基于自适应阈值的北斗三频周跳探测与修复方法
2024-02-28 14:00王凯锋孙永荣付希禹吴玲
科学技术与工程 2024年3期
王凯锋, 孙永荣, 付希禹, 吴玲
(南京航空航天大学导航研究中心, 南京 211106)
北斗卫星导航系统(Beidou navigation satellite system, BDS)高精度定位中,正确的整周模糊度解算是实现厘米级定位精度的前提。接收机在接收卫星信号时,若受到障碍物遮挡、多路径效应、电离层扰动、接收机快速运动等因素的影响,可能导致载波相位观测值产生整周模糊度的跳变,这种现象被称为周跳[1]。因此,对周跳进行正确探测并修复是实现连续性高精度定位的关键。
常用的周跳探测方法有:高次差法、多普勒积分法、电离层残差法、宽巷相位减窄巷伪距法 (Melbourne-Wübbena, MW)、电离层残差历元间二次差算法(second-order time-difference phase ionosphere residual, STPIR)、TurboEdit法、伪距相位组合法、无几何相位组合法、卡尔曼滤波法等[2-3]。其中大多数方法是基于伪距和载波相位进行周跳探测,基于多普勒的周跳探测方法较少。近年来,随着接收机的发展,多普勒观测值质量逐渐提高,利用多普勒辅助周跳探测和修复的研究也开始增多[4]。
早期研究人员采用单频多普勒积分法来进行周跳探测,该方法只有在高采样率、静态环境下有较好的探测效果[5]。文献[6]研究了平滑时间常数,调整单频多普勒积分法和单频伪距相位组合法的权重,弥补了不同采样率条件下两种单频周跳探测方法的不足。文献[7]采用惯性辅助估计多普勒残差,提升了单频周跳探测的性能。双频周跳探测方面,文献[8]利用多普勒积分改进MW法,提高了双频周跳探测性能。三频方面,文献[9]为抑制低采样率情况下多普勒积分误差的影响,引入平衡因子调整伪距和多普勒的权重,设计了基于多普勒辅助的HWM(Hatch-Melbourne-Wubbena)组合。文献[10]采用多普勒积分辅助伪距相位组合,并联合STPIR 法,提高了低采样率数据的周跳探测精度。
关于三频周跳探测中的周跳检测量构建,同类周跳检测量往往存在不敏感周跳、受扰动影响大等缺点,因此需要联合两种或两种以上周跳检测量进行联合探测。文献[11]联合无几何无电离层码相组合和无几何相位组合,削弱了电离层活动的影响。文献[12]利用小波变化对伪距进行去噪,并联合伪距相位组合法和电离层残差法,提高了对不敏感小周跳的探测能力。
当采用不同周跳检测量进行周跳探测时,需要构建不同的周跳阈值。传统的周跳探测方法往往采用固定阈值,该方法有时不能反映实际的周跳检测量误差,易造成周跳误探。近年来,一些动态自适应阈值的周跳探测方法被相继提出。文献[13]基于高度角和采样率,构建了三种不同轨道北斗卫星的无几何相位组合自适应阈值模型。文献[14]采用观测序列均方根值来构建MW组合的动态阈值模型。文献[15]通过前馈神经网络预测电离层延迟,设计了基于实际噪声水平的自适应检测阈值。文献[16]基于北斗卫星轨道类型和采样率设计了自适应阈值。
目前,关于多普勒积分法在周跳探测中的应用,大多基于单频和双频信号,而在三频方面的研究较少[4];同时,现有的三频方面研究大多基于静态数据,并采用固定阈值进行周跳探测,而基于动态数据和自适应阈值的研究较为匮乏;此外,现有研究通过构建不同的动态自适应阈值,提高了一些周跳探测方法的成功率,但针对多普勒积分构建自适应阈值的研究较为匮乏。基于以上研究现状分析,针对传统周跳探测与修复方法在动态环境下存在的问题,研究北斗三频周跳探测与修复方法。设计三频多普勒积分组合法,以削弱单频多普勒积分法的周跳检测量噪声,提高对小周跳的探测能力;联合2个多普勒积分组合和1个无几何相位组合,构成3个线性无关的周跳检测量,以解决多普勒积分组合法存在不敏感周跳的问题;构建基于滑动窗口和高度角的自适应阈值模型,辅助周跳探测,以减少动态环境下中低仰角卫星的周跳误探次数;采用空间搜索法,并遵循1-范数原则进行周跳修复。最后利用动态车载北斗三频数据进行实验。
1 北斗三频周跳探测与修复方法
1.1 多普勒积分法改进的周跳探测方法
1.1.1 三频多普勒积分组合法
载波相位观测方程为
λiφi=ρ+c(tr-ts)+T-Ii+λiNi+Mi+λiεφ,i
(1)
式(1)中:i=1,2,3,分别代表北斗B1、B2、B3三个频点的信号;φi为载波相位观测值;ρ为站星几何距离;T为对流层延迟;c为真空中的光速;tr和ts为接收机钟差和卫星钟差;λi、Ii、Ni、Mi、εφ,i分别为相应频率的载波波长、电离层延迟、整周模糊度、多路径误差、观测噪声。
多普勒观测方程为

(2)

由于接收机钟差和卫星钟差基本不随时间变化,在相邻历元间求差后可忽略,因此后文不再考虑这类误差的影响[5]。
多普勒积分观测方程为

(3)

在采样率较高时,多普勒观测值在历元间变化很小,因此多普勒积分可以在历元间采用梯形积分的方法来计算[8]。
多普勒积分计算式为
(4)
传统的单频多普勒积分周跳探测方法,是将载波相位变化量减去多普勒积分,该方法的周跳检测量噪声较大,难以探测小周跳[6]。而改进的三频多普勒积分组合法通过线性组合,可削弱周跳检测量中的噪声。
对式(3)中B1/B2/B3三种频率的多普勒积分进行线性组合,可得
(5)

对三种频率的载波相位进行线性组合,可得
λ(i,j,k)φ(i,j,k)=ρ+T+λ(i,j,k)N(i,j,k)-Q(i,j,k)I1+
M(i,j,k)+λ(i,j,k)ε(i,j,k)
(6)
对载波相位组合观测值进行历元间作差,消除接收机钟差和卫星钟差,可得方程
λ(i,j,k)Δφ(i,j,k)=Δρ+ΔT+λ(i,j,k)ΔN(i,j,k)-
Q(i,j,k)ΔI1+ΔM(i,j,k)+λ(i,j,k)Δε(i,j,k)
(7)
联合式(5)和式(7),可求得组合周跳检测量表达式为

(8)
由式(4)的梯形积分法可得周跳检测量计算式为
(9)
假设以周为单位的载波相位和以m/s为单位的多普勒在三个频段的观测精度相同,根据式(9)由误差传递公式可得周跳检测量标准差计算式为
(10)
1.1.2 组合系数选取
由于动态环境下多路径误差难以计算,且电离层延迟在高采样率条件下变化较小,因此优先考虑降低观测量噪声[17]。由式(10)可知,多普勒积分系数为l=m=n=1/3时,观测噪声标准差最小。
表1所示为多普勒积分组合法中较优载波相位组合系数及其属性。
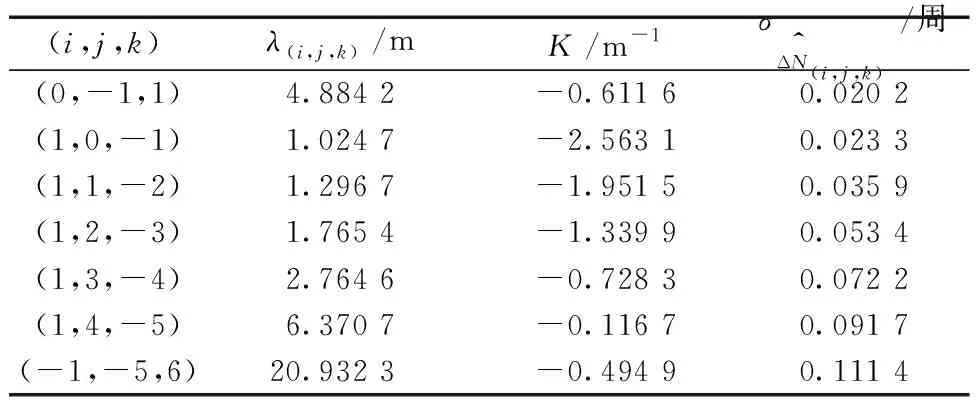
表1 多普勒积分组合Table 1 Doppler integration combination
从表1可知,组合系数(0,-1,1)有最小的噪声标准差,且波长较长、电离层延迟系数较小;(1,0,-1)虽然噪声较小,但电离层延迟较大;(1,4,-5)电离层延迟最小,但噪声过大,在接收机多普勒精度低的情况下容易误探。遵循波长较长、电离层延迟系数较小和噪声较小的原则,并进行综合考虑,本文中最终选取(0,-1,1)和(1,2,-3)作为多普勒积分组合法的两组载波相位系数。
1.2 无几何相位组合周跳探测方法
1.2.1 三频无几何相位组合法
无几何相位组合不存在站星几何距离和钟差,且具有较高的精度,在周期探测与修复中被广泛应用[18]。由于当ΔN1=ΔN2=ΔN3时,三频多普勒积分组合无法探测,因此本文联合1组无几何相位组合来进行周跳探测与修复。
对式(1)进行线性组合可得无几何相位组合表达式为
(11)
对历元间求一次差分后,可获得周跳检测量,即
(12)
假设以周为单位的载波相位在三个频段的观测精度相同,在忽略电离层延迟和多路径误差的情况下,根据式(12)并由误差传递公式,可得无几何相位周跳检测量标准差计算式为
(13)
1.2.2 组合系数选取
周跳检测量误差由电离层延迟、多路径误差、载波相位噪声组成,由于多路径误差在动态环境下难以计算,在选取组合系数时主要考虑减少载波相位和噪声电离层延迟对周跳探测的影响。针对多普勒积分组合不能探测ΔN1=ΔN2=ΔN3不敏感周跳的缺点,以(1,1,1)的检测量真值为分母,建立无几何相位的电离层延迟影响因子和组合噪声影响因子。影响因子越小,无几何相位的周跳检测量对(1,1,1)不敏感周跳的探测性能越敏感[19]。
电离层延迟影响因子为
(14)
组合噪声影响因子为
(15)
表2所示为常用的无几何相位组合系数及其属性。
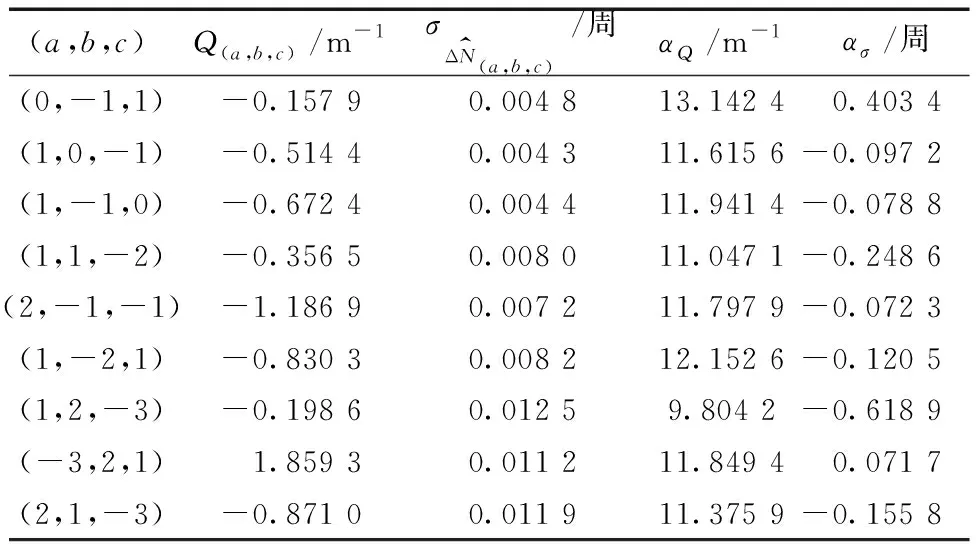
表2 无几何相位组合Table 2 Geometry-free phase combination
根据传统的组合系数选取方法,(0,-1,1)有着极小的组合噪声和电离层延迟系数,但它的组合噪声影响因子极大,导致三倍均方差的检测量阈值无法探测到(1,1,1)的不敏感周跳,因此在选取组合系数时考虑组合噪声影响因子和电离层延迟系数影响因子是可行的。为了保证不敏感周跳的准确探测,将电离层延迟影响因子较小、组合噪声影响因子较小作为高优先级选取条件,电离层延迟较小、组合噪声较小作为次优先级选取条件。综合考虑,本文最终选取(1,-1,0)作为无几何相位的组合系数。
1.3 自适应阈值构建
在目前大多数的周跳探测中,采用3倍或4倍的噪声标准差来作为固定的周跳检测量阈值。但在实际应用中,周跳检测量的精度与多种因素有关。研究发现多普勒精度与卫星高度角呈负相关,且多普勒精度与接收机性能有关,因此准确的固定阈值难以构建[20]。此外,在动态环境下,多路径效应的变化会使周跳检测量出现较大波动,引起大量误探的情况,干扰后期周跳的修复工作[13]。为了根据实际环境构建合适的周跳探测阈值,减少周跳探测中的误探情况,本文提出了周跳自适应阈值来解决该问题。
(16)
式(16)中:i为当前历元;n为滑动窗口宽度;本文中取n=50。
接着计算过去n个历元的中误差σ,公式为
(17)

(18)
式(18)中:“±”表示阈值的上下限;μ为阈值系数,一般取3或4。由于上文三组组合系数对应噪声标准差较小,本文中μ取4,根据正态分布原则,对应99.9%的置信水平。
针对多普勒积分组合在高仰角情况下自适应阈值B过小,导致误探增加的问题,引入高度角权重模型,即
(19)
式(19)中:E为临界高度角常量,动态环境中由于存在大量多路径误差,选为30°;e为卫星高度角变量,大于临界高度角时,高度角越高;k越小。
基于高度角权重模型和滑动窗口,构建多普勒积分组合自适应阈值,即
(20)
式(20)中:σ为基于滑动窗口计算出的组合噪声中误差,σ0为基于多普勒噪声经验标准差和载波相位噪声经验标准差计算出的组合标准差。当观测高度角小于30°时噪声较大,完全采用滑动窗口计算的自适应阈值;当高度角大于30°时噪声较小,引入经验标准差来减少自适应阈值的误探。
1.4 周跳修复
联合2个多普勒积分组合和1个无几何相位组合法,构造3个线性无关的周跳检测量联立方程组,保证了无公共不敏感周跳组合,从而对所有周跳组合进行探测与修复。
AX=L
(21)
(22)
进行检验,筛选出最优固定值。获取原始周跳后,对载波相位进行周跳修复。
2 实验验证与分析
为了验证算法的有效性,在南京江宁区宁丹大道附近进行实验,采用动态车载平台上的NovAtel OEM-719接收机接收北斗B1/B2/B3三频数据,采样间隔为1 s,大约共1 800个历元。对原始数据进行了预处理,得到了不含任何周跳的观测数据。实验平台如图1所示,路线如图2中黄线所示。

图1 车载实验平台及场景Fig.1 Experiment platform and scene

图2 实验轨迹图Fig.2 Trajectory of experiment
2.1 无周跳探测
为了验证自适应阈值相对于固定阈值的优势,先对无周跳数据进行探测,分析双方的误探个数。固定阈值采用4倍的噪声标准差。由于高度角会影响周跳检测量的噪声大小,选取三种不同高度角的卫星进行周跳探测分析,分别为高度角34°的地球静止轨道(geosynchronous orbit, GEO)卫星C60,高度角44°的GEO卫星C01,高度角69°~73°的中地球轨道(medium orbit, MEO)卫星C33。
多普勒积分组合(0,-1,1)和(1,2,-3)的周跳检测量记为D1、D2,无几何相位组合(1,-1,0)的周跳检测量记为D3。图3为C01、C33、C60卫星的周跳检测量变化曲线。表3统计了三个卫星在固定阈值和自适应阈值下的周跳误探次数。
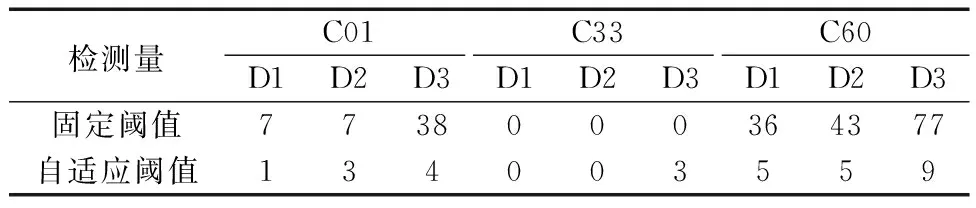
表3 周跳误探次数Table 3 Misjudgments in cycle slip detection
如表3所示,对于高仰角卫星C33,它的固定阈值误探次数为0,而无几何相位的自适应阈值因过小,导致了几次误探;不过在周跳搜索解算后3个频点的原始周跳都为0,不影响后续的周跳修复。对于中仰角卫星C01,无几何相位组合固定阈值误探次数明显增多,自适应阈值极大地降低了误探次数;多普勒积分组合的固定阈值存在少量误探,自适应阈值对其有一定提升。对于低仰角卫星C60,三种检测量的固定阈值都出现了大量误探,自适应阈值平均减少了88%的误探次数,极大地弥补了固定阈值不能反映实际观测量噪声的弊端。
2.2 小周跳探测与修复
在C01卫星的无周跳数据中人为地加入周跳,从第100历元开始,每100历元处添加一个小周跳组合,小周跳选取为(1,1,1)以内的所有周跳组合。表4为周跳检测量与修复值。图4为三种组合周跳检测量的变化曲线。
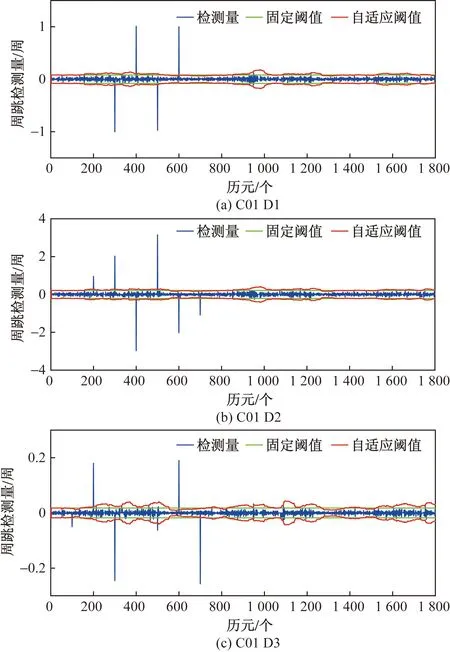
图4 小周跳探测Fig.4 Detect small cycle slips
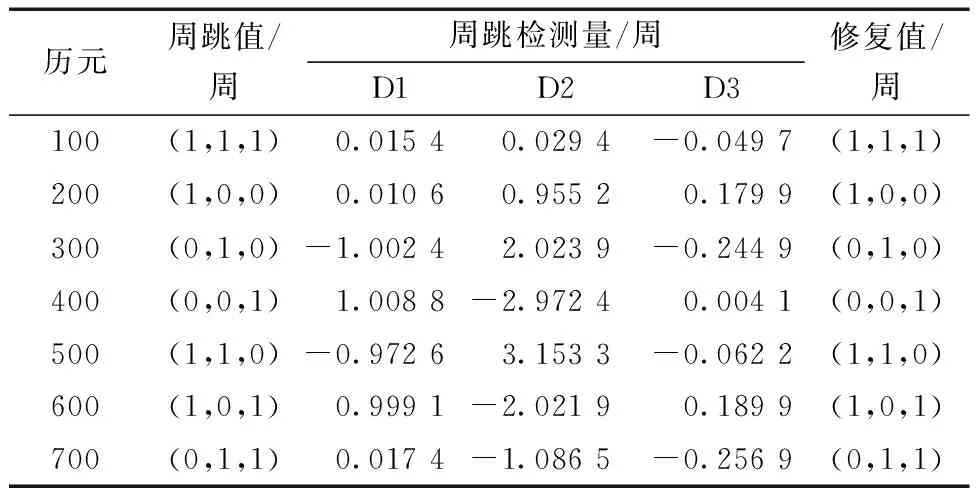
表4 小周跳探测与修复结果Table 4 Result of small cycle slips detection and repair
如图4所示,多普勒积分组合(0,-1,1)能探测B2和B3周跳值不相等的所有小周跳组合,组合(1,2,-3)能探测除(1,1,1)以外的所有小周跳组合,对于第100历元的不敏感周跳(1,1,1),可以利用无几何相位组合(1,-1,0)来探测。而关于无几何相位组合(1,-1,0),它可以探测除(0,0,1)以外的所有小周跳组合。如表4所示,三种组合方法联合后,能探测出(1,1,1)以内的所有小周跳组合并正确修复。
2.3 大周跳探测与修复
在C01卫星的无周跳数据中人为地加入周跳,从第800历元开始,每100历元处添加一个大周跳组合。分别添加了多普勒积分组合D1、D2的不敏感周跳(10,10,10),多普勒积分组合D1、无几何相位组合D3的不敏感周跳(40,31,31)、(53,41,41),无几何相位组合D3的不敏感周跳(0,0,10),以及几种随机的大周跳组合。表5为周跳检测量与修复值。图5为三种组合周跳检测量的变化曲线。
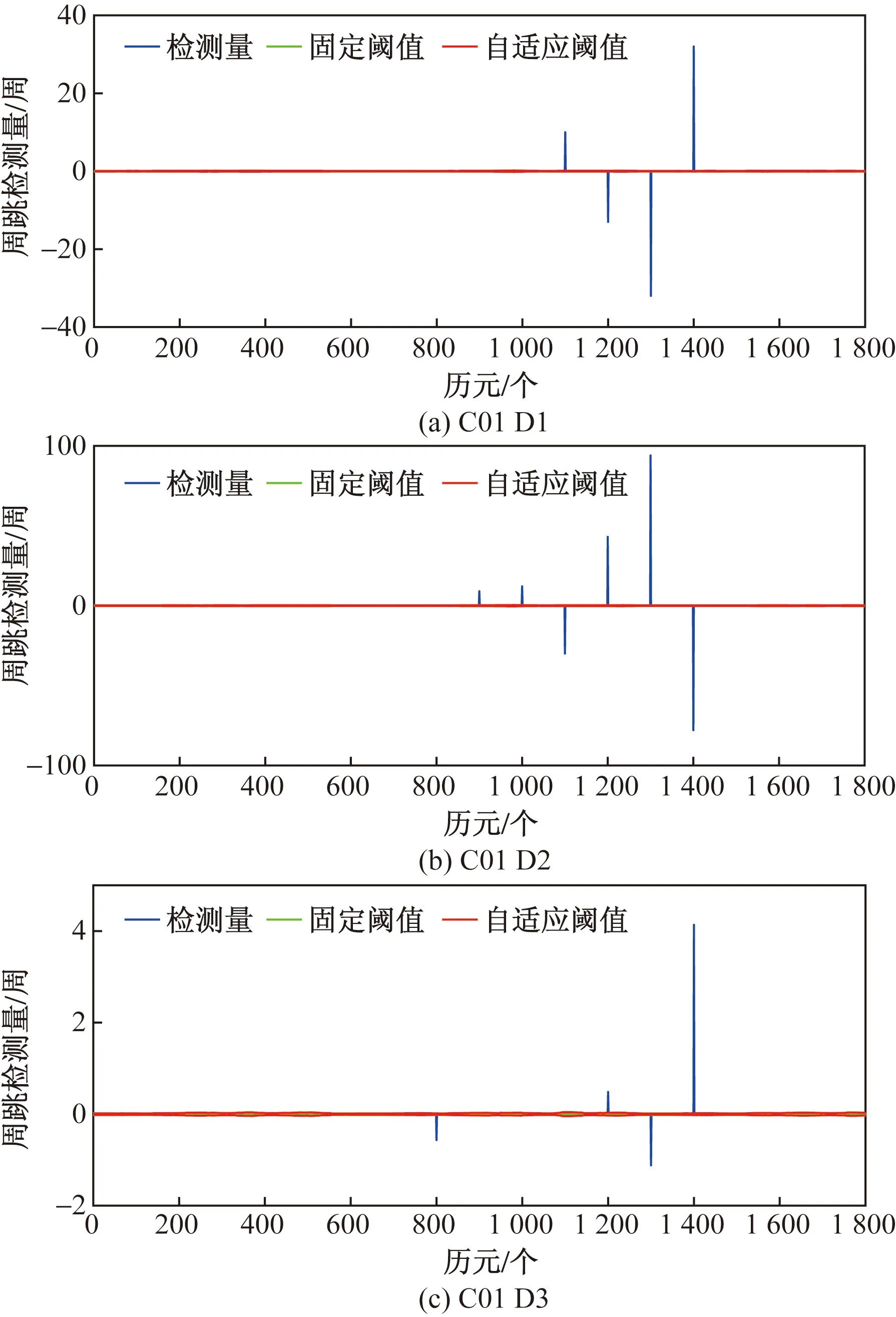
图5 大周跳探测Fig.5 Detect big cycle slips
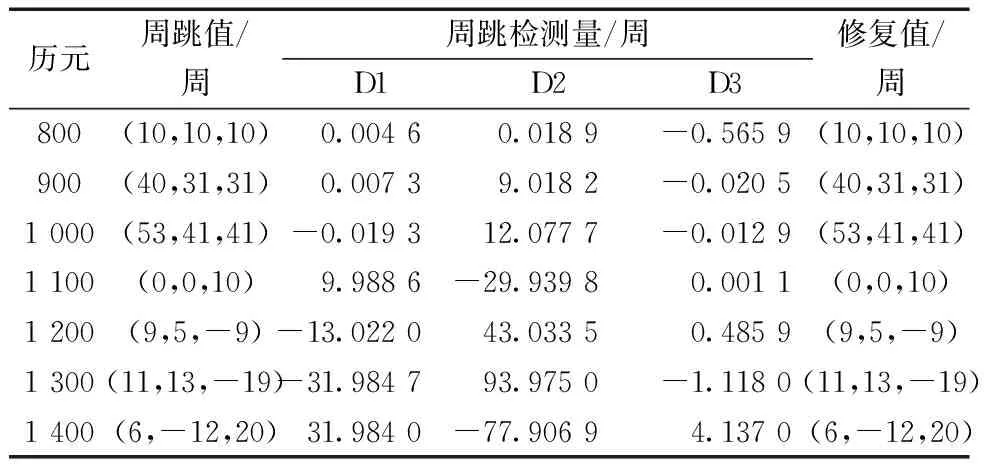
表5 大周跳探测与修复结果Table 5 Result of big cycle slips detection and repair
如图5所示,多普勒积分组合(0,-1,1)不能探测第800、900、1 000历元的不敏感周跳,组合(1,2,-3)不能探测第800历元的不敏感周跳,无几何相位组合(1,-1,0)不能探测第900、1 000历元的不敏感周跳,但通过三者联合进行周跳探测,可探测出所有的大周跳组合。如表5所示,三种方法联合后可对所有的大周跳组合进行正确修复。
3 结论
对北斗B1/B2/B3三频信号进行组合,基于传统的单频多普勒积分法设计了一种三频多普勒积分组合方法,联合三频无几何相位组合法进行周跳探测。基于滑动窗口构建了无几何相位组合法的自适应阈值模型,在滑动窗口基础上引入高度角权重模型,构建了多普勒积分组合法自适应阈值模型。在周跳修复方面,采用空间搜索法,基于自适应阈值确定多普勒积分组合的搜索范围,同时在观测质量较差的情况下,以最小-1范数为原则对周跳进行检验并修复。由实验结果得到以下结论。
(1)多普勒积分组合联合无几何相位组合,能克服双方无法探测各自不敏感周跳的缺点,从而对所有的周跳组合进行周跳探测。
(2)自适应阈值极大地降低动态环境下对中、低仰角卫星的周跳误测次数,提高周跳探测的性能,引入的高度角权重模型能降低高仰角环境下自适应阈值负优化的情况。
(3)在周跳修复方面,采用空间搜索法和最小1-范数原则,能对所有的周跳组合进行正确求解并修复。
猜你喜欢
发明与创新·初中生(2023年1期)2023-05-30
测绘学报(2022年5期)2022-05-31
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
中学生数理化(高中版.高考理化)(2020年6期)2020-11-26
中国惯性技术学报(2020年2期)2020-07-24
——记叙文选材组材创新方法之三
青少年日记(2018年3期)2018-11-30
雷达学报(2017年6期)2017-03-26