工具验证变弯度翼型上下表面的光顺性,曲率值波动越小,翼型表面光滑连续性越好。曲率计算表达式为
(14)
如图3所示,翼型前后缘的变化程度不同,前缘上翼面偏转程度较大,且上翼面曲线的适应性优于下翼型。此外,上下翼面曲率变化连续,没有断点和奇点,表明翼型表面光滑连续,光顺性较好,能够确保后续翼型气动性能分析的准确性。
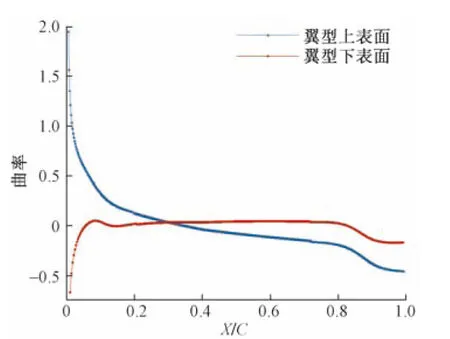
X/C为翼型上的点相对于翼型的弦长的横坐标位置图3 变弯度翼型上下翼面曲率变化Fig.3 Airfoil profile curvature variation diagram
1.2 数值模拟方法和控制方程
本中选取的流场分析方法是基于湍流模型的不可压缩雷诺平均方程为
(15)
动量守恒的偏微分方程为
(16)
式(16)中:P为平均压力;xi、xj为i、j方向的坐标;ui为i、j方向的平均速度;μ为分子黏度;ρ为密度。式(16)代表动量对流和瞬态对流,右侧代表是流体压力、雷诺应力和黏性力。采用Boussinesq对雷诺应力近似建模,对不可压缩流定义表达式为
(17)
式(17)中:δij为湍流黏度;k为湍流动能。选取精度高且计算复杂度低的k-ω湍流模型,使用基于压力-速度耦合求解器,选取二阶迎风精度的空间离散方法。其中,湍流模型的数学方程为
(18)
式(18)中:Γk、Gk、Yk和Γω、Gω、Yω分别为k和ω的有效扩散率、平均速度梯度和耗散;Dω为交叉扩散。
选取NACA3412翼型为计算实例,马赫数Ma=0.18,攻角α=6°,雷诺数Re=3.9×106。计算网格的划分情况如图4所示。表1所示为不同单元数量下的阻力系数CD和升力系数CL的计算值。随着网格单元数量的增加,CD的值减小,CL的值增大。1.2×106与2.1×106网格单元之间的差值小于0.000 01,网格收敛性良好,因此最终选择单元网格数量为1.2×106的划分方式进行数值模拟。
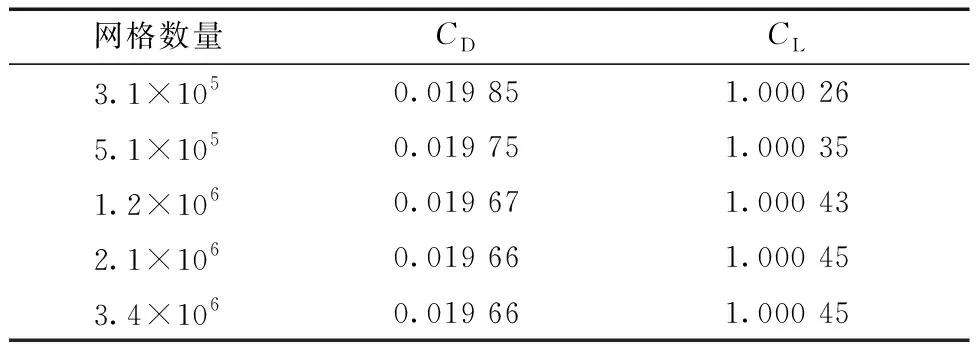
表1 网格收敛性验证Table 1 Drag and lift coefficients for different grids
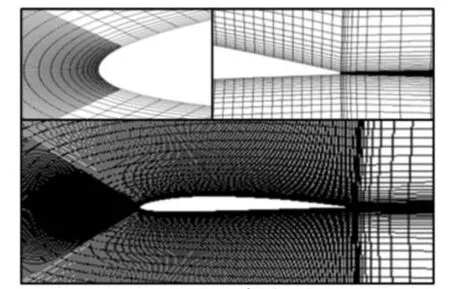
图4 翼型网格Fig.4 Computational grids
2 变弯度前后缘气动特性分析
本节研究翼型前后缘偏转参数对气动性能的影响规律,前后缘偏转参数的具体信息如表2所示。
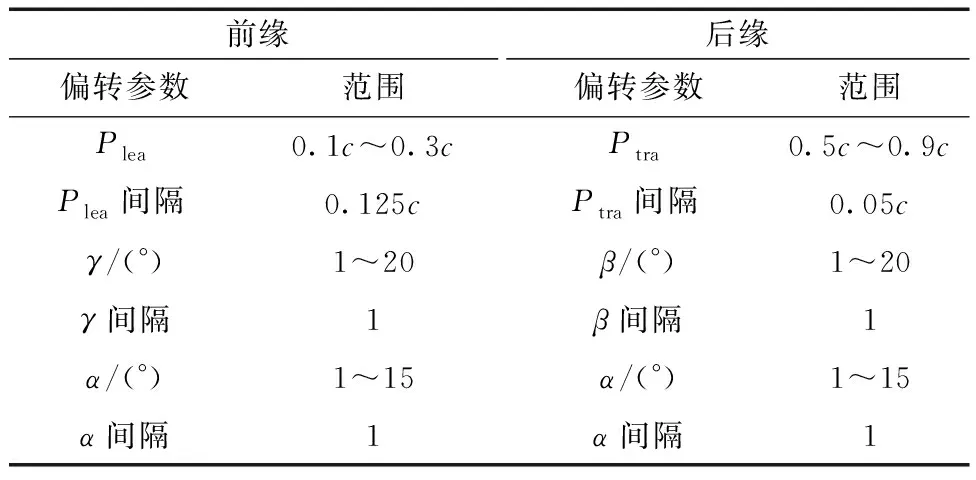
表2 偏转参数信息Table 2 Geometric information of variable-camber airfoils
2.1 变弯度前缘对气动特性影响规律
设置Plea=0.2c、Ma=0.18。不同前缘偏转角度对翼型气动性能影响规律如图5所示。如图5(a)所示,当α<12°时,偏转前后翼型CL变化基本一致;当α>12°时,偏转翼型CL增大,且最大CL比基础翼型提高9.3%。如图5(b)所示,当α<4°时,偏转翼型CD略小于基本翼型;当α>4°时,随着攻角的增加,偏转翼型的CD明显减小。如图5(c)所示,最大升阻比攻角增大到9°。当α<9°时,升阻比K随着γ的增大而减小;当α>9°时,K随着γ的增大而增大;γ=11°时K达到最大值58.59,比基础翼型提高约15.2%。
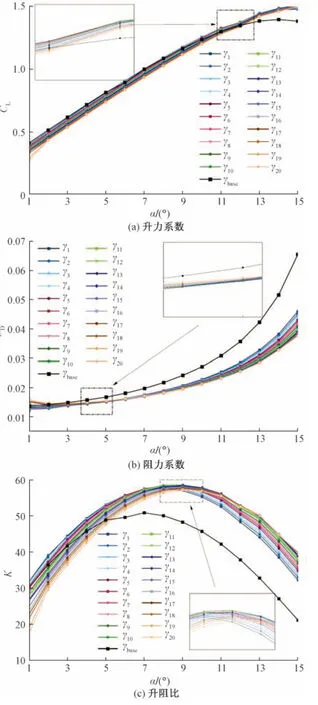
图5 前缘偏转角度对翼型气动性能影响规律Fig.5 Numerical results comparison between basic and variable-camber airfoils
设置γ=6°。不同前缘偏转位置对翼型气动性能影响规律如图6所示。如图6(a)所示,当α<12°时,偏转前后翼型CL几乎相同;当α>12°时,偏转翼型CL明显增大,最大CL比基础翼型提高约8.9%。如图6(b)所示,偏转翼型CD明显小于基础翼型,且随着攻角的增大,减阻效果增强。如图6(c)所示,随着Plea增大,K先增大后减小,Plea=0.2c时,K达到最大值58.35,比基础翼型提升约16.6%。最大升阻比攻角增大到8°。
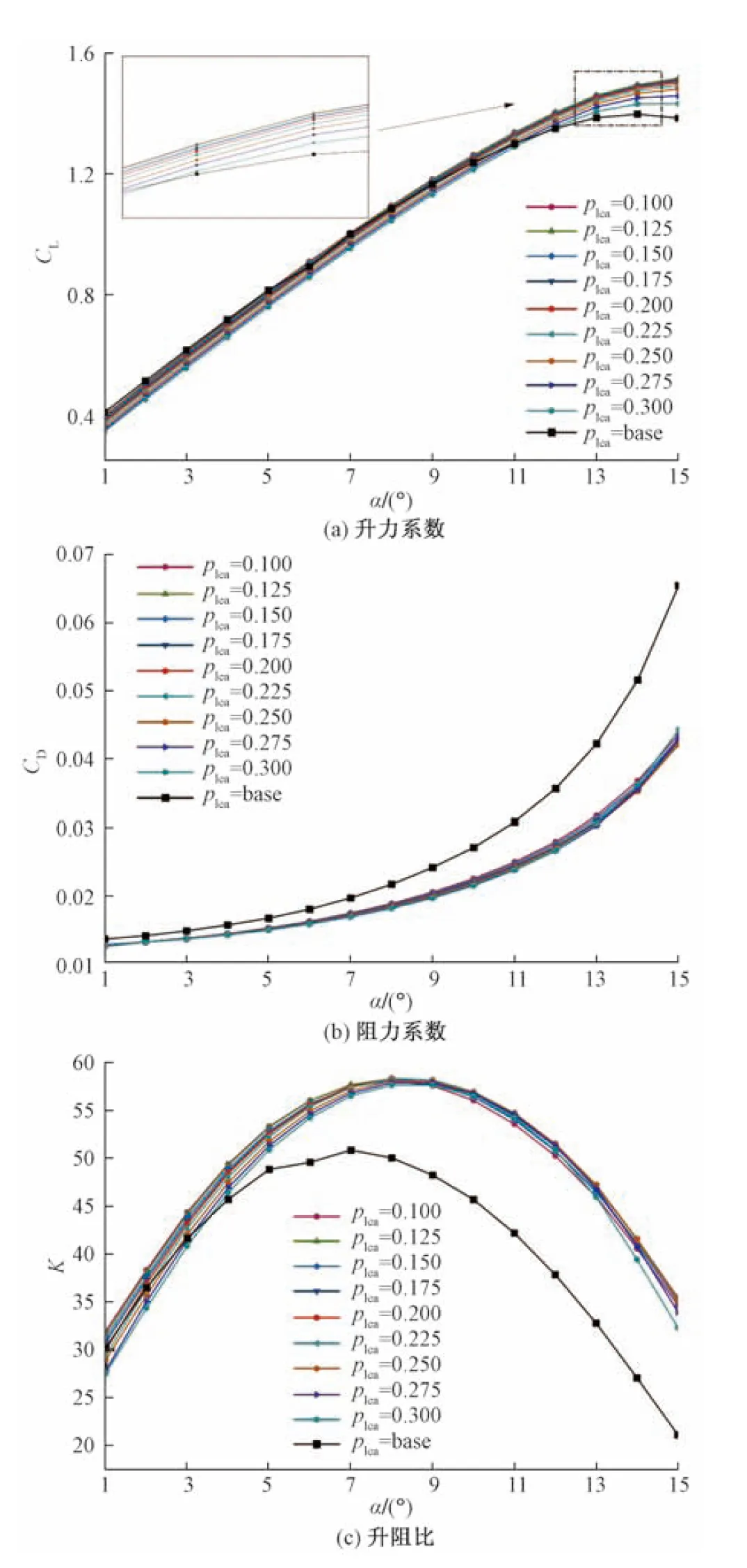
图6 前缘偏转位置对翼型气动性能影响规律Fig.6 Numerical results comparison between basic and variable-camber airfoils
2.2 变弯度后缘对气动特性影响规律
设置Ptra=0.6c。不同后缘偏转角度对翼型气动性能影响规律如图7和图8所示。如图7(a)所示,偏转翼型CL高于基础翼型,且随β的增加而增大。如图7(b)所示,当β<3°时,偏转翼型CD略低于基础翼型;当β>3°时,变化相反。如图7(c)所示,当β=4°时,K达到最大值56.86,比基础翼型提升约11.8%。当α>5°时,偏转翼型K均有不同程度地提高。如图8(a)和图8(b)所示,偏转翼型CL明显高于基础翼型,且随着β的增加,CL和CD曲线变化无规律。如图8(c)偏转翼型K小于基础翼型,且随着β的增加而单调减小。
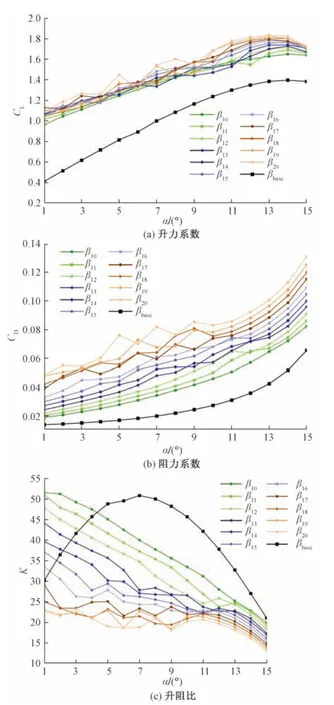
图8 后缘偏转角度(β≥10°)对翼型气动性能影响规律Fig.8 Numerical results comparison between basic and variable-camber airfoils
设置β=5°。后缘偏转位置对翼型气动性能影响规律如图9所示。如图9(a)所示,偏转翼型CL基本大于基础翼型。当α<9°时,CL随着Ptra增大而减小;当α>9°时,CL随着Ptra增大而增大;当Ptra接近固定位置时,CL迅速减小。如图9(b)所示,偏转翼型CD略高于基础翼型,且随着Ptra的增大而减小。当Ptra<0.75c时,偏转翼型CD显著高于基础翼型,且随着攻角的增加迅速增大。如图9(c)所示,当α<4°时,K随着Ptra的增加而减小;当α>4°时,K随着Ptra的增加而增大,Ptra=0.75c时,K达到最大值为58.66,比基础翼型提升约15.6%。
由图7~图9可知,后缘偏转增升效果显著,但是较大的偏转角度和较小的偏转位置均会抑制翼型的气动性能。前缘偏转可以增大失速攻角进而改善失速特性,减阻效果明显。此外,若后缘偏转角度太大,翼型的失速攻角将急速减小,前缘偏转位置不宜过大,后缘偏转位置不宜过小。
3 变弯度前后缘气动优化设计
3.1 多目标遗传算法
非支配排序遗传算法(non-dominated sorting genetic algorithm-Ⅱ,NSGA-II)是一种基于自然选择过程的梯度无关进化优化方法,具有高效的全局搜索能力,适合解决翼型几何多目标优化问题[23]。根据第1节,变弯度翼型的变形几何外形包括偏转部分和过渡部分,因此,本节优化设计中前后缘过渡部分也作为设计变量。变弯度翼型的多目标优化过程如图10所示。
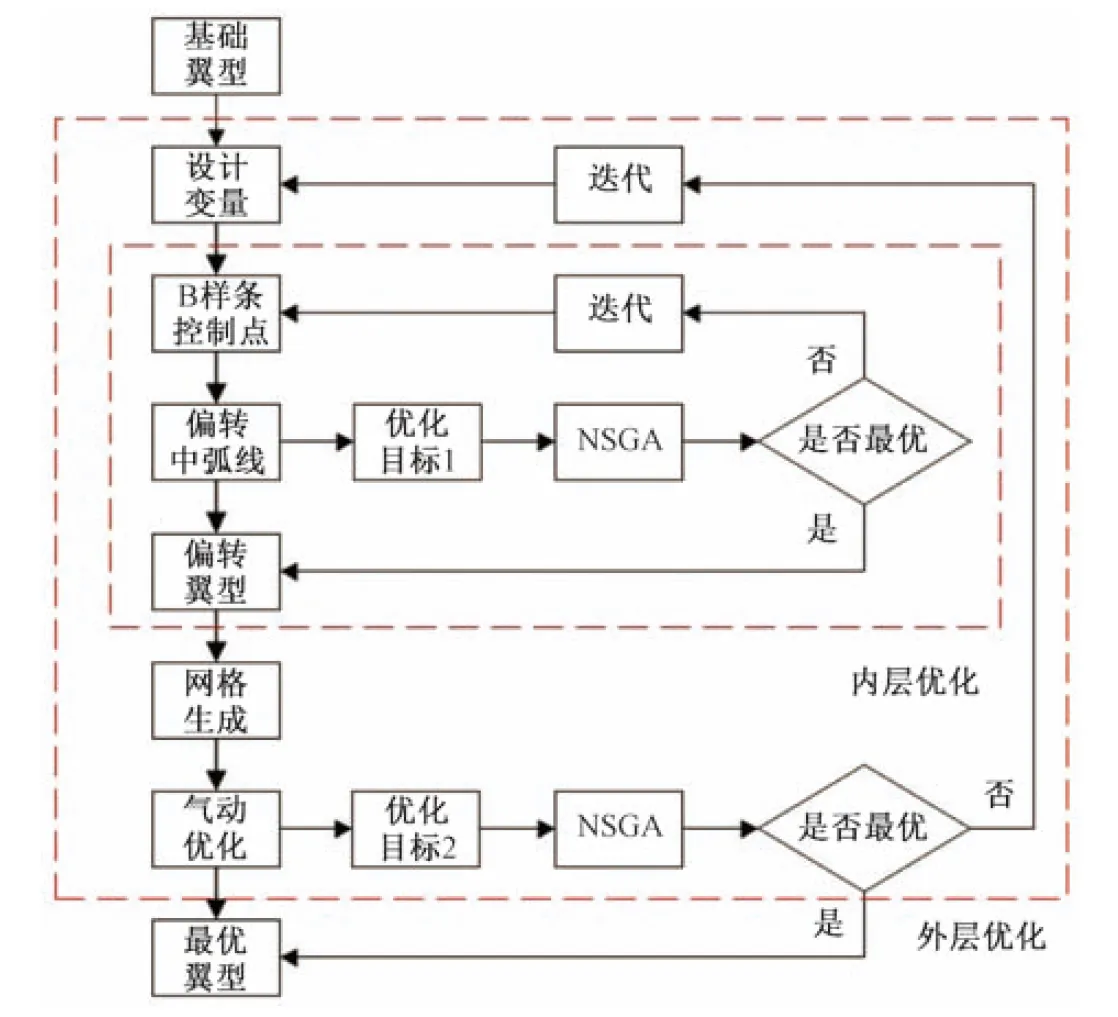
图10 多目标遗传算法流程图Fig.10 Flowchart of multi-objective optimization
优化设计流程主要包括两层循环:内层循环目标是获得光顺性较好的变弯度翼型中弧线,设计变量是B样条控制多边形的控制点(p1,p2,p3,p4);外层循环是为了优化变弯度翼型的气动特性。设计变量是6个偏转参数(γ,β,Plea,Ptra,ε,η);这两层循环嵌套在基于NSGA-Ⅱ的优化算法中,控制最优翼型的偏转参数,获取目标翼型。
内层优化算法的目标和约束条件为
(19)
式(19)中:Con()表示前后缘偏转连续点的曲率适应度函数;yc和ycn分别表示基础翼型和变弯度翼型中弧线函数;xpi表示B样条的控制点坐标;xA0、xB0、xC、xD、xE、xF用于限制控制点的取值范围,以防止曲线重叠。
外层优化算法的目标和约束条件为
(20)
式(20)中:γ、β、Plea、Ptra、ε、η6个偏转参数作为设计变量,确保K和CL在给定条件下的最佳气动性能。
3.2 优化结果和数值分析
设置攻角α=6°,马赫数Ma=0.235,种群数量为20,进化代数为40。设计变量的优化结果如表3所示,可以看出优化后的设计参数均与第2节中的规律相符。表4给出了基本翼型和优化翼型的气动特性对比结果。基础翼型和优化翼型气动特性对比结果如图11所示。
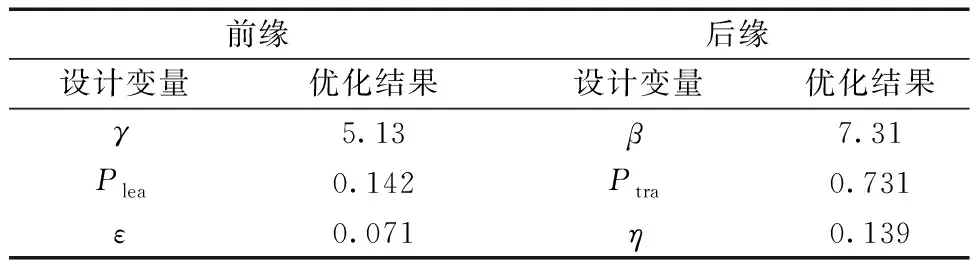
表3 前后缘偏转参数优化结果Table 3 Optimized results of input variables for variable-camber airfoil

表4 优化翼型与基础翼型气动特性计算值Table 4 Comparison aerodynamic characters
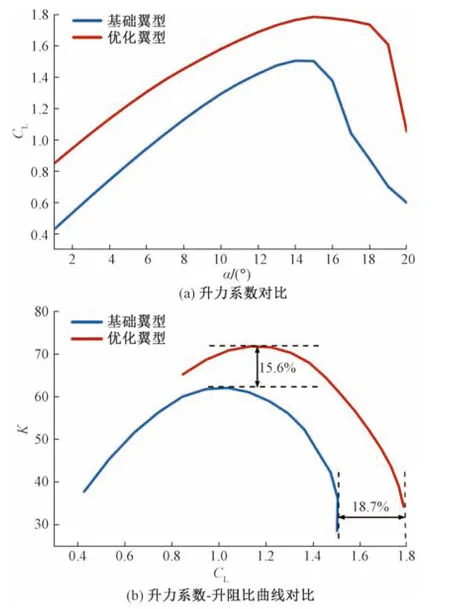
图11 优化翼型与基础翼型气动性能对比Fig.11 Comparison of aerodynamic performance between the basic and variable-camber airfoil
如图11所示,优化翼型升力CL和升阻比K在整个攻角变化范围内均得到了显著改善。如图11(a)所示,优化翼型在不同攻角下的升力系数比基础翼型提升一倍,这表明,前后缘变弯度翼型具有显著的增升效应,并且优化翼型的失速攻角增大到18°,这在一定程度上改善了翼型失速特性。如图11(b)所示,优化翼型升力CL范围扩大了18.7%,而K范围扩大了15.6%。
来自机翼远前方的气流被机翼前缘阻挡,气流速度沿翼型前缘表面减慢,压力增大。如图12(a)所示,基础翼型上表面的负压区和下表面的正压区主要集中在前缘。当翼型前缘偏转角度增大时,上表面负压区略微膨胀,下表面正压区扩展到后缘,上下表面之间的压差增大,使得升力迅速增加。如图12(b)所示,上翼型表面的负压值高于基本翼型,下表面的正压力值也高于基本翼形,这减小了反向压力梯度,这使得失速攻角增大。优化后的变弯度翼型上下表面压差增大,气动特性得到改善。
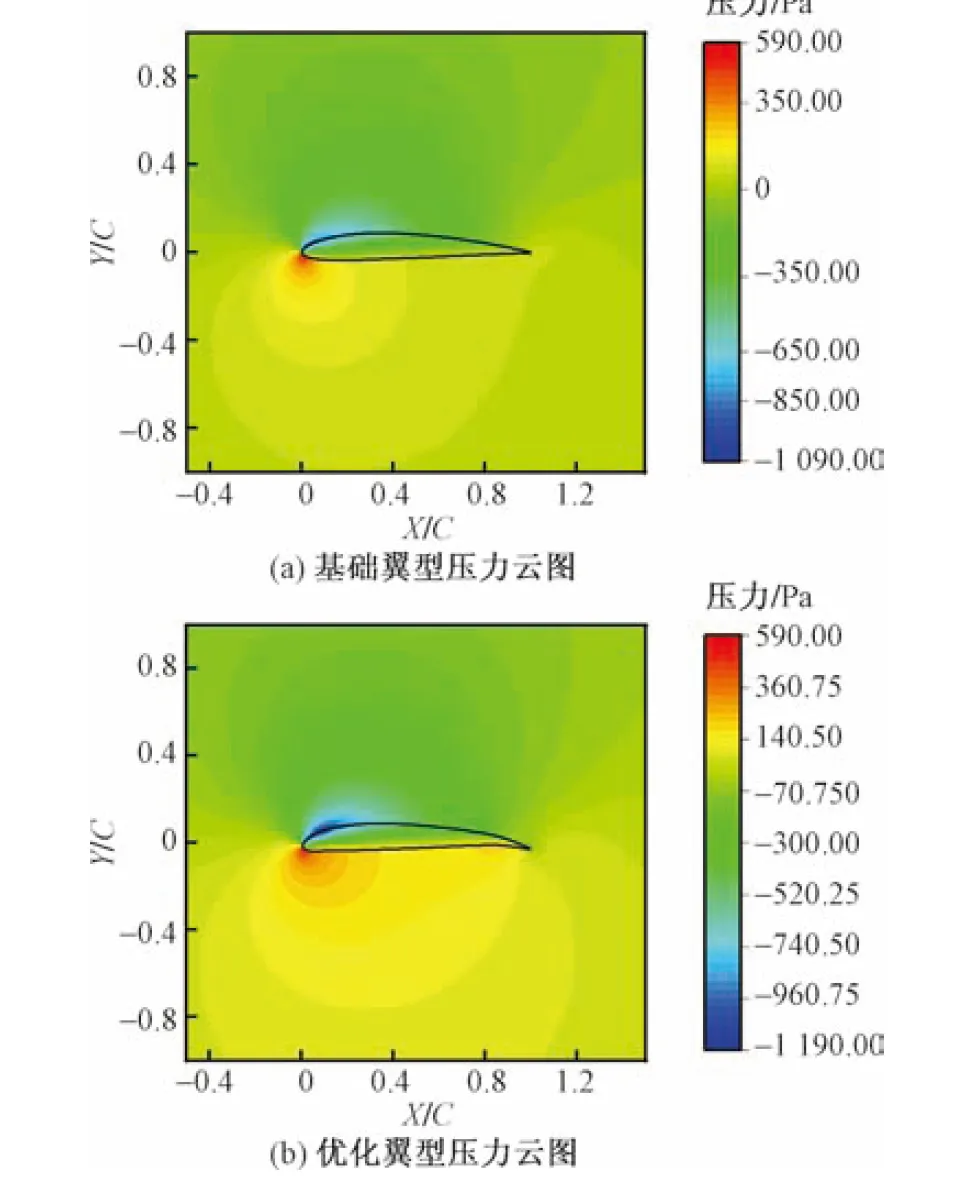
X/C、Y/C分别表示翼型上的点相对于翼型的弦长的横、纵坐标位置图12 优化翼型与基础翼型压力分布对比Fig.12 Pressure distributions between the basic airfoil and optimized airfoil
4 结论
本文采用多偏转参数与B样条相结合的方法建立变弯度翼型参数化模型。以升力系数和升阻比为优化目标,采用多目标遗传算法进行优化计算。根据数值计算结果,可以得出以下结论。
(1)多偏转参数与非均匀B样条相结合的变弯度翼型优化方法可以准确描述机翼的气动形状,控制翼型前后缘的偏转角度和位置和过渡段长度。
(2)基于双层循环的NSGAⅡ优化算法提高了获取目标翼型的运算速度和鲁棒性,并保证了非劣最优解的均匀分布,计算效率高,算法通用性好。
(3)在全攻角范围内,后缘偏转可以显著改善翼型的气动性能,但偏转角度不宜太大。在大攻角下,前缘的减阻作用占主导地位,特别是距前缘0.2c处,前缘偏转提供了更高的升阻比增益。在小攻角下,后缘偏转的增升作用占主导地位,特别是距前缘0.9c处,后缘偏转提供了更高的升阻比增益。
(4)优化后的变弯度翼型与基础翼型相比,上翼面的负压值变大,下翼面的正压值变大,整个翼面正压区域加宽20%,使得升力提高44.43%,升阻比提高19.26%,翼型气动性能明显改善。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
西安航空学院学报(2020年5期)2020-12-08
宇航总体技术(2019年5期)2019-10-11
北京航空航天大学学报(2017年8期)2017-12-20
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年2期)2016-12-01
川北医学院学报(2015年5期)2015-12-05
振动与冲击(2015年2期)2015-05-16
空气动力学学报(2015年3期)2015-04-14
青年文学(2011年24期)2011-08-15